
Fターム[2F112FA41]の内容
Fターム[2F112FA41]に分類される特許
321 - 331 / 331
ステレオ画像処理装置
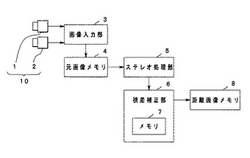
【課題】ステレオマッチング処理におけるマッチング処理を高精度にする。
【解決手段】 対象物を撮像する撮像手段1,2と、前記撮像手段で撮像した一対の画像の小領域毎に、互いの相関を求めることで対応する領域を特定するステレオマッチング処理を行い、ステレオマッチング処理結果である評価関数、該評価関数に基づいて得られる前記対象物までの距離情報及びその信頼度を示す信頼度情報を取得するステレオ処理手段5と、前記信頼度に応じて対象となる小領域の周辺に再探索範囲を設定し、前記再探索範囲内の小領域について求めた前記評価関数に基づいて、前記対象となる小領域について求めた評価関数を修正して修正評価関数を求め、求めた修正評価関数に基づいて距離情報を補正する視差補正手段6とを備えたことを特徴とする。
(もっと読む)
光学的変位測定器

【課題】新しい方法により、使いやすい光学的変位測定器を提供することである。
【解決手段】測定対象物8の前方に円錐形状の対物プリズム16が配置される。光源12、コリメートレンズ14により、対物プリズム16の中心光軸30から平行に偏移した往路光40が対物プリズム16を通り、その円錐形状の界面で屈折して測定対象物8に入射される。測定対象物8の表面で反射された光は、対物プリズム16に戻され、その円錐形状の界面で再び曲げられ、往路光40に平行な復路光46となる。中心光軸30からの復路光46のオフセット量は、測定対象物8の変位に応じて変化する。復路光46を集光レンズ18で焦点19に集光し、ピンホール光学素子20で散乱光の影響を抑制して、光位置検出センサ22でオフセット量を検出し、測定対象物8の変位を測定する。
(もっと読む)
物体検出装置
【課題】画像上で複数の物体が接近し又は一部重複している場合でも、各物体を個別且つ安定に識別する。
【解決手段】検出されたトラック70の空間上での位置に基づいて物体位置領域82aを算出する。前時刻に記録された物体位置領域82aに相当するテンプレート80aを呼び出す。テンプレート80aを基準画像Ib上で類似度が最大となる位置に移動させる。物体位置領域82aと移動したテンプレート80aとの重なり割合(R(t-1)∩Rt)を算出する。重なり割合を用いて、過去に検出された物体と同一か否かを判断する。
(もっと読む)
移動体周辺監視装置
【課題】ステレオ画像に基づいて物体を検出する際、計算時間の短縮と計算コストの低廉化を図る。
【解決手段】基準カメラ12により基準画像Ibを撮像し、参照カメラ14により参照画像Irを撮像する。基準画像Ib及び参照画像Irから平面領域Πfを抽出する。基準画像Ibからエッジや特徴点を抽出したエッジ画像を作成し、平面領域Πfを除去した修正エッジ画像62を生成する。修正エッジ画像62のエッジや特徴点に対して参照画像Irを参照しながら物体検出処理を行う。
(もっと読む)
測距装置
【課題】 本発明は、測定分解能を変更することのできる測距装置を提供することを目的とする。
【解決手段】本発明の測距装置は、測距対象物に向けて所定の測定用信号を発信する発信部(110)と、前記測距対象物の方向から戻る信号を受信する受信部(120)と、前記発信部及び前記受信部を駆動する測定処理を実行し、前記受信部で受信された信号に基づいて前記測定用信号の発信から受信までの時間を検知すると共に、前記受信部が信号を受信する際の分解能を可変にする制御部(100’)とを備えたことを特徴とする。
(もっと読む)
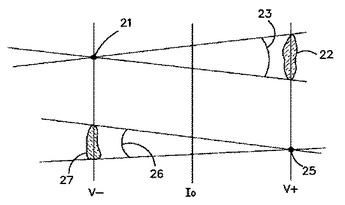
量子化誤差を軽減する距離計測方法
【課題】有限画素からなる撮像素子を有するカメラを用いた三角測量法による距離計測方法において、量子化誤差を軽減することを目的とする。
【解決手段】2台のカメラの組合せにより既知の距離を予め計測しておき、計測結果に基づく量子化誤差パターンを作成する。この誤差パターンと計測結果とから誤差を表現する関数を求め、関数の最小値から、真の距離を得る。誤差を表現する関数は、誤差の自乗を縦軸とするとき、横軸に実距離をとる2次曲線で表される。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 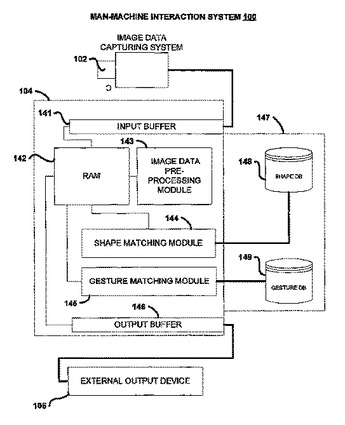 (もっと読む)
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
位置検出デバイス
n個のセグメントと、光検出要素アレイのセグメントからの出力値(OV)を比較することによって、最大強度を有するセグメントを識別するように構成されるパラレル算術処理部とを有する光検出要素アレイを備える位置検出デバイス。パラレル算術処理部は、最大強度を有するセグメントが選択されるまでセグメントを順に選択/除外するように構成される少なくとも1つの比較段を備え、第1段は、入力セグメント(IS)としてそれぞれの光検出要素セグメントから出力値OVを受け取り、追加段は、入力セグメントISとして先行する段から出力値OVを受け取る。その位置検出デバイスを備えるレンジファインダもまた提供される。 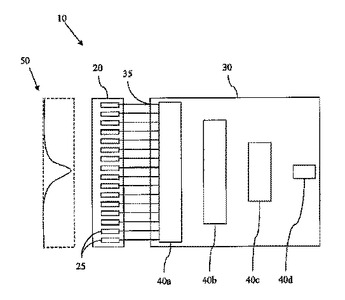 (もっと読む)
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
321 - 331 / 331
[ Back to top ]