
Fターム[2F129AA13]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 水上/水中航行体 (265)
Fターム[2F129AA13]の下位に属するFターム
Fターム[2F129AA13]に分類される特許
1 - 20 / 20
移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム
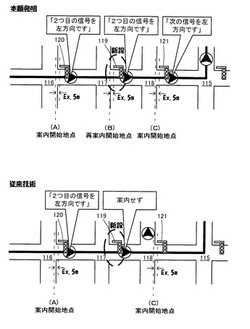
【課題】信号機が増加した付近において信号機を用いた案内分岐点を特定させる案内を行った場合であっても、案内分岐点をユーザに正確に特定させることを可能にした移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラムを提供する。
【解決手段】車両の進行方向前方に案内分岐点が有る場合に、バックカメラ19を用いて車両の周辺にある停止線の路面標示を検出した検出結果を取得し、案内分岐点の手前側にある手前信号機に対応して設置された停止線と異なる位置で停止線を検出した検出結果を取得した場合に、直前に案内された内容と同内容の案内を案内分岐点の案内として再度出力するように構成する。
(もっと読む)
水中航走体用船上管制装置の表示方法

【課題】 水中航走体の航走状態の把握を容易にする。
【解決手段】 船上管制装置のディスプレイ1に、水平面投影像表示部2、X軸方向鉛直面投影像表示部3及びY軸方向鉛直面投影像表示部4を備える。水平面投影像表示部2には、表示対象領域内に存在する表示対象となる水中航走体AUVとその軌跡11、母船MV、ウェイポイントP1,P2,P3,P4の三次元空間内での位置を水平面に投影した像の位置を表示させる。X軸方向鉛直面投影像表示部3とY軸方向鉛直面投影像表示部4には、各表示対象の三次元空間内での位置を、水平面投影像表示部2における横方向であるX軸と、縦方向であるY軸にそれぞれ沿う鉛直面に投影した像の位置を表示する。水中航走体AUVとその軌跡11、母船MV、ウェイポイントP1,P2,P3,P4の三次元空間での相対的な位置を、三面図と同様に表示して立体的に捉えることができるようにさせる。
(もっと読む)
タッチスクリーン付きナビゲーション装置
【課題】地図データベースと、ユーザ定義地点間の経路計画を可能にするソフトウェアとがプログラムされているナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、コア機能のセットに属する任意の機能と、指を使用して確実に起動できるのに十分に大きい非重複タッチ入力ゾーンとを関連付けることが可能となるようにプログラムされている。コア機能のセットを識別することが可能となり、かつ確実な起動のために十分に大きいタッチ入力ゾーンに指でタッチすることによって確実に、それらのすべてを選択/起動することができることを可能にする。
(もっと読む)
水中用案内装置
【課題】 ダイバーのダイビングポイントに向かう遊泳を補助する。
【解決手段】 緯度及び経度方向の移動量を計測する慣性航法装置3と、その移動量の計測開始地点の位置座標、及び、エントリーポイントの位置座標を入力する入力手段4と、方位計5と、深度計6と、目的地とするダイビングポイントの位置座標と深度の情報を記憶するデータ記憶部7と、これらに接続した演算処理装置2と、この演算処理装置2より出力される各種情報を表示する表示部8を、格納容器9に収納して水中用案内装置1を形成する。慣性航法装置3による移動量の計測開始地点の位置座標に慣性航法装置3で求めた移動量を加える演算により検出される現在位置と、データ記憶部7に記憶してある目的地とするダイビングポイントの位置座標との差分から、ダイビングポイントへ向かうための方向及び距離を演算し、その方向及び距離と、ダイビングポイントの深度を、表示部8に表示させる。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
自律運転乗物用の制御及びシステム
ナビゲーション及び制御システムは、乗物の位置及び進行方向を示すポジション信号を生成するように構成される1つ以上のポジションセンサを含む。このシステムは、入力を有し、乗物の動作を制御する出力を生成する1つ以上の動作制御機構を含み、動作制御機構から離れた内蔵式自律型制御器を含む。自律型制御器は、ポジションセンサからポジション信号を受信し、乗物の更新された移動経路を定める動作制御信号を生成するように構成されるプロセッサと、ポジションセンサ、動作制御機構、及びプロセッサの間で通信を行うプログラマブルインタフェースとを含む。プログラマブルインタフェースは、ポジションセンサからのプロセッサへの入力を正規化し、動作制御機構への入力として加えられる適合する動作制御信号を生成するように構成され、それによって内蔵式自律型制御器は、様々な異なるセンサ及び異なる動作制御機構と共に動作するように構成可能である。  (もっと読む)
(もっと読む)
水中移動体の位置検知装置
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
水中ナビゲーションの方法およびシステム
【課題】水中ナビゲーションの方法を提供する。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
(もっと読む)
情報表示装置、及び、情報表示方法
【課題】低コストで実現可能な装置により、潜水中のダイバーが、簡単な操作によって帰路の方向を確実に確認できるようにする。
【解決手段】防水性を有するケース21に収容され、各種情報を表示する液晶表示パネル211を備えた表示部と、ケース21の外部から操作可能なスイッチ23と、を備えたダイブコンピュータ2により、進路の方位を検出し、スイッチ23により方位設定を指示する操作に応じて、検出した方位を往路の方位として設定し、この往路の方位に基づいて帰路の方位を求め、求めた帰路の方位を液晶表示パネル211に表示する。
(もっと読む)
ナビゲーション関連データ用の音声パッケージ
【解決手段】 本明細書では、位置決定装置用の音声データを柔軟かつ動的に作成および/または修正できるようにする技術について説明している。一部の実施形態では、言語データベースおよび複数の音声ファイルを含む音声パッケージが提供される。前記言語データベースは、前記位置決定装置により音声出力することを意図する情報について、適切な構文および語彙を指定する。前記音声ファイルは、前記位置決定装置からアクセス可能な語(word)および/または句(phrase)を含み、前記情報が聴覚的出力により伝達される。一部の実施形態では、音声パッケージツールキットを利用して、音声パッケージの1若しくはそれ以上の部分が構築および/またはカスタマイズされる。
(もっと読む)
ナビゲーション装置および方法
本発明は、ユーザに目的地を選択させるように構成される入力インタフェース(220、240)と、プロセッサ(210)と、前記プロセッサによって制御可能なディスプレイ(240)と、を備え、前記ナビゲーションデバイス(200)は、建物データの格納場所(230)と、前記建物データは、複数の目的地のそれぞれにおける建物の形状を表し、前記ユーザにより選択された目的地に対する、前記格納場所(230)に格納された建物データから、前記ユーザにより選択された目的地における建物の三次元表現(401)を生成する目的地ビュー生成モジュール(490)と、をさらに備え、前記プロセッサ(210)は、前記目的地ビュー生成モジュール(490)に応答して前記ディスプレイ(240)を制御し、前記三次元表現(401)を前記ユーザに表示することを特徴とするナビゲーションデバイス(200)に関する。 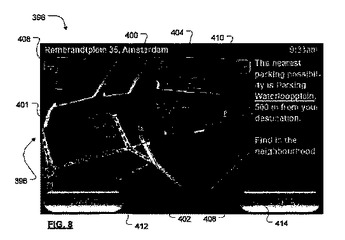 (もっと読む)
(もっと読む)
ナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム及び水中システムの位置及び姿勢を測定する方法
【課題】水中の装置の位置を測定するにつき、水中での音波の屈曲により測定値の不正確が生ずる。
【解決手段】音響アレイに音速メータを備え、音響アレイによる出力データを処理構成で計算して水中の装置の位置を求めるとともに、船の直下の流体層内の音の速度を音速メータで測定して、これにより、処理構成が水中の装置の位置の計算を補正して、正確な位置を検出する。
(もっと読む)
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 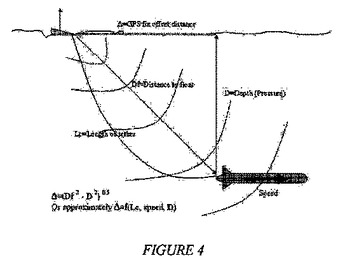 (もっと読む)
(もっと読む)
全地球型衛星航法システム
第1および第2の衛星航法システム(NSS)の各々は、第1のおよび第2の仕様によってそれぞれ作動するのに適している。また、各々は第1および第2の複数の衛星ビークル(SV)をそれぞれ含んでいる。第1および第2の複数のSV各々は、第1および第2の複数のユニークな対応する識別子(ID)によってそれぞれ識別されるのに適合されている。プロセッサは、第1の複数のユニークな対応するIDに応じて第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するのに適している。プロセッサは、第2の複数のユニークな対応するIDに応じて第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するのに適合されている。プロセッサは、第1の複数の通信信号および第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するのに適合されている。 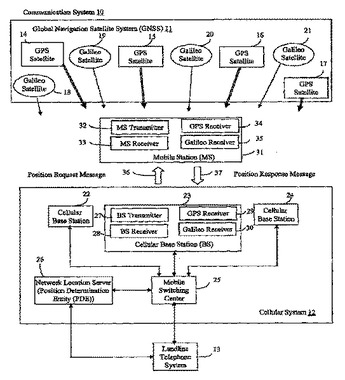 (もっと読む)
(もっと読む)
電界検出方法、装置及び電界検出方法のプログラム並びに移動体位置等推定検出方法、装置及び移動体位置等推定検出方法のプログラム
【課題】海中等において、自然に発生する(浮遊)ノイズの影響に対処し、所望の物体、事象等に基づいて生じる電界を高精度に検出できる方法等を提供する。
【解決手段】電界を3軸方向の各成分で検知する電界検知器1と、磁界を3軸方向の各成分で検知する磁界検知器2と、海水の速度を3軸方向の各成分で計測する潮流計3と、各成分で検知した地磁気に基づく磁束密度及び海水の速度に基づいて、発生する誘導起電力に基づく演算を行って電界浮遊ノイズデータを生成する誘導起電力推定器6と、電界浮遊ノイズデータにより、電界に基づくデータを補正する電界信号データ補正部9aとを備えている。
(もっと読む)
移動体デジタル放送受信システム及び移動体デジタル放送受信システムを有する車両
【課題】移動体デジタル放送受信システムにおいて、移動体の移動中に視聴できなかったデジタル放送のコンテンツのシーンを迅速に頭出し再生することを可能とする。
【解決手段】移動体デジタル放送受信システム10は、デジタル放送を受信する車載デジタル放送受信機16と、GPS信号中の位置情報を取得するナビゲーションユニット20と、前記車載デジタル放送受信機16により受信したデジタル放送のコンテンツとナビゲーションユニット20により取得した位置情報とを関連づけて合成データ格納データベース60に記録するとともに再生を制御する記録再生制御部28とを備える。
(もっと読む)
GPSをダイバー及び水中ビークルへ拡張するシステム及び方法
ナビゲーションシステムは、衛星ナビゲーションをダイバーまで拡張する。ナビゲーションシステムは、水上装置及び複数の水中ビーコン装置を具備する。水上装置は、地球軌道周回衛星からのナビゲーション信号を受信するための受信機と、複数の水中ビーコン装置と通信し、前記水中ビーコン装置へ位置情報を送信するための処理回路と、水中ビーコン装置へ位置情報を送信するためのソナー送信機とを含む。ビーコン装置は、水上装置から受信される位置情報に基づいてビーコン装置の位置を判定するための処理回路と、水上装置が水面で浮遊している間に水上装置から位置情報を受信し、ダイバー装置に対してナビゲーション補助を実行するためにダイバー装置へ位置情報を送信するためのソナートランシーバとを含む。 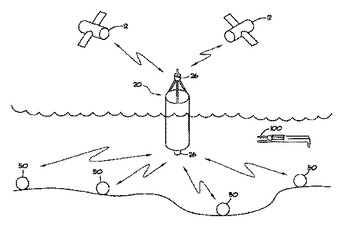 (もっと読む)
(もっと読む)
ダイバー用ナビゲーション支援
ダイバー・ユニットは特定の目標物への距離と方向とを算出する。目標物が障害に遮られている場合、ダイバー・ユニットは別のダイバー・ユニットからナビゲーション支援データを受け取る。ナビゲーション支援データは両ダイバー・ユニットを結んだ共通の基準に対する方向の情報を含む。 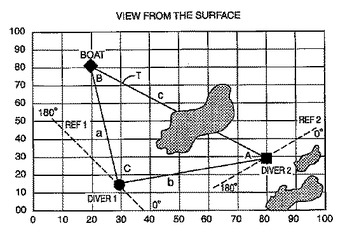 (もっと読む)
(もっと読む)
水中位置検出システム、音源装置、水中位置検出装置、および水中位置検出方法
【課題】 ダイバーが自分の位置を把握しながら散策でき、水底に装置を設置する必要がなく、各装置の小型化を実現し、各装置が信号を送受信するために費やす時間を低減することが可能な水中位置検出システム、装置および方法を提供することを目的とする。
【解決手段】 音源装置は、外部の測位手段からの測位情報を取得する手段と、自己の位置を算出する手段と、自己の位置を重畳して所定強度の音波として水中に照射する音源とを備え、水中位置検出装置は、照射された音波を取得する手段と、取得した音波に重畳された音源装置の位置を得る処理と、音波の強度に基づいて音源装置までの距離を得る処理とを行うことで、複数の音源装置の位置および複数の音源装置までの距離を取得する手段と、取得した複数の音源装置の位置および複数の音源装置までの距離に基づいて所定の測位処理を行うことで、自己の位置を取得する手段と、を備える。
(もっと読む)
測定及び記憶された重力傾度を用いて慣性航法測定値の精度を改善する方法及びシステム
【課題】 重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムを提供する。
【解決手段】 一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。その方法の一実施形態は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
(もっと読む)
1 - 20 / 20
[ Back to top ]