
Fターム[2F129AA01]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 地上航行体 (14,245)
Fターム[2F129AA01]の下位に属するFターム
Fターム[2F129AA01]に分類される特許
21 - 40 / 55
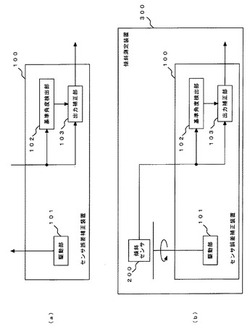
センサ誤差補正装置及び方法、傾斜測定装置並びにアンテナ制御システム
【課題】微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供する。
【解決手段】センサ誤差補正装置100は、傾斜センサ200を設置平面内で回転させる駆動部101と、傾斜センサ200の出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサ200の出力を補正する出力補正部103とを有する。
(もっと読む)
案内表示装置

【課題】既存の非接触情報媒体を利用して、簡単な構成により低コストで、且つより簡便な操作で、利用者が所望の施設に関する施設利用情報を取得することができるようにした案内表示装置を提供する。
【解決手段】表面に施設表示部11bを有する地図等の案内図11aを備えた板状のパネル部11と、パネル部11の案内図における各施設表示部11bに隣接して配置され、ユーザがかざした非接触情報媒体14を検出したとき、非接触情報媒体に当該施設表示部に関する施設利用情報を書き込むリーダ・ライタ部12と、を備えるように、案内表示装置10を構成する。リーダ・ライタ部12が、非接触情報媒体に施設利用情報を書き込むとき、同時に、現在位置情報、案内表示装置識別情報、施設表示部に関連する目標位置情報の何れかを、非接触情報媒体に書き込んでもよい。
(もっと読む)
GPSデータ処理装置
【課題】複数のGPS基準局からの補正情報を選択的に切替えながら取得して相対測位をした場合に、各GPS基準局の設置位置誤差によって移動局での測位で得られた経路が不連続にならないGPSデータ処理装置を提供する。
【解決手段】GPS基準局の各々の設置誤差データを記憶すると共に、GPS受信機で算出された移動局の位置データに対し、受信しているGPS基準局の設置誤差データで修正演算する位置修正演算装置と、この修正演算結果を表示するモニタ装置を備える。GPS受信機はGPS衛星から受けたGPS情報と切替えられたGPS基準局から受けた補正情報とから移動局の位置データを算出し、前記位置修正演算装置は前記算出された位置データに対し、切替えられて受信しているGPS基準局の設置誤差データで修正演算して位置データを得る。
(もっと読む)
情報受信装置
【課題】情報提供サービスにおける変更を報知することができる情報受信装置を提供すること。
【解決手段】情報提供サービスにより提供され、前記情報提供サービスを識別する識別コード、及びサービス形態コードを含む情報を受信する受信手段11と、利用可能な情報の識別コード及びサービス形態コードを記憶する記憶手段9と、前記受信手段11で受信した情報に含まれる前記識別コード及び前記サービス形態コードと、前記記憶手段9に記憶された、利用可能な情報の前記識別コード及び前記サービス形態コードとを対比する対比手段8と、前記対比手段8による対比において、前記識別コード及び/又は前記サービス形態コードが一致しない場合に報知を行う報知手段10と、を備えることを特徴とする情報受信装置。
(もっと読む)
位置姿勢推定システム、位置姿勢推定装置、および位置姿勢推定方法
【課題】センシングデータリストに基づくマッチング方法において、さらなる計算量の削減を実現すること位置姿勢推定システム10を提供する。
【解決手段】本発明の位置姿勢推定システム10は、参照データ群を作成する手段150において、第1の参照データ群103を環境地図101から作成する処理102と、第2の参照データ群105を第1の参照データ群103の差分処理により作成する処理104とを行い、位置姿勢を推定する手段170において、センシングデータ107に基づいて、第1の参照データ群103および第2の参照データ群105の中から必要なデータを選択する処理120と、選択された複数の参照データと前回作成した評価のためのデータ122とを加算することで新たな評価のためのデータ122を作成する処理121と、評価のためのデータ122から位置姿勢推定値124を求める処理123とを行う。
(もっと読む)
空間安定装置
【課題】従来の空間安定装置は、出力角度を使用する制御ループの精度を向上させるために、分解能の高い角度センサを使用する必要があり、コスト高になってしまう。
【解決手段】本発明による空間安定装置は、制御手段11が、角速度センサ7の出力角速度(θ/t)を積分することで変化角度(Δθ)を求め、角度センサ8の出力角度(θ)が1単位変化する間の角度を変化角度(Δθ)によって補間するとともに、前記出力角度(θ)が1単位変化する毎に前記変化角度(Δθ)をリセットする構成である。
(もっと読む)
経路探索システム、経路探索方法、及び自律移動体
【課題】経路探索空間が広い場合であっても、高速で最適な経路を探索可能な経路探索システム、経路探索方法、及び自律移動体を提供すること。
【解決手段】本発明にかかる経路探索システムは、移動始点から移動終点に到達する自律移動体の移動経路を探索する経路探索システムであって、移動領域を複数の領域に分割する領域分割部111と、領域分割部により分割された複数の領域に対応し、それぞれの領域の評価値を算出する複数の評価値算出部112と、評価値算出部112によって算出された評価値に基づいて経路を決定する経路決定部113とを備え、評価値算出部112が、近傍に存在する領域の評価値と、当該近傍領域から自領域までの移動コストに基づいて評価値を算出する評価値処理部114を有するものである。
(もっと読む)
地図データ更新システムおよびアダプタ装置
【課題】ナビゲーション装置に地図データ更新用のUSBインタフェースを設けることなく地図データの更新を行う地図データ更新システムを提供する。
【解決手段】地図データ更新システムは、地図データに基づき経路探索を行うナビゲーション装置1と、最新の地図データを有する地図データ更新装置2とから成り、ナビゲーション装置1が主体的に動作する外部接続装置のスロットに接続され、一端が外部接続装置の接続インタフェース11(12)に、他端が地図データ更新装置2の接続インタフェース(USB)にそれぞれ準拠したコネクタ構造を有するケーブル(7、8)を備え、外部接続装置のインタフェース11(12)を介して地図データ更新装置2から最新の地図データを前記ナビゲーション装置へ転送するアダプタ装置3、を備えて構成される。
(もっと読む)
位置特定システム
【課題】位置特定システムにおいて、データの送受信を効率よく行う。
【解決手段】移動局は、位置を特定する情報(位置情報)を生成して、統制装置に送信する。統制装置は、移動局から受信した位置情報から基準位置を導出して、移動局に送信する。移動局は、生成した位置情報および統制装置から受信した基準位置から、移動局の基準位置に対する相対的な位置を特定して、特定した相対的な位置を移動局間で通信する。このように移動局の間では、位置情報よりも少ない情報量の情報が通信されて、移動局は、他の移動局の位置を特定することができる。
(もっと読む)
移動ロボット、自己位置補正方法および自己位置補正プログラム
【課題】演算量の増加を抑えつつ、正確に自己位置を推定することのできる移動ロボットを提供する。
【解決手段】自律移動可能な移動ロボット1であって、自己位置を推定する自己位置推定部16と、移動ロボット1が移動可能な領域を点集合データで示す環境地図を保持する環境地図保持部181と、移動ロボット1の周囲の移動可能な領域を検知する経路センサ17と、経路センサ17による検出結果を点集合データで示す周囲環境情報を生成する周囲環境情報生成部184と、環境地図中の対応点データの候補を、周囲環境情報中の所定の点データを基準として予め定められた閾値以下の距離の領域に存在する点データに限定する検索対象点限定部186と、限定された点を所定の点データに対する対応点データとして、環境地図中の各点データと、周囲環境情報中の対応点データとの間の位置ずれ量分自己位置を補正する位置補正部188とを備えた。
(もっと読む)
メニュー表示装置
【課題】ナビゲーション装置等の装置の機能や実行させる処理内容をメニューとして画面に表示するときに、選択項目を階層化された分類構造に従って分類分けされた状態で表示するとともに、感覚的に把握することができるように表示することによって、必要な選択項目を容易に見つけ出すことができるようにする。
【解決手段】選択すべき階層の分類項目とより上位の階層の選択が確定した分類項目とを同時に表示し、選択すべき階層の分類項目が選択されると、選択された分類項目をより上位の階層の選択が確定した分類項目と同様の位置に表示し、選択すべき階層の分類項目の選択が確定すると、より下位の階層の分類項目であって選択が確定した分類項目に属する分類項目、及び、より上位の階層の選択が確定した分類項目であって選択が確定した分類項目を含む分類項目を同時に表示する。
(もっと読む)
センサ移動計画システム
【課題】全ターゲットについて総合的に誤差を小さくするのに適した移動方向を算出できるセンサ移動計画システムを得る。
【解決手段】センサ管理部2は、ターゲットからの信号を受信したセンサから受信波形を獲得する受信波形獲得機能25と、受信波形の観測時刻におけるセンサの位置を獲得する位置情報獲得機能24と、2つのセンサの受信波形を照合してセンサペアのターゲットまでの距離差及び相対速度差を求める受信波照合機能26と、前記距離差及び相対速度差を満たす、ターゲットの観測位置及び観測速度を算出する整合算出機能27とを有し、ターゲット管理部1は、ターゲットの観測位置及び観測速度から将来の時刻におけるターゲットの推定位置及び推定速度を算出する推定機能13を有し、センサ行動算出部3は、各センサについて、位置及び速度誤差改善ベクトルを総合した誤差改善ベクトルを算出し、次の時刻におけるセンサの位置を決定する改善方向決定機能31とを有する。
(もっと読む)
更新用ナビデータ生成機能付きテレビジョン受信機
【課題】ナビゲーション装置における地図付加情報(ナビデータ)の更新を、簡単且つ低コストに行えるようにすることを目的とする。
【解決手段】テレビジョン装置でデータ放送が選局されると(S1)、その番組放送に含まれるメタデータを分離し(S2)、そのコンテンツに所定のキーワード(住所や電話番号等)が含まれているメタデータを検出し(S3)、そのメタデータを更新用のナビデータとして作成する(S7)。システムにナビゲーション装置が接続されている場合は(S8/Y)、作成した更新用ナビデータをそのナビゲーション装置に送信し(S9)、システムにナビゲーション装置が接続されていない場合は(S8/N)、作成した更新用ナビデータをレコーダに送信する(S10)。
(もっと読む)
移動体用放送受信装置
【課題】選局可能な放送信号の識別情報が登録されたプリセットデータを複数記憶し、その中から現在地に適したデータを簡単に選択し得る移動体用放送受信装置を提供する。
【解決手段】デジタルテレビ受信制御部48は、プリセットデータの生成指令を受けると、チューナ部42にて選局可能な全放送信号の放送チャンネルを検索し、その放送チャンネルをプリセットデータとして、車両の位置情報や日時情報と共にメモリ部46に格納する。また、プリセットデータの選択指令を受けると、メモリ部46に記憶されたプリセットデータを位置情報及び日時情報と共に一覧表示し、その表示画面上で選択されたプリセットデータを選局用として設定する。また、プリセットデータの自動切換が設定されているときは、メモリ部46に記憶されたプリセットデータの中から、位置情報が車両の現在位置に最も近いプリセットデータを検索し、これを選局用として設定する。
(もっと読む)
交通情報配信装置
【課題】通信情報量を削減して通信コストの低減化を図ることが可能となると共に、予測交通情報を正確に配信することが可能となる交通情報配信装置を提供する。
【解決手段】情報配信センタ3のCPU11は、ナビゲーション装置2から送信された予測交通情報を要求する要求コマンドと共に、ナビ識別ID、自車位置の座標データ、目的地の座標データ等の各車両情報を受信した場合には、更新用地図情報14Aに基づいて、基本ルートを探索し、また、各交通情報16A、16B、16Cの送信対象となる配信範囲を設定する(S111〜S112)。そして、CPU11は、この配信範囲内に対応する渋滞予測情報等の予測交通情報16Cを作成し、この作成した予測交通情報16Cと現況交通情報16Aとが異なる各リンクの予測交通情報16Cを抽出して、対応する各リンクのリンクIDと共にナビゲーション装置2へ配信する(S113〜S115)。
(もっと読む)
経路情報表示装置および経路情報表示方法
【課題】道路をポリゴンにて表した道路ポリゴンにて成る地図データのみにて経路情報の補正を行い適切に表示することが可能な経路情報表示装置を提供する。
【解決手段】リンクノードと始点と終点とにて成る経路情報を外部から入力して地図データ上に表示する経路情報表示装置2において、道路をポリゴンにて表した道路ポリゴンにて成る地図データが格納されている地図データベース15と、経路情報を外部から取得する取得手段13と、経路情報のリンクノードから所定距離分の経路が地図データの道路ポリゴンの領域内か領域外かを判断し領域外であると判断するとリンクノードから所定距離分の経路が地図データの道路ポリゴンの領域内と成るようにリンクノードの位置データを補正して補正経路情報を作成する経路補正手段21と、地図データおよび地図データ上に補正経路情報を描画する描画手段14とを備えたものである。
(もっと読む)
データ入力装置、データ入力システム、データ入力方法、印刷装置および印刷物
【課題】入力の間違いがなく、使い勝手が良いデータ入力装置およびデータ入力システムを提供すること。
【解決手段】データ入力装置は、コードが埋め込まれた画像を撮影し、該画像に埋め込まれたコードを抽出し、該コードをコードと位置データを対応付けて格納したID管理サーバに送信する。ID管理サーバは、受信したコードに対応する位置データをデータ入力装置に送信する。データ入力装置は、受信した位置データをナビゲーション装置に送信する。
(もっと読む)
車載用電子機器,及びデータ送受信プログラム
【課題】運転中の危険が増加することなく情報処理装置と車載用電子機器とのデータ送受信を行う。
【解決手段】車両に搭載される車載用電子機器において,車両に携行される情報処理装置と接続される接続手段と,前記情報処理装置からのデータ送受信要求に応答して前記情報処理装置とデータ送受信を実行するデータ送受信手段と,前記車両の走行状態と停止状態を検知する車両状態検知手段とを有し,前記データ送受信手段は,前記車両が停止状態のときに前記情報処理装置とのデータ送受信を実行し,前記車両が走行状態のときは前記情報処理装置とのデータ送受信を実行しない。
(もっと読む)
自律移動装置
【課題】本発明は、測定面上の距離測定装置から遠い位置の形状を測定する際にも解像度の低下を抑制することができる自律移動装置を提供することを目的とする。
【解決手段】本発明の自律移動装置18は、距離データを測定するレーザレンジセンサ20と、レーザレンジセンサ20を回転させる回転装置30と、回転装置30が搭載される移動体16と、回転装置30の回転角を検出するエンコーダ38と、レーザレンジセンサ20とエンコーダ38から入力されるデータを用いて3次元距離データを演算する演算部52aと、回転装置30を制御する回転制御部52bを有しており、回転制御部52bは、床面形状測定時に、床面上のレーザレンジセンサ20から遠い位置にレーザを走査するときは、床面上のレーザレンジセンサ20から近い位置にレーザを走査するときに比べて遅い角速度で回転装置30を回転させる。
(もっと読む)
移動体のキャリブレーション装置およびこれを搭載した移動体並びにキャリブレーション方法
【課題】簡単な構成の装置で移動体の運動学パラメターを精度よく求めることができ、かつキャリブレーション作業に要する手間と空間を大幅に削減する移動体のキャリブレーション装置と方法および自己キャリブレーション機能を有する移動体を提供する。
【解決手段】モータ回転速度計測部と、移動体の回転速度計測部と、車輪を駆動するモータの回転速度指令を出力するモータ回転速度指令部と、前記モータ回転速度計測部の出力値と前記移動体の回転速度計測部の出力値とから前記移動体の運動学パラメターを得る演算処理部と、を備え、前記モータ回転速度指令部はキャリブレーションにあたって正負対称の定常波指令を一定期間出力するようにした。
(もっと読む)
21 - 40 / 55
[ Back to top ]