
Fターム[2F112AD01]の内容
光学的距離測定 (16,745) | その他の光学的距離測定 (821) | 光波の伝搬時間を測定するもの (546)
Fターム[2F112AD01]に分類される特許
1 - 20 / 546
距離計測方法および装置とそれを搭載した形状計測装置
レーザレーダシステム、レーザ測距装置および制御装置
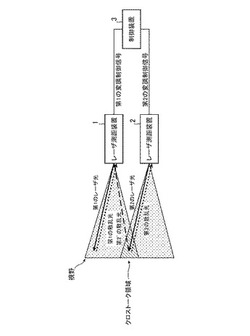
【課題】広視野な受信系においてクロストークによる誤りを回避する。
【解決手段】レーザ測距装置1,2は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(レーザ装置11、変調器12およびスキャナ13)と、対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ15および受光器16)と、電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出装置17とを備え、制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる。
(もっと読む)
距離測定装置

【課題】距離測定装置において、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能とすることを目的とする。
【解決手段】2次元スキャナおよび投光角拡大レンズを含み投光ビームを前方に投光する投光系と、投光系のビーム走査角度と同等以上の受光視野角を有すると共に受光に関する第1の光路が投光角拡大レンズの投光に関する第2の光路と独立しており投光角拡大レンズより前方、且つ、投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えるように構成する。
(もっと読む)
レーザレーダ装置
【課題】広視野な受信系において背景光を除去する。
【解決手段】所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(発振器1、レーザ装置2、変調器3およびスキャナ4)と、レーザ光に対する対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ6および受光器8)と、受光面の前段に配置され、閉じることで対応する位置に入射した光を遮光する複数のシャッター素子を有するシャッター7と、電気信号と変調信号との位相差または時間差に基づいて対象物までの距離を算出する距離・強度算出装置9と、電気信号に基づいて背景光を検出する背景光検出装置10と、背景光が検出された場合に、シャッター7を制御して、当該背景光が入射する位置に対応するシャッター素子を閉じさせるシャッター制御装置11とを備えた。
(もっと読む)
距離計測装置
【課題】計測距離の精度向上を図る。
【解決手段】駆動部14によりレーザ光の照射方向が鉛直下方向になったときに計測される距離計測装置と地面との距離と、メモリに記憶された情報に基づいて特定される距離計測装置と地面との距離の差分から計測距離の総合誤差を算出し、この計測距離の総合誤差を用いて計測距離が補正する。
(もっと読む)
光3次元カメラ
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
レーザレーダ装置
【課題】距離の異なる複数の検出対象を同時に検出することができ、低コストで精度の高い測距を行なうことのできるレーザレーダ装置を提供する。
【解決手段】光源と、前記光源より出射された光を走査する光走査部と、前記光走査部より出射された光が検出対象に照射されることにより、前記検出対象において反射された光を受光する受光部と、を有し、前記検出対象と前記受光部との間には、複数の貫通孔を有する多孔部材が設置されていることを特徴とするレーザレーダ装置を提供することにより上記課題を解決する。
(もっと読む)
無線方式レーザスキャナ設定取得方法
【課題】レーザ光を使用したレーザ計測システムにおけるレーザスキャナに関して、従来のようにコード等の有線に影響されることなく、安全且つ自在に、レーザスキャナのエリア設定及び計測結果の取得を遠隔から行うことができるようにした無線方式レーザスキャナ設定取得方法を提供する。
【解決手段】レーザ光を発射する発光部と発射したレーザ光の反射光を受光する受光部とを有するレーザ計測装置に、レーザ光の発光時と反射光の受光時との時間差により測定対象物までの距離を計測する距離計側部からの計測信号を遠隔制御装置に無線通信によって送信する一方、遠隔制御装置からの制御信号をレーザ計測装置に無線通信によって送信することにより、遠隔制御装置で、レーザ計測装置によって計測された計測結果の取得とレーザ計測装置に設定すべき信号の制御とを行うようにした。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
距離計測装置
【課題】発光素子の温度変化に対する計測精度の変化を抑制する。
【解決手段】投光手段1は、対象空間に投光する発光素子11を備え、受光手段2は、対象空間からの光を受光する受光素子21を備える。制御手段3は、投光手段1に変調信号を与えて発光素子11から時間経過に伴って強度が変化する変調光を投光させ、変調信号に同期する復調信号を受光手段2に与えて受光素子21の出力から変調光の成分を抽出する。演算手段4は、投光手段1から対象空間に投光された変調光が受光手段2に受光されるまでの時間を計測することにより、対象空間に存在する物体までの距離を算出する。温度測定手段6は、発光素子11の温度を計測し、精度維持手段7は、温度測定手段6が計測した温度が高いほど発光素子11の駆動電流を大きくし、発光素子11の温度変化に対して受光素子21に入射する変調光の変化を抑制する。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
運転支援装置
【課題】車両近傍の物体検出を精度よく行うことができる運転支援装置を提供することを目的とする。
【解決手段】本発明の運転支援装置は、車両周囲を撮像する撮像カメラ10と、車両周囲に照射光を発するLED23と、反射光を取得する第2の撮像素子21と、反射光に基づいて距離画像を算出する第2の信号処理部22と、距離画像から物体を検出する物体検出処理部36とを備える。そして、第2の信号処理部22が算出した距離画像のうち物体検出処理部36が検出した物体を示す画像を撮像カメラ10が撮像した撮像画像に合成する合成手段37と、この合成手段37が合成した合成画像を表示する表示装置40を備えたことを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子21が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、ミラー30の上方側において反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡71が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
半導体装置の駆動方法
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
レーザレーダ装置
【課題】カバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、フォトダイオード20の受光面20aの前方側且つ下方側にフィルタ部材90が配置され、このフィルタ部材90は、当該フィルタ部材90の下面90aとのなす角度が小さくなる光ほど透過を抑制する角度依存性を有すると共に、透過板80から受光センサ側に向かう斜め方向の外乱光の透過を抑制するように構成されている。また、上記フィルタ部材90は、上下方向の光については透過するように構成されているため、凹面鏡41によって上方に導かれる正規の反射光(外部空間の物体からの反射光)については、フィルタ部材90を透過する際に抑制されにくくなる。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置を、レーザビームの走査面を90°以内で変化可能な構成とし、走査面を一方向に角度45°だけ傾けて距離Laを測定し(S3)、次は走査面を逆方向に90°だけ傾けて距離Lbを測定する(S4,S5)。測定距離La,Lbより地面内の第1基準水平方向に対して傾いている角度θcを算出し(S6)角度θc傾ける(S7)。次に走査面を地面と直角にして(S8)距離Ld1,Ld2を夫々測定し(S10,S11)、その測定結果よりレーザビームが基準角度0°にある状態で第2基準水平方向と平行になるまでの角度差θxを算出すると(S12)、本体を地面の方向に角度差θxだけ傾けて走査面を90°回転させる(S14)。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
1 - 20 / 546
[ Back to top ]