
Fターム[2F112FA41]の内容
Fターム[2F112FA41]に分類される特許
1 - 20 / 331
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
物体検出装置を搭載する移動体

【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
合焦位置を決定する方法及びビジョン検査システム
【課題】試料位置と合焦位置との間の差分を求める方法を提供する。
【解決手段】試料を示す画像データを獲得するステップと、獲得データから特徴セットを抽出するステップと、画像データ特徴を位置差分値に関連付けるように教え込まれた機械学習アルゴリズムを用いることにより、特徴セットを位置差分値に分類するステップとを含み、位置差分値が差分に対応する。任意に、特徴セットは対比特徴のサブセットを含みうる。任意に、対比特徴のサブセットは、画像データに基づく二乗勾配関数、画像データに基づくウェーブレット関数及び画像データに基づく自己相関関数、例えば、VollathのF4関数若しくはVollathのF4関数とVollathのF5関数との組合せ、全画像データの分散及び並びにLaplaceベースの焦点測定からなる群より選択されうる。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】多眼方式の撮像装置で取得された画像群から、主被写体と背景を含む距離画像を提供する。
【解決手段】本発明に係る画像処理装置は、合焦位置が異なる複数の光学系を有する多眼方式の撮像装置によって撮像された複数の画像を取得する画像取得部(401)と、撮像装置によって撮像された複数の画像それぞれについて合焦画像となる領域を選択する合焦画像選択部(404)と、合焦画像選択部で選択された複数の合焦画像を使用して距離を算出する距離算出部(405)と、を備えたことを特徴とする。
(もっと読む)
測距システム、画像処理装置、コンピュータプログラム及び測距方法
【課題】撮影部と表示部とを有する携帯端末で、それらの端末間の距離を計測する測距システムを提供する。
【解決手段】 測距システム(100)は、所定の時系列で所定の図形を表示する表示部(51B)を有する計測対象物(50B)と、所定の図形を撮影する撮影部(53A)と、撮影部(53A)により撮影された所定の図形と予め記憶された所定の図形の設計値とに基づいて、計測対象物から撮影部までの距離を計測する距離計測部(576)と、を備える。
(もっと読む)
距離測定装置及びプログラム
【課題】異なる波長特性を有する複数の撮像手段を用いて、特定の対象物までの距離を精度よく測定することができるようにする。
【解決手段】各々感度を有する波長帯が異なる第1撮像装置12及び第2撮像装置14によって、各々異なる視点から所定領域を撮像する。対象物抽出部32によって、撮像された撮像画像の各々から、人間の肌についての光の波長帯の各々の反射強度に関する予め定められた条件に基づいて、人間の肌領域を抽出する。位置合わせ部34によって、撮影画像の各々から抽出された人間の肌領域の位置合わせを行って、人間の肌領域における視差量を算出する。距離測定部36によって、算出された視差量に基づいて、人物までの距離を測定し、分光データ生成部38によって、人間の肌領域の分光データを生成する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】多重解像度戦略を用いた対応点探索処理において信頼度が局所的に悪化した場合における総合信頼度を改善する。
【解決手段】画像処理装置は、複数の階層にわって複数の解像度で階層的に表現された複数の基準画像と複数の参照画像とを取得する取得部と、注目点を複数の基準画像にそれぞれ設定する設定部と、注目基準画像の注目点に対応した注目参照画像の対応点を探索する対応点探索処理を各階層において逐次行なう探索部と、各階層における対応点探索処理の結果に関する各信頼度を決定する決定部と、各信頼度の全体的な状況を表現した基準値を、互いに隣接した各階層組みのそれぞれの間にわたる各信頼度についての各信頼度変化のうち一部の信頼度変化を他の信頼度変化よりも強調した補正値を用いて補正することにより、各信頼度を総合した総合信頼度を算出する演算部とを備える。
(もっと読む)
距離測定装置
【課題】 反射光の受光レベルが飽和状態となるときでも精度良く距離を測定できる距離測定装置を提供する。
【解決手段】 距離測定装置の発光部は、測定光を被測定物に向かって出射する。受光部は、被測定物から反射される反射光を受光する。距離算出部は、測定光が出射されたときから反射光の受光レベルがピークを示す時点までの経過時間に基づいて被測定物までの距離を求める。距離補正部は、受光レベルが飽和状態となりピークの時点が特定できないときには、受光レベルが飽和している時間の長さに応じて被測定物までの距離の値を補正する。
(もっと読む)
測距装置
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
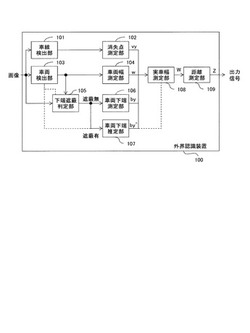
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
測距方法及び到達時間算出方法
【課題】赤外線カメラによる測距方法を提供する。
【解決手段】赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの赤外線熱画像を2値化し、2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、目標の候補を抽出し、設定された各ウインドウ内に含まれる画素について輝度値を積算し、目標候補が放つ熱量相当の輝度を算出し、輝度の積算値がフレーム毎に増加しているウインドウを選択して、目標を抽出し、目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
(もっと読む)
車載カメラの光軸変動量の測定方法
【課題】車両に搭載されたステレオカメラの温度変化による光軸変動量を精度良く測定する車載カメラの光軸変動量の測定方法を提供する。
【解決手段】第1カメラを回転位置が180度異なる通常位置と反転位置とに切り替えて、基準温度における第1カメラ及び第2カメラの撮像画像間でのターゲットの画像部分の視差である第1視差と第2視差を算出する第1,第2視差算出工程と、特定温度における第1カメラ及び第2カメラの撮像画像間での前記ターゲットの画像部分の視差である第3視差と第4視差を算出する第3,第4視差算出工程と、第1視差と第3視差の差分及び第2視差と第4視差の差分に基づいて、特定温度に変化したときの第1カメラ及び第2カメラの光軸変動量を算出する光軸変動量算出工程とを含む。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
撮像モジュール、撮像装置、画像処理装置及び画像処理方法。
【課題】 複数の光学ユニットを有する撮像モジュールにおいて鏡面反射による影響を抑制することを目的としている。
【解決手段】 複数の光学ユニットを有する撮像モジュールであって、複数の光学ユニットのうちの少なくとも一部の光学ユニットに対して偏光フィルタを備え、偏光フィルタを備える光学ユニットにより得られる画像データに基づいて、被写体までの距離情報を推定する。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
1 - 20 / 331
[ Back to top ]