
Fターム[2F129BB20]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 速度センサ (4,676)
Fターム[2F129BB20]に分類される特許
221 - 240 / 4,676
車両支援装置
【課題】進行方向前方の交通情報に基づいた支援車両の減速支援処理により交通流が悪化するのを抑制する。
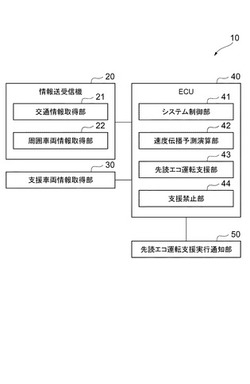
【解決手段】進行方向前方の交通情報に基づいて運転者に早めのアクセルオフを誘導する先読エコ運転支援処理を実行する先読エコ運転支援部43と、交通情報取得部21が取得した交通情報、周囲車両情報取得部22が取得した周囲車両の走行情報、及び支援車両情報取得部30が取得した支援車両の走行情報に基づいて先読エコ運転支援処理を実行すると交通流を悪化させる可能性があるか否かを判断し、先読エコ運転支援処理の実行により交通流を悪化させる可能性があると判断すると先読エコ運転支援部43による先読エコ運転支援処理を禁止する支援禁止部44と、を備える。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム

【課題】電気自動車のバッテリ残量を考慮して、電気自動車を利用したユーザが希望時刻に指定場所に到着できるかを判断し、到着できない場合、公共交通機関による経路を含む代替経路を案内することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、電気自動車を利用する案内経路である電気自動車経路を探索し、電気自動車のバッテリの残存容量および電気自動車経路情報に基づき、電気自動車が到着希望時刻までに目的地に到着できるか否か判定し、電気自動車が到着希望時刻までに目的地に到着できないと判定された場合、電気自動車経路以外の案内経路である代替経路を探索し、電気自動車経路情報または代替経路情報を含む経路案内情報を出力部を介して出力させる。
(もっと読む)
ナビゲーション装置とそのナビゲーション方法
【課題】 従来、ナビゲーション装置では、道路の所定の区間についての渋滞情報を取得して、渋滞の度合いを提示する技術が用いられている。しかし、渋滞の度合いを事前に運転者に示すことはできても、渋滞箇所の渋滞を軽減することはできない。
本発明の目的は、渋滞の発生し易い道路の渋滞度合いを軽減しうる具体的な対策を運転者が簡便に実施することのできる技術を提供することにある。
【解決手段】
本発明のナビゲーション装置は、推奨経路に含まれるリンクから、渋滞の原因となる所定の特徴を備えるリンク列を特定し、特定したリンク列の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定し、所定の渋滞の度合いを超える場合に、リンク列の特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手段と、を有する。
(もっと読む)
ナビゲーション装置および経路探索方法
【課題】退出予定の出口インターチェンジが通過できない場合に、自動的に他の出口インターチェンジを選択して推奨経路を探索するナビゲーション装置を提供する。
【解決手段】車両が推奨経路上の高速道路を走行すると、出口迂回ボタン24を表示モニタ16に表示する。出口迂回ボタン24が押圧されると退出予定の出口インターチェンジに相当するノードに接続している一般道路のリンクのリンクコストを大きくする。そして、車両の現在地を経由地または出発地とした推奨経路を再探索する。再探索された推奨経路を表示モニタ16に表示する。そして、再探索された推奨経路にしたがって経路誘導を行う。
(もっと読む)
エネルギー消費量計算装置とそのエネルギー消費量計算方法
【課題】 本発明の目的は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現することにある。
【解決手段】
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、エネルギーを供給するエネルギー供給手段が所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、エネルギー消費量推定手段が推定した所定の区間におけるエネルギー消費量と所定の区間におけるエネルギー消費実績量との差に応じて、エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、エネルギー消費量補正手段により補正した所定の区間のエネルギー消費量を用いてエネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示手段と、を備えることを特徴とする。
(もっと読む)
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
(もっと読む)
旅行時間情報処理装置及び走行経路探索システム
【課題】交通状況の変化後の状態が定常的な状態となる場合であっても統計旅行時間の質を向上させることが可能となる旅行時間情報処理装置及び走行経路探索システムを提供する。
【解決手段】非定常データ記憶部306に記憶した非定常データの交通情報が定常性を有すると判定した場合は、その交通情報を定常データ記憶部305に記憶し、以後においては定常データとして扱うようにしたので、交通状況が変化した場合であっても統計旅行時間の質を向上させることができると共に、質の高い統計旅行時間に基づいて最適な経路情報を推測してナビゲーション装置に対して送信することができる。
(もっと読む)
ナビゲーション機能を有する情報端末
【課題】ナビゲーション機能を有する情報端末を提供する。
【解決手段】ナビゲーション装置100には追加アプリを実装することができる。追加アプリはポータルサイト500から購入する。ナビゲーション装置100は、追加アプリとナビゲーション用プログラムとを連携処理するAPIを備える。APIは、ナビゲーション機能に固有のサブルーチンを有し、追加アプリとナビゲーション用プログラムとの連携が円滑にできる。APIを公開することにより、ナビゲーション装置メーカ以外のソフトハウスが簡単に追加アプリを作成することができ、ナビゲーション装置に追加する機能を従来よりも大幅に増やすことができる。
(もっと読む)
ナビゲーション機能を有する情報端末
【課題】ナビゲーション機能を有する情報端末を提供する。
【解決手段】ナビゲーション装置100には追加アプリを実装することができる。追加アプリはポータルサイト500から購入する。ナビゲーション装置100は、追加アプリとナビゲーション用プログラムとを連携処理するAPIを備える。APIは、ナビゲーション機能に固有のサブルーチンを有し、追加アプリとナビゲーション用プログラムとの連携が円滑にできる。APIを公開することにより、ナビゲーション装置メーカ以外のソフトハウスが簡単に追加アプリを作成することができ、ナビゲーション装置に追加する機能を従来よりも大幅に増やすことができる。
(もっと読む)
速度検出装置及び方法
【課題】移動体の速度を自律航法手段により高精度に検出することのできる速度検出装置及び方法を提供する。
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
(もっと読む)
尿素水補給スタンド案内装置
【課題】尿素水補給スタンド案内装置に関し、車両を最適な尿素水補給スタンドに案内する。
【解決手段】尿素水用タンク74を備えた車両の尿素水補給スタンド案内装置1に、尿素水の残存量を検出する尿素水量センサ14と、車両位置情報を検出するGPS受信機11と、表示装置22と、尿素水補給スタンドの位置情報を予め記憶した外部メモリ20と、目的地の位置情報を入力可能な入力装置21と、車両位置情報と目的地の位置情報とに基づいて目的地までの目標距離を算出する目標走行距離算出部32と、尿素水の残存量に基づいて走行可能距離を算出する走行可能距離算出部34と、表示装置22に走行可能範囲内にある尿素水補給スタンドまでの最短経路を表示させる表示装置制御部38とを備えた。
(もっと読む)
走行案内システム、走行案内装置、走行案内方法及びコンピュータプログラム
【課題】車両が目的地に到着したか否かを適切に判定することを可能とした走行案内システム、走行案内装置、走行案内方法及びコンピュータプログラムを提供する。
【解決手段】出発地から目的地までの案内経路を設定し(S3)、設定された案内経路の終端から目的地までの離間距離を取得し(S4)、離間距離が所定距離未満である場合、又は離間距離が所定距離以上であって且つ目的地が特定地点である場合には、経路の終端を基準として車両(移動体)が目的地に到着したか否かを判定するとともに(S6、S15)、離間距離が所定距離以上であって且つ目的地が特定地点以外の地点である場合には、目的地の位置を基準として車両が目的地に到着したか否かを判定する(S9、S15)ように構成する。
(もっと読む)
ナビゲーションシステム及びナビゲーション装置
【課題】投稿された交通情報のうち、古い情報を速やかに消去できるナビゲーションシステム及びナビゲーション装置を提供する。
【解決手段】ナビゲーションシステム1は、地図上のスポットの交通情報に関して投稿された投稿交通情報を配信するサーバ10と、地図に現在位置を表示して経路を案内するナビゲーション装置20と、を備え、ナビゲーション装置20は、現在位置の周辺のスポットについて投稿されている投稿交通情報をサーバ10から取得し地図上に表示する投稿交通情報取得表示手段31,24と、現在位置の周辺について配信されている配信交通情報を受信する配信交通情報受信手段32と、投稿交通情報が投稿されているスポットでの交通状態を配信交通情報に基づいて判定し、当該判定の結果に応じて投稿交通情報を地図上から消去する表示消去手段33とを備える構成とする。
(もっと読む)
車両用投影装置
【課題】運転者の視線移動を抑制した上で、経路案内画像の視認性を向上させることができる車両用投影装置を提供する。
【解決手段】自車両10の現在位置、及び現在位置から設定された目的地までの経路を探索するナビゲーションシステムと、自車両10が経路上の分岐点に乗員が視認可能な程度まで近づいたとき、ナビゲーションシステムで探索された経路情報に基づいて、自車両10を分岐方向へと誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15と、を備えていることを特徴とする。
(もっと読む)
運転支援装置
【課題】 目的地における車両情報によらずに目的地を精度よく判定することを可能とする運転支援装置を提供する。
【解決手段】 現在位置取得部11で取得した車両の現在位置情報等に基づいてその走行軌跡を取得する走行軌跡取得部と、走行履歴記憶部4に格納された情報等に基づいて走行軌跡の履歴情報を取得する履歴軌跡取得部、として機能する軌跡取得部12と、最新の走行軌跡と類似する走行軌跡の履歴情報とを比較する軌跡比較部13と、その相違点に基づいて最新の走行軌跡中における目的地を推定する目的地推定部14と、を備えている。
(もっと読む)
歩行経路案内装置及びシステム
【課題】車両の走行情報に基づいて障害物の有無を判定し、歩行者に対して、歩行可能な適切な歩行経路を案内することのできる歩行経路案内装置及びシステムを提供する。
【解決手段】地図情報に基づいて歩行者の歩行経路を案内する歩行経路案内装置16において、前記地図情報を記憶する地図情報記憶手段42と、車両の走行情報を取得する走行情報取得手段43と、前記地図情報及び前記走行情報に基づき、前記車両が走行する車道に隣接する歩行者用道路に、前記歩行者の歩行を妨げる障害物が有るか否かを判定する障害物有無判定手段38と、前記地図情報を編集し、前記障害物が有ると判定された前記歩行者用道路を前記歩行経路の探索の対象から除外する地図情報編集手段40と、を備え、編集された前記地図情報に基づき、前記歩行者の前記歩行経路を案内する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】案内地点などのエリアの詳細地図を、当該エリアに対する特定のズーム操作またはユーザの接近などの特定の条件等を必要とせずに、ユーザが確認することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、地図上の基準地点に関する基準地点情報を取得し、地図情報に基づき、取得された基準地点情報に基づく基準地点が含まれる所定範囲に存在する所定領域の案内表示用の地図に関する所定領域地図情報を取得し、取得された所定領域地図情報を表示部に表示させる。
(もっと読む)
再生区間抽出方法、プログラムおよび記憶媒体、並びに再生区間抽出装置および輸送機器搭載装置
【課題】適切なダイジェスト再生を行うことができる。
【解決手段】走行時における各イベントを、イベントの優先度を示す優先情報と共に記憶するイベント記憶ステップと、映像データを取得する映像データ取得ステップと、映像データの中から、イベントに該当する特徴区間を特定する特徴区間特定ステップと、特徴区間に基づいて、映像データから再生区間を抽出する再生区間抽出ステップと、を備え、再生区間抽出ステップは、少なくとも一部が重なる2以上の特徴区間の和集合の区間である特定区間が映像データに存在する場合、当該特定区間内の特徴区間については、最も優先度の高いイベントに該当する特徴区間である代表特徴区間のみに基づいて再生区間を抽出する。
(もっと読む)
ナビゲーション装置、制御方法及びプログラム
【課題】実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることが可能なナビゲーション装置を提供する。
【解決手段】道路を含む地図データを記憶する記憶部(1)と、自車両の位置を検出する検出部(2)と、記憶部(1)に記憶された地図データと検出部(2)で検出した自車両の位置とを基に、自車両が走行している道路の画像を表示部(4)に表示する制御部(7)と、を有して構成し、制御部(7)は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路の画像を、自車両が視認可能な視点から見た道路の画像に切り替えて表示部(4)に表示する。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
221 - 240 / 4,676
[ Back to top ]