
Fターム[2F129BB02]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 人工衛星 (10,969)
Fターム[2F129BB02]の下位に属するFターム
Fターム[2F129BB02]に分類される特許
21 - 40 / 73
局所的な環境と連動した位置に基づくサービスのための地図の処理
本明細書で開示される主題は、局所的な環境と連動した位置に基づくサービスのための地図の処理のための、システム、方法、装置、デバイス、物品、および手段に関する。特定の例示的な実装形態では、方法は、特定の位置コンテキスト識別子と関連付けられた特定の局所的な環境に対応する地図情報を記憶するステップであって、特定の局所的な環境が、建物構造の少なくとも一部に対応する屋内環境を含む、ステップと、特定の局所的な環境に対応する地図情報に適用可能な更新情報を受信するステップであって、更新情報が、特定の位置コンテキスト識別子と関連付けられる、ステップと、更新された地図情報を生成するために、特定の局所的な環境に対応する地図情報を、更新情報に少なくとも一部基づいて更新するステップと、特定の局所的な環境に位置する1つまたは複数のモバイルデバイスに、更新された地図情報を提供するステップとを、含み得る。他の例示的な実装形態が、本明細書で説明される。  (もっと読む)
(もっと読む)
状態駆動型モバイル検索
モバイルコンピューティングデバイスの進行速度、進行方向、および地理的ロケーションのうちの1つまたは複数によって示されるモバイルコンピューティングデバイスの状態に少なくとも部分的に基づいてモバイルコンピューティングデバイスにおいて開始された検索クエリを処理するための方法、装置、およびシステムを提供する。 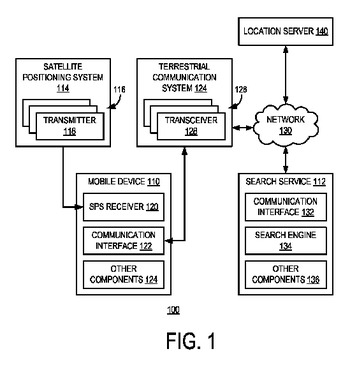 (もっと読む)
(もっと読む)
着目地点の属性を評価する方法および装置
着目地点(150)の属性を評価する方法であって、領域(152)と前記着目地点(150)とを関連付ける工程と、複数のユーザの位置データ(154,156,158)の、前記関連付けられた領域(152)を規定する位置データとの比較に従って前記属性を評価する工程(148)と、を備える。 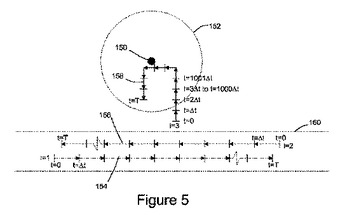 (もっと読む)
(もっと読む)
自動車の走行可能距離を推定する方法

【課題】 自動車の走行可能距離を推定する方法を提供する。
【解決手段】 本発明は、自動車に収容され、検出することができるエネルギの量から自動車の走行可能距離を推定する方法に関し、運転者が、最大許容速度および/または最大許容加速度および/または快適システムの最大性能レベルを制限し、前記自動車の周辺のルート特性、特に標高特性および/または道路の種類が検出され、コンピュータ装置が、少なくとも、実施された制限、検出したルート特性、および引き続き利用可能なエネルギ量に基づいて、引き続き見込まれる走行可能距離を計算し、これを表示する。
(もっと読む)
建物用の経路案内グラフ
本明細書で開示される主題は、建物情報に少なくとも一部基づいて、経路案内グラフを作成するための、システム、方法などに関する。いくつかの例示的な実装形態では、方法は、建物構造の少なくとも一部を表す建物情報を得るステップを含む。点のグリッドが、建物情報に重畳されうる。少なくとも1つの経路案内グラフが、重畳された点のグリッドおよび建物情報に少なくとも一部基づいて、作成されうる。他の例示的な実装形態も、説明される。 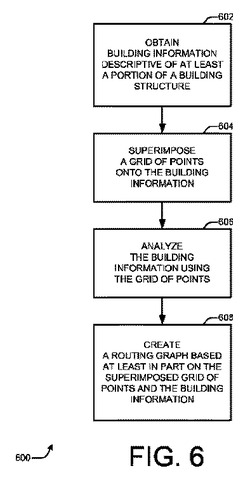 (もっと読む)
(もっと読む)
搬送波位相を使用したフィルタモデルの適用に作用する方法および装置
ナビゲーションソリューションを取得するために使用されるフィルタモデルの適用に影響を及ぼすために、様々な電子デバイスで実施され得る方法および装置が提供される。特に、複数のフィルタモデルから特定のフィルタモデルの適用を選択するために、1つまたは複数の受信信号の信号特性が使用される。 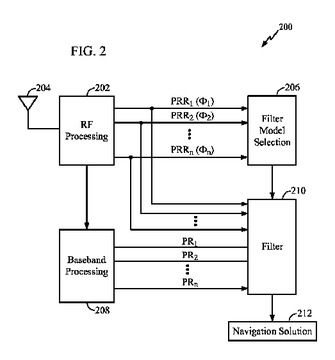 (もっと読む)
(もっと読む)
シグナリングを低減するための向上した測位支援データ

支援データの拡張セットに基づいてモバイルデバイスのロケーション推定値を判断するための装置および方法を提示する。拡張支援データは、(現在の)第1の地理的エリア中ではモバイルデバイスによって閲覧可能であることが予想されないが、(将来の)第2の地理的エリア中ではモバイルデバイスによって閲覧可能であることが予想される、セルラー基地局およびアクセスポイントなどの基地局のための支援データを含む。将来有用になることが予想される支援データをモバイルデバイスにシードすることによって、ネットワークは、ネットワークとモバイルデバイスとの間のメッセージング、およびモバイルデバイスによるバッテリー消費を低減する。 (もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
マルチパス信号信頼度判定方法、コード位相誤差算出方法、コード位相算出方法、位置算出方法及びマルチパス信号信頼度判定装置
【課題】マルチパス信号の善し悪しを判定する新たな仕組みを提案すること。
【解決手段】携帯電話機1は、GPS衛星から発信されたGPS衛星信号を受信した受信信号と、レプリカコード生成部により生成されたレプリカコードとを乗算する相関演算処理を行って相関値を算出する。そして、相関演算処理により求められたピーク相関値と、当該ピーク相関値を示したピーク位相からM(1≦M<2)チップ遅れた位相の相関値とを用いてPL値を算出し、算出したPL値に基づいて、受信信号がマルチパス信号である場合の当該マルチパス信号の信頼度を判定する。
(もっと読む)
情報提供装置
【課題】複数の候補物件からの絞込み処理を改善する。
【解決手段】候補選択ステップ110において、複数の候補物件から少数の候補物件への絞込み処理が実行される。候補選択ステップ110には、到達時間別選択ステップ140が含まれている。この処理においては、複数の候補物件との間の道路を経由した移動に要する到達時間が、指標として提供される。到達時間の提供にあたっては、所定の到達時間範囲ごとに設けられた複数の区分が利用される。複数の候補物件は、その到達時間に応じて、いずれかの区分にグルーピングされる。使用者に対して、複数の区分が選択の対象として提示される。使用者による選択操作は、ナビゲーション装置に入力される。到達時間の区分毎の選択処理は、任意の到達時間をもつ候補物件を使用者が容易に選択することを可能とする。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、当該GNSS受信装置が同一のGNSS衛星からの測位信号を捕捉した状態において、直接波と反射波との間で位相差が生じるように配置される複数のアンテナと、同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、各擬似距離の差分を求める擬似距離差分計算部と、該差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、マルチパスの影響を受けていると判定された場合に、前記位置推定部により推定された位置情報を出力する位置情報出力部とを有する。
(もっと読む)
バナー広告付車両搭載ナビゲーション機器
【目的】 従来から使用されている車両搭載のナビゲーション本体のモニター部分は、ナビゲーションシステムを利用した地図のみの映像表示がなされており、高額商品の割には多機能化が生かされてなく、該機器の多機能化を図ることによって該機器を安く販売できるようにしたものである。
【構成】 従来の車両搭載のナビゲーションの地図のみを映像表示する映像表示モニターとは別に、地図を表示するのと同時に広告を表示するもので、インターネット広告管理センターより広告情報を配信させ該モニターに広告を表示させ宣伝をし、その広告料の一部を車両所有者に還元して、商品を低額にして容易に該高額機器が購入できるようにしたものである。
(もっと読む)
GNSS受信装置及び測位方法
【課題】測定精度を向上させること。
【解決手段】GNSS受信装置は、GNSS衛星からの測位信号に含まれるコードを用いて、当該GNSS受信装置により観測すべきデータを求める手段と、GNSS衛星からの測位信号に含まれる軌道情報に基づいて、GNSS衛星の位置を算出する手段と、測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する手段と、算出されたGNSS衛星の位置と、推定された当該GNSS受信装置の位置とに基づいて、GNSS衛星と当該GNSS受信装置との間で観測すべきデータを推定する手段と、当該GNSS受信装置の有する誤差に起因する観測データの誤差を推定する手段と、観測データと、観測データ推定値と、受信装置誤差推定値に基づいて、観測データに含まれる誤差を推定する観測データ誤差推定部と、推定された観測データ誤差が所定の閾値以下である観測データを用いて測位演算を行う手段とを有する。
(もっと読む)
ナビゲーション装置及び方法
ナビゲーション装置は全地球航法衛星システム(GNSS)の衛星からGNSS信号ブロードキャストを受信するためのGNSS受信器と、ユーザ入力の位置情報、時間情報、又はワイヤレスネットワークのサービスエリア情報を受信するための受信器と、処理装置とを備える。処理装置は、ユーザ入力の位置情報、時間情報、又はワイヤレスネットワークのサービスエリア情報からシード位置を判定し、該判定したシード位置に基づいてGNSS衛星を取得するためにGNSS受信器を制御する。 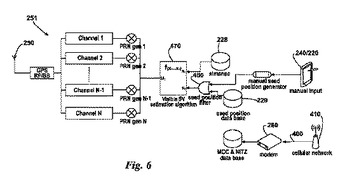 (もっと読む)
(もっと読む)
移動体位置特定装置
【課題】より精度良く移動体の位置を特定することが可能な移動体位置特定装置を提供すること。
【解決手段】衛星からの電波に基づき移動体の位置を演算する第1の演算手段と、移動体の挙動に基づき前記移動体の位置を演算する第2の演算手段と、第1の演算手段による演算結果と第2の演算手段による演算結果のいずれか一方、又は双方に基づいて移動体の位置を特定する位置特定手段と、を備える移動体位置特定装置であって、位置特定手段は、移動体が強電磁界領域内に在るか否かを判定し、移動体が強電磁界領域内に在ると判定した場合には、判定手段により前記移動体が強電磁界領域に在ると判定されなかった場合に比して、第2の演算手段による演算結果を重く用いて前記移動体の位置を特定することを特徴とする。
(もっと読む)
目的地を判定するためのベクトルを有する地図データベース、及びベクトル判定方法
方法、データベース、メモリ、コンピュータが読取可能な媒体、及びナビゲーション装置が開示される。少なくとも1つの実施形態において、本方法は、複数の投影点を作成するために、複数の既知の住所地点を、地図データベースの住所セグメント・ベクトルに投影するステップ(S1)と、対応する複数の補間点を作成するために、当該複数の住所地点の住所について位置を補間するステップ(S2)と、投影点と対応する補間点との距離が閾値距離を上回る場合に、当該住所セグメント・ベクトルを、複数の住所サブセグメント・ベクトルに分割するステップ(S3)とを含む。実施形態は、住所セグメント・ベクトルが分割された場合に、本方法における複数の住所サブセグメント・ベクトルを、対応する住所セグメント・ベクトルの代わりに、及び対応する住所セグメント・ベクトルとともに、のうちの少なくとも1つにより格納したデジタル地図アプリケーション・データベースを含むメモリ(230)と、当該メモリ(230)を含むナビゲーション装置(200)と、複数の住所セグメント・ベクトル及び複数の住所サブセグメント・ベクトルを含むデジタル地図アプリケーション・データベースと、当該デジタル地図アプリケーション・データベースを含むコンピュータ可読媒体と、を含む。 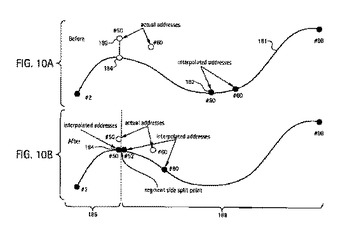 (もっと読む)
(もっと読む)
GNSS衛星による位置測定方法と装置
【課題】位置計算を航行メッセージの読み取りなしで、そして、ネットワークからのアシスト情報もなしで計算可能とする。
【解決手段】位置計算はコードと周波数の観測値とメモリーに保存される予測エフェメリスデータを利用して行われる。コードと周波数の観測値と予測値の差にもとづいて計算された損失関数が位置計算に使われる。位置計算は全地球衛星航法システム信号の1コード周期の利用で可能である。位置計算装置はフロントエンドと航行ユニットから構成される。フロントエンドユニットと航行ユニットは分離されている。デジタル化された中間周波数データはフロントエンド・ユニットから航行ユニットへ直接かデータ・リンク経由で通信可能であり、後の利用のためにメモリーに保存することも可能である。
(もっと読む)
軌道表示のための方法及び装置
本発明の実施形態は、グラフィック情報を表示するための表示装置(14、240)と、前記グラフィック情報を表示するために、前記表示装置(14、240)を制御するためのプロセッサ(11、210)と、軌道の方向に関する情報と色との関係を表すカラーマッピング情報(20)のためのストア(12、230)と、前記判断された情報と前記カラーマッピング情報(20)に基づいて、軌道の方向に関する情報と色とを判断するための軌道-色モジュール(490)とを有し、前記プロセッサ(11、210)は前記軌道-色モジュール(490)に応答して、グラフィック構成要素の少なくとも一部を前記判断された色で表示するように、表示部(14、240)を制御することを特徴とする装置を提供する。  (もっと読む)
(もっと読む)
衛星ナビゲーション・システムにおけるステータス・レポートの最適化方法
【課題】衛星ナビゲーション・システムにおけるステータス・レポートを最適化する方法を提供する。
【解決手段】衛星ナビゲーション・システムの通信網に関する情報を求める情報取得ステップ(S10)と、求めた前記情報を、ステータス・レポートとして、1つまたは複数のナビゲーション・メッセージを介して伝送する情報伝送ステップ(S12)とを含む。
(もっと読む)
低電力センサを使用するGPS省電力
位置ロケーションシステム、装置及び方法が開示される。無線装置は、衛星測位システム(SPS)受信機及び位置ロケーションプロセッサを含む。SPS受信機は、測位信号の有効性を検出し、位置ロケーションプロセッサは、測位信号に基づいて無線装置の初期位置を決定する。測位信号が利用可能なものとして検出される場合、コントローラは省電力イベントを生成する。コントローラは、省電力イベントのタイミングおよび期間を決定する。省電力イベント中、無線装置の消費電力を低減するために、SPS受信機は非アクティブにされ、及び/または測位信号の処理はサスペンドされる。初期位置は、省電力イベント中に1以上のセンサからの相対的な測位情報に基づいて更新される。コントローラは、SPS受信機をアクティブにし、省電力イベントに続く測位信号の処理を再開する。  (もっと読む)
(もっと読む)
21 - 40 / 73
[ Back to top ]