
Fターム[2F129BB13]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 自然にあるもの (84) | 星 (8)
Fターム[2F129BB13]に分類される特許
1 - 8 / 8
デジタルカメラ
方位推定装置およびプログラム
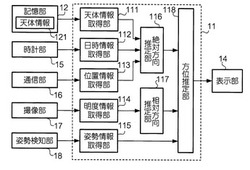
【課題】地表において太陽光を用いて方位を推定する。
【解決手段】方位推定装置は、地球に対する太陽の運動を示す天体情報を記憶手段から取得し、時計から日時情報を取得し、測位手段により計測された自装置の位置を示す位置情報を取得し、自装置に照射される太陽光を複数の偏光成分に分離し、分離した各偏光成分の強度を検出する検出手段から、当該各光強度を示す光強度情報を取得し、或る方向を基準とした前記自装置の姿勢を検知する姿勢検知手段から当該自装置の姿勢を示す姿勢情報を取得する。そして、方位推定装置は、天体情報を参照し、日時情報が示す日時に、位置情報が示す位置を原点とする地平座標における太陽の方向を推定し、光強度情報、および取得された姿勢情報に応じて、前記自装置を基準とした太陽の方向を推定する。そして、方位推定装置は、これら推定した各方向に応じて、自装置の位置を原点とする地平座標における方位を推定する。
(もっと読む)
オブジェクトを使用した慣性航法システムの整合および較正
慣性航法システムの初期化が、オブジェクトの画像から取得される情報を使用して、実行される。グローバル基準フレーム内のオブジェクトに対する位置および向き情報と、前記オブジェクトに対するカメラに関する位置および向き情報が、前記画像から取得される。前記グローバル基準フレーム内の前記カメラの位置および向き情報が、慣性センサ基準フレームおよび航行座標フレームの間の変換マトリックスとともに、判断される。慣性航法システムが、前記カメラの位置および向き情報と、前記変換マトリックスと、前記オブジェクトが画像化されたときの前記カメラの速度、すなわちゼロ、とを使用して、初期化される。慣性センサからの測定値と初期化データを使用して、モバイルプラットフォームの位置が、航行中に更新され、デジタルマップ上などに、提供され得る。慣性航行エラーは、異なるオブジェクトの画像から取得される情報を使用し、修正され得る。  (もっと読む)
(もっと読む)
自車影認識装置

【課題】 自車影領域を高精度に特定できる自車影認識装置を提供する。
【解決手段】 自車影認識装置11は、自車が走行している路面を含む範囲を撮像する自車周辺撮像装置300と、自車の現在位置の情報と、現在の日時の情報とから太陽の位置を算出する太陽位置算出手段110と、太陽位置算出手段110で得られた太陽の位置情報と、自車の進行方位情報と、自車の立体形状情報とから自車影が発生する領域を推定する自車影領域推定手段120と、自車影領域推定手段120から得られる座標情報に基づき、車両周辺撮像装置300で得られた画像の中から自車影領域を特定する自車影領域検出手段130と、を備えた。
(もっと読む)
スタートラッカ用ノイズ除去/グルーピング回路
【課題】画像データの連続性が著しく低下する宇宙空間に点在する星のグルーピングを的確に行う。
【解決手段】画像データの二値化データの各画素が縦/横2連結以下なら無効データ、縦/横3連結以上なら有効データと判断するノイズ除去ロジック4と、有効データの画素毎に、周囲の画素との連結状態により、各星に割り当てたグルーピングラベル番号を振り付けるグルーピングロジック5とを含む。グルーピングラベル番号振付けに際し、注目画素と隣接する複数の画素が、異なるグルーピングラベル番号を有する場合があり得るときは、隣接する画素のグルーピングラベル番号の内の最小のグルーピングラベル番号を注目画素のグルーピングラベル番号とする。
(もっと読む)
編隊飛行におけるスター・センサと光学式計測センサとの組合せにより改良された絶対ターゲット・システム
【課題】編隊飛行におけるスター・センサと光学式計測センサとの組合せにより改良された絶対ターゲット・システムを提供する。
【解決手段】本発明は天体観測衛星に組み込まれることを意図している絶対ターゲット・システムに関する。
最高の精度を備える絶対ターゲット・システムを確立するため、本発明はスター・センサ(4)を光学式計測センサ(5N、5R)と連結することを提案する。これら2つのアイテムの装置は特に編成飛行ミッションに対して、通常は衛星に既に搭載されているため、この解決策は追加の重量および費用を加えない。
(もっと読む)
ナビゲーション装置
【課題】目印となるコンビニ等の施設がなくても、またこれら施設が案内されなくても、自車が正しい方向に進んでいることを使用者が確認することのできるナビゲーション装置を提供すること。
【解決手段】自車の走行道路及びその走行道路沿いの建築物が描かれた立体的な地図画像を表示部に表示すると共に、その地図画像の表示方位と自車位置から自車の進行方向に見えるであろう星空画像の表示方位とが一致するように、地図画像の背景として星空画像を表示部に表示し、自車の移動に合わせてこれら地図画像及び星空画像を順次更新していく手段を装備する。
(もっと読む)
動的なCMGアレイおよび方法
コントロール・モーメント・ジャイロ(CMG)(10)の故障、あるいはスペースクラフト(S/C)質量特性またはミッションの変更を補償するようにCMG(10)を姿勢変更するための方法および装置が提供される。改良型のCMG(10)は、CMG(10)をCMGジンバル軸と平行でない軸(18)のまわりで回転させるための駆動手段を備える。CMGアレイ姿勢変更中を除いて、解除可能なクランプが、CMG(10)をスペースクラフトに固定する。CMGアレイ(50)は、姿勢センサ(102)、コマンドモジュール(104)、データおよびプログラムを格納するためのメモリ(108)、(好ましくは各CMG軸(18、22、30)ごとの)CMG駆動装置(112)およびセンサ(114)、ならびにこれらの要素を結合する制御装置(116)と組み合わされる。この方法は、CMG(10)が故障し、あるいはS/C特性またはミッションが変化したかどうか決定するステップ、アレイの作動中のCMG(10)を識別するステップ、スペースクラフト制御の向上のために新しいアレイ姿勢変更を決定するステップ、アレイのCMG(10)を解除し、姿勢変更し、再び固定するステップ、および新しいアレイ姿勢のためにS/C制御パラメータを更新するステップを備える。 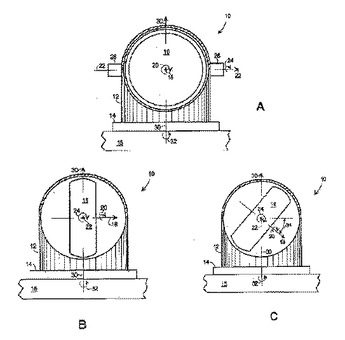 (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]