
Fターム[2F112GA00]の内容
光学的距離測定 (16,745) | 他 (1,081)
Fターム[2F112GA00]の下位に属するFターム
Fターム[2F112GA00]に分類される特許
1 - 1 / 1
マシンビジョンを用いたオブジェクトの3次元アライメントのためのシステムと方法
本発明はモデル化されたオブジェクトまたはシーンの3次元アライメントを決定するためのシステムおよび方法を提供する。校正後、3D(ステレオ)センサスシステムはオブジェクトを観測して、当該オブジェクトを包含するシーンの実行時3D表現を導出する。各ステレオヘッドからの修正画像は、それらのエッジ特徴を強調するために前処理される。次に少なくとも2個(1対)の前処理された修正画像で、所定の特徴を最初の画像上に特定し、次いで同じ特徴を別の画像中に特定することによりステレオマッチングプロセスが同時に実行される。各対のカメラについて3Dポイントが計算されて3Dポイントクラウドが導出される。3Dポイントクラウドは各カメラ対の3Dポイントをワールド校正からワールド3D空間に変換することによって生成される。ポイントクラウドからの3Dデータの量は、より高水準の幾何学形状(HLGS)、たとえば線分を抽出することによって削減される。実行時に検出されたHLGSがモデルのHLGSに対応させられて、候補3D姿勢を生み出す。粗い採点で姿勢の数を減らす。さらに残った候補姿勢は一層精緻なプロセスに入れられる。次にこれらの残った候補姿勢は、たとえば候補姿勢の検出された3Dまたは2Dポイントをより大きいセットの対応する3次元または2次元モデルポイントに適合させることによって検証され、その場合に最も近いマッチが最良の精緻な3次元姿勢である。 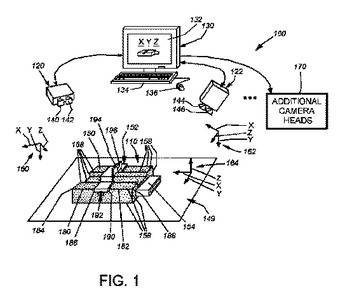 (もっと読む)
(もっと読む)
1 - 1 / 1
[ Back to top ]