
Fターム[2F129BB02]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 人工衛星 (10,969)
Fターム[2F129BB02]の下位に属するFターム
Fターム[2F129BB02]に分類される特許
41 - 60 / 73
測位システム、位置情報送信機、通信端末、及び測位システムの制御方法
【課題】安定して確実に通信端末の現在位置を取得可能な測位システムを提供する。
【解決手段】位置を示す位置情報を含んだ位置情報信号を人工衛星2から送信される衛星測位信号と互換性を有する信号として送信する位置情報送信機100と、衛星測位信号を受信すると人工衛星2の位置を求めることにより自身の現在位置を求め、位置情報信号を受信すると位置情報に基づき自身の現在位置を求める通信端末200とを含む測位システム1において、位置情報送信機100から、通信端末200の各相関器を衛星測位信号又は位置情報信号のいずれを受信するように設定するかを決定する境界フラグ311を含む位置情報信号を送信し、通信端末200が、境界フラグ311に基づき相関器が衛星測位信号又は位置情報信号のいずれを受信するのかを設定するようにする。
(もっと読む)
GNSS受信装置及び測位方法

【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行うGNSS受信装置は、山により影響を受ける測位信号を送信するGNSS衛星を選択するGNSS衛星選択手段と、GNSS衛星選択手段により選択されたGNSS衛星をマスクして測位演算を行う第1の測位演算手段とを有する。
(もっと読む)
SPSオペレーション中の初期位置不確定性を縮小するためのシステムおよび/または方法
ここに示された主題は、システム、および移動局の初期位置不確定性を縮小するための方法に関する。一例において、クレームされた主題はそのように制限されていないが、初期位置推定を改善するプロセスは、サービスセルおよび受信機に最も近い少なくとも1つの他の目標の場所を特定することと、サービスセルおよび少なくとも1つの他の目標の特定された場所に少なくとも部分的に基づいて受信機の場所の最初の推定値を判定することと含む。  (もっと読む)
(もっと読む)
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
衛星信号受信装置および衛星信号受信装置の制御方法
【課題】利用者が手動操作で受信を行う際に、測位処理の終了までやタイムアウトまでの時間を把握でき、利便性を向上できて使い勝手の良い衛星信号受信装置を提供すること。
【解決手段】GPS付き腕時計は、GPS衛星から送信される衛星信号を受信する受信回路と、ディスプレイと、制御部20とを備える。衛星信号は、複数のサブフレームを備える。制御部20は、受信部の動作を制御する受信制御手段51と、複数のGPS衛星から受信した衛星信号によって測位処理を行う測位処理手段53と、受信した衛星信号に含まれるサブフレームの種類を判定し、最初に受信したサブフレームの種類の判定結果によって測位処理が終了するまでの測位残時間を算出する測位残時間算出手段54と、前記測位残時間を前記ディスプレイに表示する表示制御手段55とを備える。
(もっと読む)
車両運転の過程を監視するための装置
車両運転の過程を監視するための装置であって、信号を処理する第1の手段と、車両の動きを検出する第2の手段と、ユーザに情報を表示する対話型の表示部を提供する手段と、車両の理論上の最適な挙動に関する燃料消費特性および技術的特徴を知るように構成された手段を備えた装置において、上記信号を処理する手段は、車両の上記燃料消費特性と技術的特徴に基づいて理論上の最適な消費を計算し、実際の消費を理論上の最適な消費に等しくするために要求される運転パラメータを確立し、この運転パラメータに関する情報をユーザに知らせるべく表示に利用できる手段に表示するようになっている。 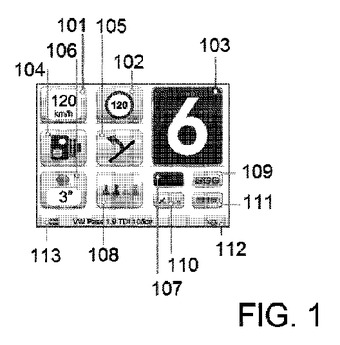 (もっと読む)
(もっと読む)
測位方法、プログラム及び測位装置
【課題】計測タイミングと出力タイミングとの時刻差に起因する測位精度の劣化を防止して、より真位置に近い位置が出力されるようにすること。
【解決手段】GPS衛星信号に基づいて携帯型電話機1の現在位置及び速度ベクトルが間欠的に計測される。そして、計測時刻と測位結果の出力時刻との時刻差が算出され、計測された位置と計測された速度ベクトルと算出された時刻差とを用いて、出力時刻における位置が推定される。そして、推定された位置を用いて出力位置が決定されて出力される。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】現実的な移動体の移動を想定した適切な誤差推定を実現する測位方法等を提供す
ること。
【解決手段】慣性航法演算処理により随時求められる相対高度である第1高度変化「Δh
i」と、移動体である自動車の外気圧を検出する気圧センサの検出結果に基づいて算出さ
れる相対高度である第2高度変化「Δhb」との差「δh=Δhi−Δhb」が算出される
。そして、算出された高度変化の差「δh」、慣性航法演算処理により求められる自動車
の直進方向に対する左右方向の速度「vix」、及び、慣性航法演算処理により求められる
自動車の高度方向の速度「viz」に応じた観測値を用いたカルマンフィルタ処理が行われ
て、慣性航法演算処理の演算結果「(pi,vi,Ai)」に含まれる誤差「(δp,δv
,ε)」が推定され、推定された誤差を用いて慣性航法演算処理の演算結果が補正されて
、自動車の現在位置が測位される。
(もっと読む)
GNSS受信装置及びそれを用いた運転支援装置
【課題】マルチパスのある環境でも位置測位精度の誤差の少ないGNSS測位を行うことができるGNSS受信装置及びそれを用いた運転支援装置を提供する。
【解決手段】GNSS衛星から送信される電波を右旋偏波用アンテナ10と左旋偏波用アンテナ20で受信し、受信した電波の電界強度を選択処理部30で比較し、比較した電波の電界強度のうち、GNSS衛星から送信される電波と同じ右旋偏波用アンテナ10で受信した電波の電界強度が、左旋偏波用アンテナ20で受信した電波の電界強度より大きい場合に、右旋偏波用アンテナで受信した電波を測位に用い、小さい場合には、測位に用いない。さらに、右旋偏波用アンテナで受信した電波の電界強度が所定の値以上である場合にのみ、右旋偏波用アンテナで受信した電波を測位に用い、受信した電波の電界強度が所定の値より小さい場合には、受信した電波を測位に用いない。
(もっと読む)
経路探索装置及び経路探索方法
【課題】テレビジョン放送の受信品質情報に基づいて経路の探索を行うこと。
【解決手段】地図データに基づいて、目的地までの経路の探索を行う経路探索装置に、地図データを含む受信品質レベルデータベースには、該地図データの各地点におけるテレビジョン放送の視聴が可能であるか否かを示す受信品質レベルが含まれ、目的地までの経路を、テレビジョン放送の受信品質レベルに基づいて探索する経路探索手段を有することにより達成される。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響の有無を検出し、マルチパスの影響がある場合にはその影響を低減し、測定精度を向上させること。
【解決手段】複数のGNSS衛星から送信される測位信号に基づいて位置を算出するGNSS受信装置に、測位信号に基づいて求められた擬似距離の時間特性に基づいて、該測位信号がマルチパスの影響を受けて受信されたか否かを判断するマルチパス判断手段と、測位信号がマルチパスの影響を受けて受信されたと判断された場合に、擬似距離の時間特性に基づいて、直接波の位相と反射波の位相とが等しくなるゼロ点を求める位相差ゼロ点算出手段と、測位信号に基づいて求められたドップラー周波数の積算値の時間特性と、位相ゼロ点算出手段により求められたゼロ点に基づいて、擬似距離を修正する擬似距離修正手段と、修正された擬似距離に基づいて位置を求める測位演算手段とを備えることにより達成される。
(もっと読む)
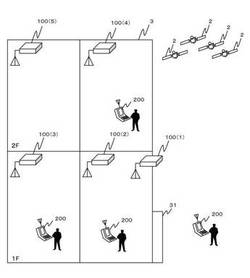
位置情報提供システムおよび屋内送信機
【課題】電波が届かない場所において位置情報を提供する。
【解決手段】屋内送信機はプログラマブルに送信信号のフォーマットを変更可能であり、位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S632)と、そのデータから座標値を取得するステップ(S634)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
低電力慣性航法処理
【課題】バッテリー電力パック等の可搬電力源で長期間作動することが意図されている航法用支援施設(例えば、パーソナル・ナビゲーション・システム)に対し、低い総電力消費で、慣性航法データを処理するための方法及びシステムを提供する。
【解決手段】本慣性航法システム100は、データバッファ108と、データバッファと通信する航法処理用ユニット106とを備える航法処理用アセンブリ102と、データバッファと通信する複数の航法用センサ104と、航法処理用ユニットと通信するシステムインターフェース110とを備えている。複数のセンサからのデータ測定値は、データバッファに累積される。航法処理用ユニットは周期的に作動化され、累積されたデータ測定値を処理する。航法処理用ユニットは、累積されたデータ測定値が処理されると非作動化して、総電力消費を削減する。
(もっと読む)
地図表示装置及び経路表示方法
【目的】経路の広い範囲を表示可能とする「地図表示装置及び経路表示方法」を提供することである。
【構成】操作部3で経路全体表示が指示されると、表示対象領域決定部12は、経路データを用いて出発地からの直線距離と目的地からの直線距離の和がほぼ最大となる中間表示地点を決定する。次に、表示対象領域決定部12は、出発地、目的地、中間表示地点を結ぶ三角形の外接円に外接し、上が北向きの方形領域を主要表示対象領域Jとして決定し、外接円の中心座標を表示中心地点Cとして決定する。地図表示制御部7は、地図データと経路データを用いて、主要表示対象領域Jを含み、上が北向きの地図に経路を重ねた画像を描画し、表示部5に表示させる。この際、地図表示制御部7は表示地図の中心を表示中心地点に一致させる。
(もっと読む)
地物情報収集装置及び地物情報収集方法
【課題】低コストで高精度な地物情報を収集することが可能な地物情報収集装置及び地物情報収集方法を提供する。
【解決手段】自車両の現在位置を表す自車位置情報Pを取得する自車位置情報取得手段16と、自車両の周辺の画像情報Gを取得する画像情報取得手段12と、画像情報Gに含まれる認識対象の画像認識処理を行う画像認識手段18と、自車位置情報Pに基づいて、画像認識手段18による認識対象の認識結果を表す認識情報を、当該認識対象の認識位置の情報Aaと関連付けて記憶する認識結果記憶手段DB3と、同じ場所の画像情報が複数回画像認識されることにより認識結果記憶手段DB3に記憶された、同じ場所に関する複数の認識情報に基づいて、繰り返し画像認識することが可能な認識対象を学習地物として抽出し、学習地物の位置情報Aaと共に出力する学習地物抽出手段31と、を備える。
(もっと読む)
汎用高性能ナビゲーションシステム
低地球軌道(LEO)衛星を使用し汎用高性能ナビゲーションシステムを提供する。ナビゲーションを遂行する方法は一実施形態において、LEO衛星からLEO信号を受信するステップと、LEO信号からナビゲーション信号を復号化するステップと、第1及び第2の測距発信源から第1及び第2の測距信号をそれぞれ受信するステップと、第1及び第2の測距発信源に関連する較正情報を割り出すステップと、ナビゲーション信号と、第1及び第2の測距信号と、較正情報とを用いて位置を計算するステップとを含む。別の実施形態において、LEO衛星からLEO信号を提供する方法は、複数の送信スロットにわたって複数の送信チャネルを提供するステップを含み、ここで送信チャネルは1セットの通信チャネルと1セットのナビゲーションチャネルとを備え、同方法はさらに、ナビゲーション信号に対応する第1の擬似ランダムノイズ(PRN)測距オーバーレイを生成するステップと、ナビゲーションチャネルの第1のセットへ第1のPRN測距オーバーレイを適用するステップと、通信チャネルとナビゲーションチャネルとをLEO信号にまとめるステップとを含む。方法はまた、LEO衛星からLEO信号をブロードキャストするステップを含む。低地球軌道(LEO)衛星データアップリンクも提供する。方法は、LEO衛星へデータアップリンク信号をブロードキャストするステップを含む。様々な局地的ナビゲーション信号妨害アプローチも提供する。或る操業エリアにわたって変調済みノイズ信号をブロードキャストすることにより、ナビゲーション信号に対応する複数の妨害バーストを提供する。妨害バーストは、当該操業エリアの中でナビゲーション信号を概ね遮るように構成する。 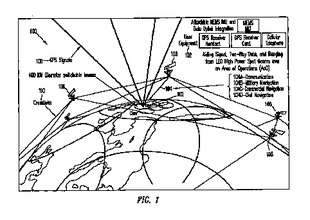 (もっと読む)
(もっと読む)
GPSの精度を自動的に向上するナビゲーション装置
本発明は、位置測定装置から位置情報を受信するように構成されるプロセッサを具備するナビゲーション装置に関する。プロセッサは、運動検出器から運動情報を受信し、前記運動情報を使用して前記装置が静止中であるかを判定するように更に構成される。装置が静止中であると判定された場合、プロセッサは、装置が静止中である期間に位置測定システムから受信される連続した位置に関する情報を使用してある期間にわたる平均位置を計算する。平均位置は、ユーザに命令を与える等のナビゲーションの目的で使用される。静止中に平均することにより、更に適切な命令を与えるために使用される更に正確な位置が判定される。 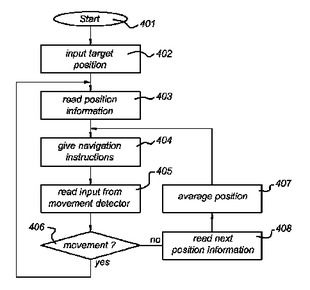 (もっと読む)
(もっと読む)
干渉および電波妨害に対する感受性を低減したナビゲーションシステムのための方法および装置
ナビゲーションシステムは、GPSへのあらゆる形の干渉または電波妨害に対する著しいレベルの保護を、コスト効率のよい方法で提供する。このシステムは、GPSと組合せた地上基準局および地球低軌道(LEO)衛星のネットワークを採用する。基準局とユーザとをリンクする、GPS衛星への共通視野測距ジオメトリが、設定される。同じ対の基準局とユーザとの間のLEO衛星への第2の共通視野ジオメトリも設定される。地上局は、GPS、LEO衛星の信号の搬送波位相測定を行なうことにより、リアルタイムの支援信号を合成する。この支援情報はLEO衛星を介して、周囲の電波妨害を貫通するように高出力でユーザ受信機に送信される。ユーザ受信機は、LEO衛星の搬送波位相を追尾し、支援情報を復調して、次に、GPS信号の拡張された一貫した測定を可能にするように搬送波位相測定値および支援情報を適用する。このシステムはそれにより、電波妨害で失われたであろうGPS信号を復元させる。 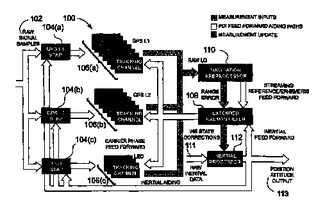 (もっと読む)
(もっと読む)
完全性監視付きハイブリッドINS/GNSSシステムおよび完全性監視方法
本発明は、慣性装置と衛星測位受信機とのハイブリッド化システムから得られる位置および速度情報の完全性の監視に関する。本発明は、より詳細には、閉ループにおいてハイブリッド化したINS/GNSSシステム(「慣性航法システム」および「全地球的航法衛星システム」を表す)として当業者に知られる航法装置に関する。 (もっと読む)
ハイブリッド位置判断システムにおける誤差推定値を判断するための方法および装置
【課題】マルチパシングによって生じる誤差を判断し、誤差推定を向上する。
【解決手段】データベースを設定し、その中に、ビーコンに対する特定の疑似範囲の測定値に対して推定された誤差量を維持する。クラスタを定める。各クラスタは、選択したパラメータに対する値の範囲と関係付けられている。次に、疑似範囲の測定値は、疑似範囲の測定値をとった時間に(または、その時間の前後を含む時間)おける選択したパラメータ値に基づいて、特定のクラスタと関係付ける。求めた疑似範囲の測定値の推定値の数がより多くなると、クラスタのサイズ(すなわち、選択したパラメータ値の範囲)を小さくすることができる。選択したパラメータと疑似範囲の測定値における誤差との相関によって、クラスタのサイズが小さくなると、誤差推定値の分散が小さくなる。誤差推定値の平均値を使用して、将来の疑似範囲の測定値の誤差を補正する。
(もっと読む)
41 - 60 / 73
[ Back to top ]