
Fターム[2F129AA10]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 宇宙航行体 (27)
Fターム[2F129AA10]に分類される特許
1 - 20 / 27
航空機のための単純化されたユーザインターフェース
【課題】航空機のための単純化されたユーザインターフェースを提供する。
【解決手段】航空機10のための、自動操縦と飛行管理との統合されたシステムのためのユーザインタフェース30が、自動操縦の動作のための複数の戦術的パラメータ制御と、飛行管理システムの動作のための複数の戦略的パラメータ制御とを含む。
(もっと読む)
相互補完ナビゲーションシステム

【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の関数関係を決定。関数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する関数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
軌道決定装置及び軌道決定方法
【課題】 GPS受信機の突発的な出力異常時や、GPS受信機の不使用時にも影響を受けることなく、人工衛星のオンボードでの軌道決定処理を行うことで、軌道決定精度を維持することを目的とする。
【解決手段】 リファレンス軌道データから人工衛星の第1の軌道周期を求めるとともに、上記GPS受信機の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定し、推定された地心半径を元に、人工衛星の軌道決定を行う。
(もっと読む)
慣性航法装置、飛翔体及び航法データ算出方法
【課題】飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供する。
【解決手段】本発明の慣性航法装置Aは、慣性計測器11の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機12と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部14と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部13と、を有するという構成を採用する。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】デジタルテレビ放送で送信される付加情報をナビゲーション情報と関連付けて表示できるナビゲーション装置及び方法を提供する
【解決手段】
デジタルテレビ放送の放送電波を受信する第1のアンテナと、第1のアンテナが受信した放送電波から放送された映像及び音声に付加された付加情報を取得する取得部と、衛星から送信された衛星電波を受信する第2のアンテナと、第2のアンテナが受信した衛星電波に基づいて車両が走行する走行位置を測定する測定部と、取得部が取得した付加情報から位置を表す情報を検出する検出部と、検出部が検出した位置を表す情報に基づいて、取得部が検出した付加情報と測定部が測定した走行位置に基づいて車両の運転を誘導するナビゲーション情報とを関連付けて表示する表示部とを備える。この構成によれば、付加情報を走行位置に基づいてナビゲーション情報と関連付けて表示できる。
(もっと読む)
移動体位置推定システム、移動体位置推定方法、及び移動体位置推定プログラム
【課題】本発明は、移動体の位置情報を検出する際に位置検出遅れが生じても移動体に対して位置情報を高精度に取得可能な移動体位置推定装置を提供する。
【解決手段】移動体位置推定装置1は、移動体が備える位置検出手段からの更新位置信号と移動体が備える加速度などの物理量検出手段からの物理量検出信号に基づき移動体の位置を予測推定した推定信号を出力する移動体位置推定手段(位置推定器18)、位置検出手段の位置検出遅れを補正するため更新位置信号と物理量検出信号の検出時刻に関する対応を図るように移動体位置推定手段の入出力動作、処理動作を制御する補正制御手段10を含む。
(もっと読む)
飛しょう体の誘導方法及び誘導装置
【課題】目標の類別に応じた最適な飛しょう経路を飛行させることのできる飛しょう体の誘導方法を提供する。
【解決手段】目標の位置、速度及び種類を表す情報からなる目標情報を取得するステップと、目標の種類情報に基づき、飛しょう体1が、目標と会合するまでの飛しょう時間を最短とする飛しょう経路、あるいは目標に会合する際の残速を最大とする飛しょう経路のいづれの経路をとるかを選択するステップと、選択した飛しょう経路に対応し、所定の位置に到達するまでの飛しょう時間と発射直後の旋回方向とを表にした射表を取得するステップと、目標の位置と速度と射表とから、目標と飛しょう体とが会合する会合点を算出するステップと、会合点に基づき射表から旋回方向を抽出するステップと、発射直後の飛しょう体の旋回方向が抽出した旋回方向となるように飛しょう体を制御するステップとを備える。
(もっと読む)
地図描画装置及びプログラム
【課題】地図描画を行う際に本来利用すべきデータの一部が取得できていない場合において、取得できていない情報の位置に対応する代替情報が存在しない場合であっても、利用者に対して、その領域に関する地理的な情報を提供する。
【解決手段】地図描画装置1201は、地図データ管理装置1301から受信した地図データにおいて、一部のメッシュの地図データが受信できなかった場合に、利用者が現在移動中の道路と同一名称の同一道路を保持している地図データから抽出し、地図データ管理装置1301から地図データが受信できていない未取得メッシュが介在し現在移動中の道路と同一道路とが分断された状態の地図が表示される場合に、現在移動中の道路と同一道路とを対応付けることにより、現在移動中の道路と同一名称の道路が他の場所に存在することを利用者に情報提供することができる。
(もっと読む)
データ記録装置およびデータ記録方法
【課題】 従来のフライトレコーダなどの記録装置は、メモリに順番にデータを記録していたため、一定期間以上のデータを保存できなかった。
【解決手段】 メモリの記憶領域を複数のブロックに分割し、分割したブロックを1つのブロックから構成されるグループと複数のブロックから構成されるグループとから成る所定数のグループに別けた上で、メモリへのデータ書き込み時に特定グループを順次輪番に選択し、選択した特定グループに属する特定ブロックに入力データを書き込む際、複数のブロックを構成単位とするグループを特定のグループとして選択した場合には、選択されたグループに属する複数のブロック領域の中から、同グループが選択される毎に輪番で、データの書き込みを行うブロックを切り替える。
(もっと読む)
航行体の姿勢検出方法及び装置
【課題】2つのアンテナで航行体の姿勢を求める。
【解決手段】第1アンテナa1及び第2アンテナa2を離間して航行体1に搭載し、複数の測位用衛星S1,S2から発信された電波の各々について、第1アンテナa1及び第2アンテナa2に届く電波の位相差を算出し、各位相差から、複数の測位用衛星S1,S2と、第1アンテナa1と第2アンテナa2を結ぶ線分とがなす角をそれぞれの姿勢角として算出し、求めた複数の姿勢角θ1,θ2を合成することにより航行体1の姿勢を求める。
(もっと読む)
スタートラッカ用ノイズ除去/グルーピング回路
【課題】画像データの連続性が著しく低下する宇宙空間に点在する星のグルーピングを的確に行う。
【解決手段】画像データの二値化データの各画素が縦/横2連結以下なら無効データ、縦/横3連結以上なら有効データと判断するノイズ除去ロジック4と、有効データの画素毎に、周囲の画素との連結状態により、各星に割り当てたグルーピングラベル番号を振り付けるグルーピングロジック5とを含む。グルーピングラベル番号振付けに際し、注目画素と隣接する複数の画素が、異なるグルーピングラベル番号を有する場合があり得るときは、隣接する画素のグルーピングラベル番号の内の最小のグルーピングラベル番号を注目画素のグルーピングラベル番号とする。
(もっと読む)
編隊飛行におけるスター・センサと光学式計測センサとの組合せにより改良された絶対ターゲット・システム
【課題】編隊飛行におけるスター・センサと光学式計測センサとの組合せにより改良された絶対ターゲット・システムを提供する。
【解決手段】本発明は天体観測衛星に組み込まれることを意図している絶対ターゲット・システムに関する。
最高の精度を備える絶対ターゲット・システムを確立するため、本発明はスター・センサ(4)を光学式計測センサ(5N、5R)と連結することを提案する。これら2つのアイテムの装置は特に編成飛行ミッションに対して、通常は衛星に既に搭載されているため、この解決策は追加の重量および費用を加えない。
(もっと読む)
飛翔体の測位装置
【課題】飛翔体が長時間にわたって加速を続けると、信号処理の基準周波数を発生する基準発信器において加速度による周波数ドリフトが生じるという問題があった。
【解決手段】飛翔体に搭載され且つ複数のGPS衛星からの信号を受信して自己の位置を測位する飛翔体の測位装置であって、基準周波数を発生する基準発信器12と、飛翔体に生じた加速度を計測する加速度計13と、加速度計13で計測した加速度に対応する基準発信器の周波数ドリフトを算出する第1補正手段14を備え、第1補正手段14により、算出した周波数ドリフトに基づいて実際に生じた基準発信器12の周波数ドリフトをキャンセルすることで、加速度により生じる基準発信器12の周波数ドリフトを解消した。
(もっと読む)
動的に較正されるセンサデータと、ナビゲーションシステム内の繰り返し拡張カルマンフィルタとを使用する、ジャイロコンパスの整合用のシステム及び方法
【課題】動的に校正されるセンサデータと、ナビゲーションシステム内の繰り返し拡張カルマンフィルタとを使用して、ジャイロコンパスを整合させる。
【解決手段】ナビゲーションシステムは、慣性測定装置及び位置決め装置によって提供される第1及び第2のデータセットを受信するように構成される処理装置を備え、処理装置は、受信された第1のデータセットを動的に較正するように構成され、カルマンフィルタを備え、最初に動的に較正された第1のデータセット、第2のデータセット、及びカルマンフィルタを使用してジャイロコンパスの整合を生成するようにさらに構成される。本方法は、複数のセンサからセンサデータを受信すること、センサデータの少なくとも一部を動的に較正すること、動的に較正されたセンサデータに基づいてジャイロコンパスの整合情報を生成することを含む。
(もっと読む)
センサ融合ナビゲーションのためのシステムおよび方法
【課題】精密なナビゲーションを実施できるナビゲーション・システムを提供する。
【解決手段】ナビゲーション・システムは、複数のナビゲーション・センサを備え、複数のナビゲーション・センサのそれぞれは、剛体の複数の状態(剛体状態)のうちの少なくとも1つについてのデータを提供するように構成され、それによって複数の剛体状態のそれぞれについてのデータが複数のナビゲーション・センサのうちの1または複数のものによって提供されるようにし、複数のナビゲーションセンサのうちの1つがステレオ・ビジョン・センサであり、また、ナビゲーション・システムは、複数のナビゲーション・センサに結合された処理装置を備え、処理装置は、複数の剛体状態のそれぞれについてのデータを統合して、複数の剛体状態のそれぞれについての組合せ状態推定を得るように構成される。
(もっと読む)
軌道決定装置、軌道決定方法、及びコンピュータプログラム
【課題】宇宙機の軌道を、簡易な設備で高精度に求めることができるようにする。
【解決手段】位相差検出装置61は、受信装置40a〜40cにおけるテレメトリ信号30の受信時間差を位相差として検出し、データ解析装置62は、位相差検出装置61で検出されたテレメトリ信号30の位相差の時間変化率を求め、求めたテレメトリ信号30の位相差の時間変化率を用いて、宇宙機20の軌道10を求める。
(もっと読む)
編隊を組む宇宙船グループ内の一宇宙船用の、2周波数信号を解析することによる相対位置制御装置
編隊を組んで移動する宇宙船のグループの、1つの宇宙船(S1)用の制御装置(D)は、
i)宇宙船(S1)の面に設置され、選ばれた周波数ギャップにより隔てられた第一と第二の周波数を示す、第一と第二のRF信号を発信及び/又は受信可能な、3つのアンテナ(A1〜A3)から成る集合体と、
ii)アンテナにより受信され、そして他の宇宙船に由来する第一と第二の信号に基づき、第一の周波数及び周波数ギャップに対応する、アンテナ(A1〜A3)間の、第一と第二の経路長の差を決定する任務を負う第一の測定手段(M1)と、
iii)宇宙船(S1)により経験された回転の測定値を届ける任務を負う、第二の測定手段(M2)と、そして
iv)
a)第一と第二の初期経路長の差に基づき、受信した信号の伝送方向を粗く推算し、
b)前記宇宙船に結び付けられた座標系の選ばれた軸が、粗い伝送方向に対して揃えられるように、宇宙船(S1)の位置調整を指令し、
c)選ばれた軸を中心とした宇宙船(S1)の回転駆動を指令し、
d)回転測定、及びこの回転により引き起こされる第一の経路長の差の変化測定に基づき、他の宇宙船(Si’)により発信された信号の伝送方向を正確に推算する任務を負う、処理手段(MT)とを備える。 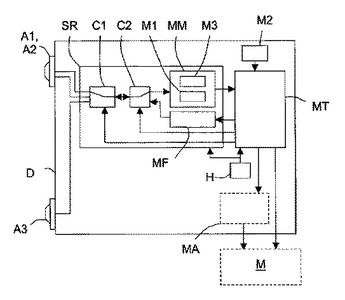 (もっと読む)
(もっと読む)
最小限のオンボード処理による航法システム
【課題】
位置評価を与える航法システムを提供する。
【解決手段】
1つの実施例において、方法は3次元各々で加速度評価を積分することを含む。各次元の速度雑音エラーを決定するために、各次元の積分加速度評価から、各次元のGPS速度を減算する。各次元で速度雑音エラーをフィルタする。各次元の速度評価を得るために、各次元の積分加速度評価にフィルタした速度雑音エラーを加算する。各次元の積分速度評価を決定するために、各次元の速度評価を積分する。各次元の位置雑音エラーを決定するために、各次元の積分速度評価から、各次元のGPS位置を減算する。各次元の位置雑音エラーをフィルタし、各次元のフィルタされた位置雑音エラーを積分速度評価へ加算して、各次元の位置評価を得る。
(もっと読む)
衛星ナビゲーションのための方法及びシステム
【課題】衛星ナビゲーションのためのシステム及び方法を提供する。
【解決手段】一実施形態では、衛星ナビゲーション・システム用のモバイル・ユニットが開示される。このモバイル・ユニットは、衛星ビークルへ要求無線信号を送信する手段と、1又は複数の衛星ビークルの軌道座標を含む応答無線信号を受信する手段と、要求無線信号を送信する手段と応答無線信号を受信する手段とに応答するものであり、送信された要求無線信号と受信された応答無線信号とに基づいて到来時間差レンジを計算することにより、衛星ビークルまでのレンジを計算する手段と、レンジを計算する手段に応答するものであり、少なくとも3つの衛星ビークルまでのレンジと少なくとも3つの衛星ビークルの軌道座標とに基づいて位置を計算する手段とを備える。
(もっと読む)
回転数検出装置及び回転飛翔体
【課題】 外乱の影響を受けることなく、正確に回転飛翔体の回転数を検出することを目的とする。
【解決手段】 回転体が回転することによって生じる遠心加速度と重力加速度とを検知すると共に当該遠心加速度と重力加速度との合成加速度に応じた加速度検出信号を出力する加速度検出手段と、前記加速度検出信号の変動周期に基づいて前記回転体の回転数を検出する信号処理手段とを具備する、という手段を採用する。
(もっと読む)
1 - 20 / 27
[ Back to top ]