
Fターム[2F129BB20]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 速度センサ (4,676)
Fターム[2F129BB20]に分類される特許
4,661 - 4,676 / 4,676
マップデータ作成装置、それを備えた移動体、並びにマップデータ作成方法
周囲を撮影するカメラと、GPS受信部と、地図情報が記憶された地図情報記憶部と各部の動作を制御する制御部とを備え、この制御部によって、カメラが撮影した画像データを、GPS受信部によって検知した撮影時の位置情報と関連付け、さらに、位置情報に関連付けた画像データを、地図情報に関連付けてマップデータを作成する。これにより、移動中に撮影した周囲の画像と地図情報とを関連付けたマップデータを作成することができる。 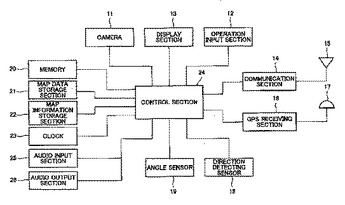 (もっと読む)
(もっと読む)
ナビゲーション装置および経路誘導方法
ナビゲーションサーバ1,地図DB102と、出発地および目的地間の誘導経路を探索する経路探索部104と、誘導経路の道路形状が簡略化された形状簡略道路地図データを作成する形状簡略道路地図作成部106と、地図データにおける誘導経路の形状と形状簡略道路地図データにおける誘導経路の形状との差分が所定量以上ある誘導経路の部分を注意部分として検出する注意部分検出部107と、経路誘導において現在地が注意部分に到達した際にナビゲーション端末2に出力させる、地図データおよび形状簡略道路地図データの注意部分の差分に基づいた誘導注意情報を生成する注意情報生成部108と、簡略道路地図データおよび誘導注意情報を含む配信情報をナビゲーション端末2へ送信する通信部110と、を有する。これにより、誘導経路の視認性を向上させ、かつ誘導方向の誤認識を低減する。 (もっと読む)
高度なナビゲーション性能のための方法およびシステム
ナビゲーションのための方法およびシステムが開示される。一実施例においては、地上局の視野内におけるGPS衛星からのデータがイリジウム衛星などのLEO衛星に再伝送され、必要であれば、ユーザに伝送される前に相互リンクされる。次いで、ユーザは、干渉またはジャミングによるエラーを解決するために、GPS衛星から直接受取ったデータとフィードフォワードされたデータを組合せることができる。代替的には、方法は、ユーザ装置において少なくとも1つの搬送波信号を受信するステップを含み、各々の搬送波信号は別個のLEO衛星によって伝送される。ユーザ装置は、第1の搬送波位相情報を得るよう搬送波信号を処理する。ユーザ装置は、慣性基準ユニットにおいて得られる慣性位置決定を再現する。ユーザ装置は、慣性位置決定および第1の搬送波位相情報に基づいてユーザ装置の位置を導き出す。 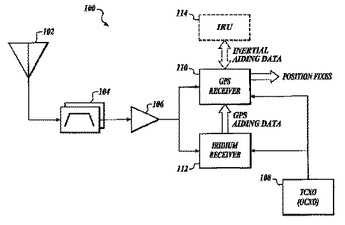 (もっと読む)
(もっと読む)
追尾及び距離制御を改善する方法
追尾及び距離制御を改善するための方法では、能動的な追尾及び距離制御において、近い将来における車両の運転者による車両制御の引継ぎの実現性又は必要性を検出するとともに、運転者による車両制御の引継ぎの実現性又は必要性を検知した場合に、近い将来に引継ぎが差し迫っていることを運転者に知らせるか、或いは運転者の注意を高揚させる。 (もっと読む)
ナビゲーション装置
運転者を常時緊張させない音声案内を行うことが可能なナビゲーション装置を提供することを目的とする。ナビゲーション装置において、システム制御部(19)は、車両の現在位置を検出し、さらに、設定された出発地から目的地への案内経路を探索する。また、システム制御部(19)は、探索された案内経路上で音声案内をすべき各地点毎に、運転者が車両の運転操作を要するか否かに基づいて、重要度を割り当てる。さらに、システム制御部(19)は、音声案内をすべき地点毎に音声メッセージを作成し、割り当てられた重要度に従って、今回作成した音声メッセージに互いに異なる警告音を付加する。スピーカ(13)は、システム制御部(19)で生成された警告音と音声メッセージを出力する。 (もっと読む)
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
ナビゲーション装置
車両内に居る人に位置を分かりやすく提供可能なナビゲーション装置を提供することを課題とする。車両に搭載され、ターンバイターン方式により、又は音声のみを使って車両を案内するナビゲーション装置は、制御部(21)と、近距離無線通信部(14)とを備える。制御部(21)は、車両の位置を導出した後、導出された位置周辺の地図画像データを取得する。近距離無線通信部(14)は、車内空間をカバー可能な通信エリア内に電波を送出可能であって、制御部(21)により導出した位置と地図画像データとを、自身の通信エリア内に位置する移動体通信端末装置(30)に送出する。移動体通信端末装置(30)は、近距離無線通信部(14)により送出された位置及び地図画像データを受信し表示する。 (もっと読む)
自動二輪車用の走行情報蓄積方法および走行情報蓄積システム
【課題】 自動二輪車の走行支援のために適切なバンク角を記憶できる自動二輪車用の走行情報蓄積方法を提供する。
【解決手段】 自動二輪車の走行情報を蓄積する方法であって、自動二輪車の座標データを得る工程(S10)と、自動二輪車の左右バンク角を算出する工程(S20)と、前記座標データと前記左右バンク角とをリンクして記憶する工程(S30)とを包含する、自動二輪車用の走行情報蓄積方法である。
(もっと読む)
ナビゲーション装置および方法、並びにナビゲーションプログラム
ユーザが表示画面等に視線を移すことなく安全に経路を事前に確認することができるナビゲーション装置および方法、並びにナビゲーションプログラムを提供する。 ナビゲーション装置は、出発地から目的地までの経路を探索する経路探索部(22)、探索された経路に基づいて音声により誘導する音声処理制御部(23)、および誘導前に報知する経路の概略を作成する経路概略作成部(25)を備える。音声処理制御部(23)は、音声処理部(19)およびスピーカ(6)を介して、誘導前に音声で経路概略を報知する。ユーザは、運転中等で視線を移せない状況においても安全に経路を事前認識することができる。 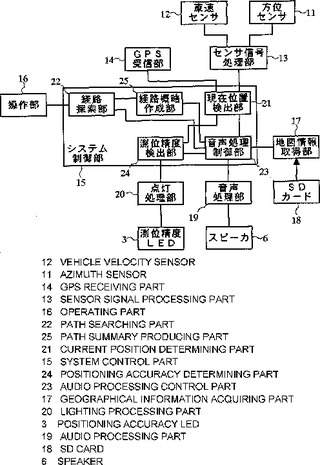 (もっと読む)
(もっと読む)
リサンプル長決定方法と装置
線形対象物をリサンプルするサンプリング点間のリサンプル長Lを、サンプリング点間を線で繋いだリサンプル形状と線形対象物との誤差Erが、予め決めた許容誤差を超えないように設定する。許容誤差を予め定義し、それを超えないようにリサンプル長Lを決定しているので、リサンプル形状は、線形対象物に良く追従する。 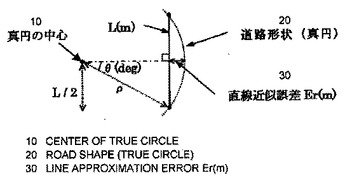 (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
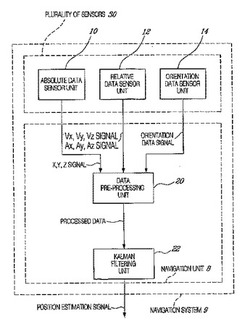
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 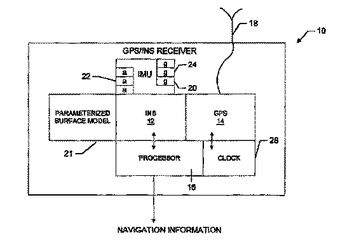 (もっと読む)
(もっと読む)
車両の情報出力システム及び情報出力方法
本発明は、車両の車両状態及び/又は環境状態を検出するための収集手段と、少なくとも2つの出力ポートを使用して情報を出力するための出力手段と、検出されたデータを処理して評価するための及びデータ評価に基づき情報を出力するための手段を制御するための評価及び制御装置とを備える車両の情報出力システムに関する。2つ以上の出力ポートの少なくとも1つを選択することができる。本発明はまた、関連の情報出力方法に関する。本発明によれば、評価及び制御装置は、検出されたデータを評価して、前記第1の情報を出力するために選択された出力ポートを介して、第1の情報の出力と第2の情報の出力との間に衝突が生じるかどうかを確かめ、衝突が検出された場合、第1又は第2の情報を出力するために出力ポートを変更する。あるいは、前記装置は、同一の出力ポートを介して第1又は第2の情報を出力するために要する時間を確認して、より短い時間を要する情報の出力に対して、より長い時間を要する情報の出力を遅らせる。必要時間が同一である場合、より高い優先性を有する情報が最初に出力される。 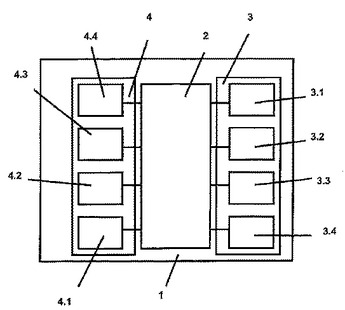 (もっと読む)
(もっと読む)
地図表示方法
車両の走行状況に拘らず、表示される道路地図の内容を容易にかつ明確に把握できるようにする地図表示方法。 表示画面10で表示される要約地図では、自車位置にかかわらず、自車位置11と目的地13とこれら間の誘導経路12とを含む領域が簡略化されて表示される。目的地13から離れているときには、図2Aに示すように、広域の要約地図が表示され、道路14や施設15などのオブジェクトもより制限される。自車位置11が目的地13に近づいてくると、図2Bに示すように、縮尺率が小さくなって中域の要約地図となり、これとともに、表示されるオブジェクトも多くなる。自車位置11が目的地13の近くになると、図2Cに示すように、さらに狭い領域を要約表示するとともに、ほとんどのオブジェクトが表示されることになり、目的地13周辺を詳しく把握することができる。 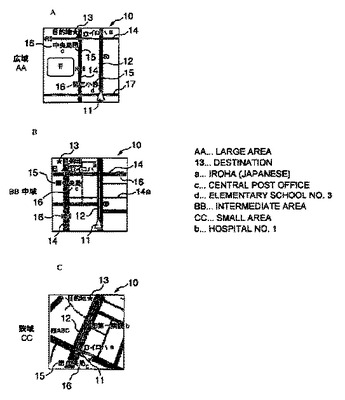 (もっと読む)
(もっと読む)
移動通信端末機の位置情報を用いたナビゲーションサービス提供方法
本発明による移動通信端末機の位置情報を用いたナビゲーションサービス提供方法は、(1)ユーザの第1端末機の位置情報を検出する段階と、(2)検出された前記第1端末機の位置情報を出発地情報として受け取る段階と、(3)所定の目的地情報を受け取る段階と、(4)前記出発地情報と前記目的地情報に基づいて所定の経路情報を出力する段階と、(5)前記出力された経路情報を前記ユーザの前記第1端末機に提供する段階と、(6)前記ユーザの第2端末機でのGPS信号の受信可否を判断する段階と、(7)GPS信号を受信することができる場合、前記GPS信号を介して出力される前記ユーザの位置情報に基づいて前記経路情報を補正する段階と、(8)前記補正された経路情報を前記第1端末機に提供する段階とを含む。 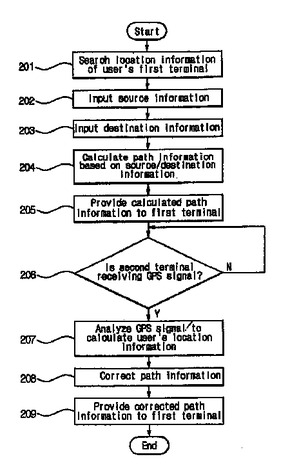 (もっと読む)
(もっと読む)
4,661 - 4,676 / 4,676
[ Back to top ]