
Fターム[2F112CA11]の内容
Fターム[2F112CA11]の下位に属するFターム
距離(位置)の検出 (895)
変位の検出 (108)
高さ(立木、建造物等を三角測量的に測定) (16)
Fターム[2F112CA11]に分類される特許
1 - 2 / 2
光学式位置検出装置および位置検出システム
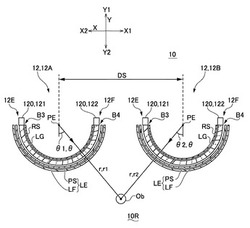
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
変位センサ及び形状測定システム

【課題】測定対象物の変位測定精度の低下を抑制可能な変位センサ及び形状測定システムを提供する。
【解決手段】制御回路21は、電圧信号S1の解析により最大受光量Dnを検出し、メモリ24に各サンプリングタイミングに対応付けて記憶し、たとえば現在のサンプリングタイミング以前の複数周期分の最大受光量の平均値Kを演算し、この平均値Kが目標レベルTh1と同じ受光ランクに属するかどうかに基づき受光面19aでの受光状態の安定・不安定を判断し、不安定と判断したときは、コントローラ12に測定信号S3を出力するとともに不安定を示すハイレベルの出力信号S4を出力する。
(もっと読む)
1 - 2 / 2
[ Back to top ]