
Fターム[2F129AA15]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 水上/水中航行体 (265) | 潜水艦 (8)
Fターム[2F129AA15]に分類される特許
1 - 8 / 8
水中航走体の位置較正方法
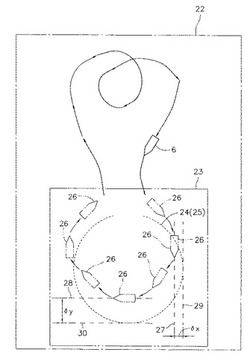
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法

【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
慣性航法システム
【課題】 簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速時計のドリフト・バイアス誤差を低減する慣性航法システムを提供する。
【解決手段】 慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープ1と、慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計2とを有する慣性測定部Sを備えた慣性航法システムIにおいて、慣性測定部Sを上面に配置し、上面と直交する慣性航法システム座標系の一軸周りに回転をする回転台3と、回転台3の回転角を検出する回転角検出手段4とを有する回転台部Rと、慣性測定部Sと回転台部Rからの出力により姿勢情報及び位置情報を計算する演算部Cとを備えたことを特徴とする。
(もっと読む)
水中航走体の検出位置修正方法およびシステム
【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
航行支援方法およびシステム
航行支援システムにおいて、ユーザによって企図された水上旅行に関連する情報がユーザからインターネットを介して受け取られる。システムは水路データを記憶しているデータベースを含む。データベースはユーザからの情報に応答してアクセスされる。少なくとも1つの推奨水上ルートが、ユーザ情報に応答してかつデータベース内の水路データに従って導出され、推奨ルートはコンピュータネットワークを介してユーザに伝達される。ルートの導出は好ましくは、有効に航行可能な区域を通って延びるルート区間だけを包含することからなる。 (もっと読む)
ナビゲーション装置
誤差数cmの範囲で移動体の現在位置を示すことができるナビゲーションシステムを提供する。 ナビゲーション装置100は、車両等の移動体に備えられたカメラにより得られる現実の映像に基づき、当該移動体から観察される範囲における映像的な特徴点の三次元座標を含む所定の三次元情報を予め生成する特徴点三次元地図生成装置110と、その所定の三次元情報を記録した記録媒体120と、移動体に備えられたカメラにより得られる現実の映像を、記録媒体120に記録された所定の三次元情報と比較し、現実の映像と一致する三次元座標上の地点と方向を求め、移動体に備えられたカメラの三次元座標上の位置,速度,加速度,視点方向,3軸回転姿勢,3軸回転速度,3軸回転加速度等の所定項目を出力,表示する地点検索ナビゲーション装置130とを備えている。 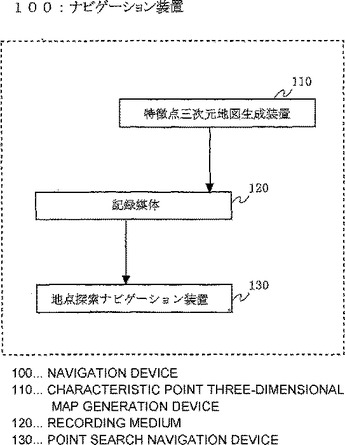 (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
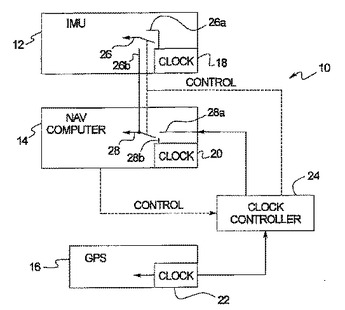
ディープインテグレーション用GPS/IMUクロック同期
航法システムは慣性計測ユニット、航法コンピュータ、GPS受信機、クロックコントローラを備える。慣性計測ユニットは第1のクロックと第1のスイッチを備え、航法コンピュータは第2のクロックと第2のスイッチを備え、GPS受信機は第3のクロックを備える。第1と第2のスイッチはクロックコントローラで制御される。このため、慣性計測ユニット、航法コンピュータ、GPS受信機においてそれぞれ自身のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータにおいて第2のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータとGPS受信機において第3のクロックを使用することができる。
 (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]