
Fターム[2F112FA41]の内容
Fターム[2F112FA41]に分類される特許
141 - 160 / 331
相関演算方法、相関演算装置、焦点検出装置および撮像装置
【課題】一対のデータ列の相関量を正確に求める。
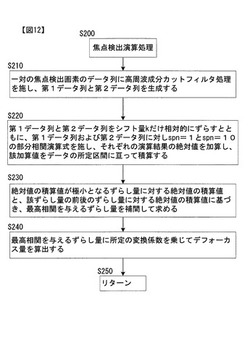
【解決手段】複数のデータが一次元上に配列された第1データ列と、複数のデータが一次元上に配列された第1データ列とは異なる第2データ列とを、一次元上で変位量を変えながら相対的に変位させ、複数の相関演算式により第1データ列と第2データ列の間の相関量を演算する(S220)。
(もっと読む)
測距装置

【課題】防振機能付き測距装置の低コスト化を図ること。
【解決手段】測距装置1は、目標物体に向けレーザ光L1を投射する送信光学系10と、目標物体で反射した反射レーザ光L2を受光素子34により受光する受信光学系30とを備える。手ブレなどで光軸2,4が傾いたとき、送信光学系10に配設された防振レンズ14を駆動機構42によりM1のように変位させて光線を偏向する。駆動機構42に連動して受信光学系30に配設された防振レンズ32を駆動機構43によりM2のように変位させるが,M2はM1よりもラフな動作とする。
(もっと読む)
固体撮像素子及び測距装置
【課題】撮像部の出力をその平均値を基準として差動増幅する際に発生する誤差成分の影響をなくすことができる固体撮像素子及びこのような固体撮像素子を用いた測距装置を提供すること。
【解決手段】隣接して配置される複数の画素列111a、111bの光電荷蓄積を同じタイミングで行う。画素列111aからの信号の読み出し時に、平均値保持回路121において画素列111aからの信号の平均値を演算して保持しておくとともに、利得設定値保持回路123において平均値基準読み出しの際の利得を演算して保持しておく。画素列111bからの信号の読み出し時に、平均値保持回路121に保持しておいた平均値及び利得設定値保持回路123に保持しておいた利得を用いて、差動増幅回路126における差動増幅を行う。
(もっと読む)
距離測定装置および距離測定方法
【課題】対象物の距離情報を短時間で測定できる、小型の情報測定装置を提供する。
【解決手段】画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像センサカメラ1は、メインレンズ11と、シャッター12と、マイクロレンズアレイ13と、撮像セルアレイ14とを含む。シャッター12の開口パターンは複数あり、各パターンにおいて、シャッター12の各開口部を通過する光は、撮像セルアレイ14の互いに異なる領域に入射する。
(もっと読む)
相関演算方法、相関演算装置、焦点検出装置および撮像装置
【課題】同一性が崩れた一対のデータ列の相関関係を演算する。
【解決手段】複数の第1データA1,A2,・・が一次元上に配列された第1データ列ANと、複数の第2データB1,B2,・・が一次元上に配列された第2データ列BNとを、一次元上で変位量を変えながら相対的に変位させ、第1データ列ANと第2データ列BNの間の相関量を演算して相関量の極値が得られる変位量を求める相関演算方法において、複数の第1データAn、An+1のN階(ただし、N=1,2,・・)の差分データ(An−An+1)から成る第3データ列と、複数の第2データBn+k、Bn+1+kのN階の差分データ(Bn+k−Bn+1+k)から成る第4データ列との間で内積演算を行い、算出された演算値を相関量とする。
(もっと読む)
変位検出装置、露光装置、およびデバイス製造方法
【課題】 例えばガラス基板の表面に付着した異物の影響を抑えて、その裏面の面位置の変位を高精度に検出することのできる変位検出装置。
【解決手段】 被検面(20a)の面位置の変位を検出する変位検出装置は、第1乃至第3の光(L1,L2,L3)を被検面の第1乃至第3位置へそれぞれ導いて被検面またはその近傍に第1乃至第3の集光点を形成するための、第1乃至第3の光に共通の光学系(3,4,5)と、被検面で反射された第1乃至第3の光に基づいて第1乃至第3位置における第1乃至第3変位情報をそれぞれ検出し、該3つの変位情報のうちの互いに最も類似した2つの変位情報に基づいて被検面の面位置の変位を検出する検出系(DS:5,4,3,6,7,8,9)とを備えている。
(もっと読む)
距離測定装置および距離測定方法
【課題】奥行き分解能の高い距離測定装置あるいは距離測定方法を提供する。
【解決手段】本発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成画像を生成する再構成部4aと、複数の再構成画像の各々を複数の領域に分割し、各領域について、領域に含まれる画素の輝度の大きさを代表する第1の代表値を算出し、第1の代表値に基づいて画素群内の輝度分布の偏りの大きさを表わす第2の代表値を算出する輝度情報算出部4bと、第2の代表値に基づいて対象物までの距離を算出する距離情報算出部4cとからなる。
(もっと読む)
距離測定装置および距離測定方法
【課題】精度よく距離情報を測定できる小型かつ低コストの距離測定装置を提供する。
【解決手段】本願発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成部4aと、輝度情報算出部4bと、距離情報算出部4cと、マスク部4dとからなる。マスク部4dは、画像センサカメラ1内部のマイクロレンズアレイ12の非レンズ部に対応する画素の値を所定の値に変換する。
(もっと読む)
3D撮像システム
目的物表面の三次元モデルを計算する装置・方法を開示する。少なくとも一の指向性エネルギ源が目的物を指向的に照射する。相互に相対して固定位置で少なくとも二の空間的に離れたビューポイントを有する撮像アセンブリは目的物がエネルギ源で照射されると個々のビューポイントにおける目的物の一連の画像を記録する。所定形状フィーチャを有する少なくとも一のテンプレートは目的物と同時にビューポイントに対し可視である。ビューポイントにて記録された画像は分析され一連の画像内の個々の画像に対してテンプレートに相対する個々のビューポイントの位置及びポーズを判別する。目的物に対する測光データはビューポイントの計算された位置及びポーズと画像データを用いて生成される。目的物の初期の三次元モデルを含む形状データは光学三角測量を用いてステレオスコープ復元を実行して生成される。形状及び測光データは組み合わされ三次元モデルを構築する。 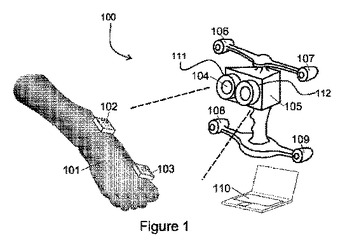 (もっと読む)
(もっと読む)
距離測定装置および距離測定方法
【課題】対象物の距離情報を短時間で測定できる、小型の情報測定装置を提供する。
【解決手段】本願発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成部4aと、輝度情報算出部4bと、距離情報算出部4cと、領域選択部4dとからなる。
(もっと読む)
光学式変位計
【課題】
1次元イメージセンサに2つの出力を設けた時に発生する増幅回路のオフセット量及びゲインの個体ばらつきの影響を低減した光学式変位計を提供することを目的とする。
【解決手段】
1次元イメージセンサ20の奇数画素20aと偶数画素20bの受光量を異なる出力ポートから個別に読み出して、異なる増幅回路15a、15bによって独立して増幅する。増幅された奇数画素20a、偶数画素20bの2つの受光量から形成された2つの受光量分布から、各々受光量のピークとなる画素位置を算出する。算出された2つの画素位置に基づいて、測定対象物までの距離を算出する。。
(もっと読む)
測距装置
【課題】背景光による測定誤差の少ない少数ロットのシステムを安価に組み立てられる測距装置を提供する。
【解決手段】発光ダイオード11から出力した検知光を測定対象A1に向かって射出し、検知光の反射光をレンズ13で収束してリニアセンサ14の検知面14aに収束スポットSPを形成させる。演算素子15は、リニアセンサ14からシリアルデータで出力される102個の受光素子18のそれぞれの受光量の数値データを用いて収束スポットSPの受光量ピークを識別して、測定対象A1までの距離を演算し、演算結果を出力端子OUT1〜OUT4を通じて4ビットのパラレルデータで出力する。
(もっと読む)
距離計測装置
【課題】高速、かつ、高精度に自己に対して相対的に移動する物体までの距離を計測する。
【解決手段】カメラ11,12は、所定のフレームレートで前方を撮像する。抽出部23は、所定のフレームレートで順次入力される入力画像を基準画像、参照画像とし、各基準画像において車体に対して相対的に移動している物体が撮像されている領域を抽出する。設定部24は、抽出部23により抽出された領域から処理対象となる対象領域を求め、基準画像に設定する。探索部31は、基準画像において設定された対象領域内に注目画素を順次設定し、各注目画素の対応点を参照画像から探索する。距離算出部32は、注目画素と対応点とを基に、ステレオ法による測距方法を用いて物体までの距離を求める。
(もっと読む)
距離計測装置及び距離計測方法
【課題】
非平行で完全平面ではない反射板に映る2重像を1台の撮像装置で撮影して得られた1枚の画像に基づいて安価な装置構成及び短い計測時間で高精度な距離計測を行い得るようにした距離計測装置を提供する。
【解決手段】
反射板に写る位置ずれのある2重像を撮像手段で撮影して得られた画像から、2重像間変位を算出する2重像間変位算出部と、既知の距離にある複数のキャリブレーション平面を2重像として撮影した複数の画像から、反射板の形状、姿勢、屈折率及び撮像手段のカメラ光学中心から反射板までの光軸に沿った距離を表す外部パラメータを推定するキャリブレーション処理部と、外部パラメータと計測対象を2重像として撮影した1枚の画像から計測対象までの距離を算出する距離算出部とを備え、反射板を局所的に非平行な平面で近似し、キャリブレーション処理部で推定された外部パラメータは、2重像を撮影した画像上の注目点に応じて異なる値を持つ。
(もっと読む)
距離計測装置及び距離計測方法
【課題】距離の測定対象となる対象物の大きさに関わらず、対象物までの距離を安定して算出する。
【解決手段】抽出部20は、基準カメラ110から順次入力される入力画像を基準画像、参照カメラ120から順次入力される入力画像を参照画像とし、各基準画像から前方車体が撮影されている領域である物体領域を抽出する。面積算出部30は、抽出部20により抽出された物体領域の面積を算出する。密度設定部40は、面積算出部30により算出された物体領域の面積が小さくなるにつれて、注目点の設定密度を高くする。対応点探索部50は、密度設定部40により変更された注目点の設定密度に従って、抽出部20により抽出された物体領域内に注目点を順次設定し、各注目点の対応点を、注目点を設定した基準画像と同一時刻に取得された参照画像から探索する。
(もっと読む)
環境認識装置
【課題】対象物を有効に検出して周囲の環境を認識することが可能な環境認識装置を提供する。
【解決手段】環境認識装置1は、一対のカメラ2a、2bで周囲の環境中の対象Vahを撮像して2枚一組の画像TO、TCを出力する撮像手段2と、異なる撮像方法で撮像され、または撮像された2枚一組の画像に対して異なる画像処理方法を施して形成される2枚一組の画像の複数の組に対してステレオマッチング処理を行って各組ごとに距離画像TZ1、TZ2を形成するステレオマッチング手段7a、7bと、各距離画像TZ1、TZ2をそれぞれ複数の区分Dnに分割して各区分Dnごとに代表視差dpn1、dpn2を算出し、対応する区分Dnの各代表視差dpn1、dpn2のうちいずれかの代表視差を選択して当該区分Dnの代表視差dpnとする選択手段11と、各区分Dnの代表視差dpnに基づいて画像TO中に撮像された対象を検出する検出手段12と、を備える。
(もっと読む)
測距用画像選択機能を有する測距装置
【課題】赤外線光量の小さい環境や、赤外線の反射率の低い対象物の場合、赤外線ステレオカメラによる測距はテクスチャ情報が少ないため測距精度が低くなる。この場合、可視光量は多く、可視光線の反射率は高い対象物であれば、可視光ステレオカメラを用いることでテクスチャ情報が増加し、精度の高い測距が可能になる。一方、赤外線光量が多く、赤外線の反射率の高い対象物であり、可視光量は少なく、可視光線の反射率は低い対象物であれば上記と逆の状況になる。
【解決手段】赤外線ステレオカメラ(3)と可視光ステレオカメラ(5)とを両方具備し、周辺の光量もしくは相関演算の一致度評価値に応じて上記2つのカメラを切替えることにより、周辺光量の変化による測距精度のばらつきが低減される。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
【課題】距離画像の画像ファイルのデータ量を効率よく低減撮影者が所望とする量子化方式により距離値Xi,Yi,Ziを変換することができることとなる。できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
【課題】距離画像の画像ファイルのデータ量を効率よく低減できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
141 - 160 / 331
[ Back to top ]