
Fターム[2F112AD10]の内容
光学的距離測定 (16,745) | その他の光学的距離測定 (821) | その他 (159)
Fターム[2F112AD10]に分類される特許
1 - 20 / 159
画像処理装置、車両システム、及び、画像処理方法
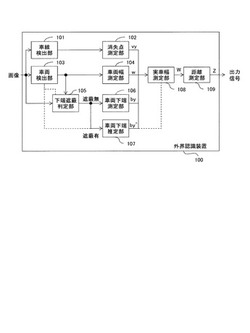
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
距離推定装置

【課題】自車両と当該自車両の周囲に存在する障害物との距離を推定し、その推定値が信頼できるものかどうかを判定することにより、距離の誤認識を防止することができる距離推定装置の提供。
【解決手段】自車両と、自車両周辺に存在する障害物との距離を推定する距離推定装置であって、自車両周辺を撮像する撮像手段と、上記撮像手段が撮像した画像から上記障害物の複数の特徴点の像を抽出し、上記画像内の特徴点間距離に基づき上記自車両と上記障害物の距離を推定する距離推定手段と、上記画像内における上記複数の特徴点の像のうち少なくとも一つの特徴点の像の位置に基づき、上記距離推定手段が推定する距離の信頼性を判定する信頼性判定手段とを備える。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
測距システム、画像処理装置、コンピュータプログラム及び測距方法
【課題】撮影部と表示部とを有する携帯端末で、それらの端末間の距離を計測する測距システムを提供する。
【解決手段】 測距システム(100)は、所定の時系列で所定の図形を表示する表示部(51B)を有する計測対象物(50B)と、所定の図形を撮影する撮影部(53A)と、撮影部(53A)により撮影された所定の図形と予め記憶された所定の図形の設計値とに基づいて、計測対象物から撮影部までの距離を計測する距離計測部(576)と、を備える。
(もっと読む)
撮像装置及び眺望判定方法
【課題】 任意の被写体を含む空間の眺望の程度を判定することができる撮像装置を提供する。
【解決手段】 任意の被写体を含む空間を撮像する撮像部8と、前記任意の被写体を含む空間の基準画像を取得する基準画像取得部4と、前記撮像部により撮像された撮影画像と前記基準画像とを比較することにより前記撮影画像における前記任意の被写体の眺望の程度を判定する眺望判定部4とを備える。
(もっと読む)
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
測距方法及び到達時間算出方法
【課題】赤外線カメラによる測距方法を提供する。
【解決手段】赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの赤外線熱画像を2値化し、2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、目標の候補を抽出し、設定された各ウインドウ内に含まれる画素について輝度値を積算し、目標候補が放つ熱量相当の輝度を算出し、輝度の積算値がフレーム毎に増加しているウインドウを選択して、目標を抽出し、目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
把捉物位置認識装置、把捉物位置認識方法、把捉物位置認識プログラム
【課題】把捉対象である記憶媒体の把捉機構に対する相対位置を正確に把握する。
【解決手段】記憶媒体がハンド機構10に対して近づくまたは遠ざかる方向を当該記憶媒体の奥行き方向として、カメラ部20により撮影された画像を解析した結果に基づき記憶媒体の画像内の位置に係る特徴物情報を検出し、記憶媒体の奥行き方向における位置を特徴物情報に1対1対応した奥行き位置情報として導出する演算処理機構30を備えたことを特徴とする把捉物位置認識装置。
(もっと読む)
測位装置、歩幅データ補正方法およびプログラム
【課題】 この発明は、移動量の計測にGPSを利用することなくユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供する。
【解決手段】 被写体の撮影を行う撮影手段と、加速度を検出する加速度センサと、方位を計測する方位センサと、歩幅データを記憶する歩幅データ記憶手段と、直線状の移動経路上の複数の地点(X1,X2)でそれぞれ行われた撮影の情報に基づき複数の地点(X1,X2)間の距離を算出する距離算出手段と、この距離とこの移動中に計数された歩数に基づいて歩幅データを補正する歩幅補正手段とを備えている。
(もっと読む)
物体検出装置及び物体検出方法
【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
画像処理装置およびその方法
【課題】撮像データから被写体の実距離を高精度に推定する。
【解決手段】距離推定部200は、符号化開口を有する絞りを備えた撮像光学系を用いて撮像された撮像データを入力し、撮像データを撮像した前記撮像光学系の撮像パラメータを取得する。スペクトル計算部701は、撮像データのスペクトルを算出する。スペクトルモデル生成部702は、撮像パラメータおよび被写体距離に対応する光学特性情報、並びに、スペクトルモデルを用いて、撮像データに対応するスペクトルモデルである予測モデルを生成する。評価関数生成部707は、撮像データのスペクトルおよび予測モデルを使用して評価関数を生成する。距離推定部200は、評価関数から撮像データが表す画像に含まれる被写体の実距離を推定する。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
距離情報取得装置、撮像装置および構造化開口ユニット
【課題】構造化開口の一定の形状に固定されていると、シーンに対する測定可能な奥行き範囲などが固定されてしまう。
【解決手段】距離情報取得装置は、入射する被写体光束を複数の波長帯に分離して検出する受光素子と、被写体光束を受光素子に導く光学系と、複数の波長帯のうちの一つに含まれる第1波長帯を透過する第1フィルタ領域と、複数の波長帯のうちの一つに含まれ、第1波長帯とは異なる第2波長帯を透過する第2フィルタ領域を、光学系の光軸に対してそれぞれ偏心した位置に有する構造化開口と、第1フィルタ領域および第2フィルタ領域のそれぞれを部分的に遮光することにより、被写体光束が透過する領域の面積を変更する透過領域変更機構とを備える。
(もっと読む)
パッシブ型光学式測距センサ、電子機器および測距方法
【課題】人体の存在を検知すると共に、人体までの距離を検出でき、かつ、コンパクトで、消費電力を抑制できるパッシブ型光学式測距センサ、電子機器および測距方法を提供すること。
【解決手段】パッシブ型光学式測距センサに、遠赤外線領域に受光感度を持つ位置検出素子1,2を使用する。このようにして、発光素子及びその駆動回路を持たず省電力化が可能な人体検知用パッシブ型光学式測距センサ及びその測距方式の実現を可能にする。
(もっと読む)
距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法
【課題】低価格な距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法を提供する。
【解決手段】距離画像センサ100は、x軸、y軸、及びz軸からなる座標空間において、入射された平行光が複数の分割光に分割され、z軸に交差する所定の投光平面上に、複数の分割光が形成する複数の投光スポットによって画定される複数の線分とx軸とが成す複数の角度が所定の角度となるように、入射される平行光の進行方向を変更する回折格子が形成された回折光学素子131及び132を備える。さらに、距離画像センサ100は、複数の分割光によって対象物上に形成される複数の投光スポットで画定される複数の線分のx軸に対する傾きに基づいて、複数の投光スポットとの複数の距離を測定する(決定する)距離測定部(距離決定部)117とを備える。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
光センサー
【課題】光センサーの光学系において光源光の使用波長が変動しても、1/4波長板が確実に直線偏光を円偏光に変換して、良好なセンサー感度を確保維持する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び二次元イメージセンサー6,14を備える。波長板ユニットは、構造性複屈折を利用した1/4波長板7と、反射面を有する振動板8との一体構造からなる。二次元イメージセンサーは受光面6a,14aに同心で異なる半径の円形ビームスポット形状が振動板の反射面8aの位置に対応して入射し、その出力信号からビームスポット形状の面積又は半径を測定して振動板の位置又は変位量を検出する。
(もっと読む)
1 - 20 / 159
[ Back to top ]