
Fターム[2F129BB20]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 速度センサ (4,676)
Fターム[2F129BB20]に分類される特許
1 - 20 / 4,676
情報処理装置
操作者識別装置及び方法並びに車載用ナビゲーション装置
地図表示操作装置
画像表示装置およびナビゲーション装置
レーン案内表示システム、方法およびプログラム
ナビゲーションシステム
放送受信システム
車両制御システム、車両制御装置、車両制御方法及びコンピュータプログラム
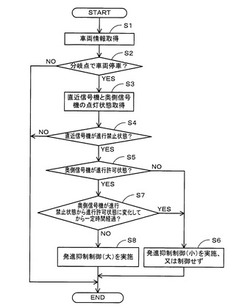
【課題】直近信号機が進行禁止状態であるにもかかわらず車両が誤って分岐点に進入することを防止した車両制御システム、車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点で停車している場合において、フロントカメラ19で撮像した撮像画像に基づいて、車両の進行方向前方の直近に設置された直近信号機と、車両の進行方向前方にあって車両に対して直近信号機よりも遠方に設置された奥側信号機の点灯状態をそれぞれ取得し(S3)、直近信号機の点灯状態が進行禁止状態であって、奥側信号機の点灯状態が進行禁止状態から進行許可状態に変化した場合に、奥側信号機の点灯状態が変化してから一定時間が経過するまでの間において、車両の発進を抑制する制御を行う(S8)ように構成する。
(もっと読む)
ナビゲーション装置

【課題】充電に関するより分かり易い情報を提供することができる。
【解決手段】 ナビゲーション装置は、車両の充電を行う充電スポットに関する情報を記憶する記憶部と、出発地および目的地の入力を受け付ける入力受付部と、前記入力情報を用いて経路を探索する経路探索部と、目的地が車両の充電残量から特定される到達可能範囲にない場合に充電スポットを抽出する充電スポット抽出部と、目的地に到達するために必要な前記充電スポットでの充電量を算出する充電量算出部と、探索した前記経路とともに、抽出した前記充電スポットおよび該充電スポットでの充電量を表示する表示部と、を備える。
(もっと読む)
移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム
【課題】案内分岐点をユーザに対して正確に特定させることが可能となった移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラムを提供する。
【解決手段】車両の進行方向前方に案内分岐点が有る場合に、該案内分岐点や手前分岐点が信号機のカウントを誤り易い条件を満たす誤認分岐点であるか否か判定し、案内分岐点又は手前分岐点が誤認分岐点であって信号機案内を行う為の対策が有ると判定された場合には、信号機のカウントを誤り易い要因と車両から案内分岐点までの間に位置する信号機の数とを用いて該案内分岐点を特定させる『誤認対策信号機案内』を該案内分岐点の案内に設定するように構成する。
(もっと読む)
属性対応ルート特定装置及びその方法、並びに属性対応ルートを特定するためのコンピュータプログラム及びコンピュータプログラムを記録した記録媒体
【課題】車両利用者等の属性に対応したルートを特定する装置及びその方法を提供する。
【解決手段】第1の地域と第2の地域とを繋ぐ第1のルート及び該第1のルートと異なる第2のルートを抽出し、当該第1のルート及び第2のルートの夫々につき、当該ルートを走行する車両のプローブ情報に基づいて、当該車両が特定の属性を有する対象車両であるか判定し、当該ルートを走行する全車両に占める対象車両の割合に基づき、当該対象車両が当該ルートを利用する第1の利用率及び第2の利用率を演算し、演算された第1の利用率と第2の利用率とを比較する。
(もっと読む)
車載信号処理装置および信号処理方法
【課題】車速センサが出力する車速パルスから車速や走行距離を計算する際に用いる係数を、車両上における電波の受信状態が悪い状況であっても直ちに決定可能にする。
【解決手段】車速パルス信号に基づき車速又は走行距離を算出する情報処理部110と、パルス信号の特性を表す速度パルス係数の情報を保持する不揮発性記憶部120と、車両に搭載されるオドメータが表示しているオドメータ数値の入力を受け付けるオドメータ数値入力部113と、互いに異なる2つの地点のそれぞれにおいて入力された2つのオドメータ数値の差分を表す第1の走行距離を算出し、前記2つの地点間の移動に関し入力された前記車速パルス信号と前記速度パルス係数とに基づいて第2の走行距離を算出し、前記第1の走行距離と第2の走行距離とに基づいて前記速度パルス係数を修正する速度パルス係数修正部110とを備える。
(もっと読む)
交通情報提供システム
【課題】プローブ情報を収集して交通情報を生成するシステムにあって、交通情報センタが配信する交通情報と実際の道路状況とが異なる場合に、信頼性の高い交通情報の更新を行う。
【解決手段】交通情報提供システム1は、車両2に搭載されプローブ機能を有する車載器3と、各車両2から送信されるプローブ情報を収集して交通情報を生成し各車両2に配信する交通情報センタ4とを含む。車載器3において、自車両2の走行実績情報と交通情報センタ4から配信された交通情報と間で乖離の有無を判定し、乖離があると判定した場合に該交通情報センタ4に対して乖離情報を送信する。交通情報センタ4側では、同一の道路リンクに関しての乖離情報を複数の車両2から受信することを条件に、当該道路リンクにおける交通情報を更新する。
(もっと読む)
測位装置及びプログラム
【課題】一周波数GPS受信機を用いた場合でも、精度良く測位解を得る。
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
(もっと読む)
ナビゲーション装置
【課題】車線情報を最新の状態に保つための作業量及び車線情報量を低減するとともに、走行車線を正確に求めることのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、移動体の位置を推定する位置推定手段111と、推定された移動体の位置に対応する道路リンク候補点を特定する道路リンクマップマッチング手段121と、分岐周辺の車線情報記憶手段105から道路リンク候補点の前後に存在する各対象分岐の周辺の車線情報を取得する車線情報取得手段124と、取得した車線情報を用いて各対象分岐の周辺の道路リンクの位置誤差を算出する道路リンク位置誤差算出手段125と、取得した車線情報を用いて各対象分岐の周辺の車線間距離を算出する車線間距離算出手段126と、算出した位置誤差と車線間距離を用いて各対象分岐間の車線リンクを作成する分岐間車線リンク作成手段127とを備える。
(もっと読む)
ナビゲーションシステム、地図情報更新方法およびプログラム
【課題】地図情報の更新の必要性に応じた頻度で地図情報の更新要求を行う技術の提供。
【解決手段】記録媒体に記録された地図情報の更新要求を前記地図情報の管理装置に対して出力し、前記管理装置が出力する更新情報によって前記地図情報を更新するにあたり、車両が走行した地点に関する地点関連情報を取得し、前記地点関連情報に前記地図情報の更新を示唆する変化が生じた場合に、前記地図情報の更新を示唆する変化が生じる前よりも前記更新要求が出力される頻度を増加させる。
(もっと読む)
測位装置及びプログラム
【課題】GPS情報とINS情報とを統合して測位する場合に、測位解の信頼度を精度良く計算する。
【解決手段】走行軌跡算出部20で、Mエポック分のGPS情報及びINS情報に基づいて自車両の走行軌跡を算出し、初期値算出部24で、算出した走行軌跡に基づいて、Mエポック分の自車両の位置の初期値を算出する。誤差換算・方程式導出部26で、バンドルアジャストメント方式により、初期値に基づくGPS情報の観測方程式を導出すると共に、INS誤差を、各エポックにおける自車両から見たGPS衛星の方向に投影して擬似距離誤差に換算して、GPS誤差と統合する。測位解計算部28で、観測方程式から測位解を計算すると共に、統合された観測誤差に基づいて信頼度を計算する。
(もっと読む)
車両急速充電時における情報提供装置
【課題】
充電ステーションでのバッテリ充電を要する電動車において、充電ステーションにおける待ち時間に、ユーザに有益な情報を提供する。
【解決手段】
車両の乗員に提供する情報を探索する制御部(10)を備え、制御部(10)は、バッテリ(54)の充電場所に関する指示に応じてバッテリ(54)の充電予定位置を定めると共に、車両内又は車両外の情報源から乗員に提供する情報を探索し、車両が充電予定位置に到着した後、または、充電予定位置においてバッテリ(54)への充電が行われている間に、前記探索した情報を乗員に提供するよう構成されている。
(もっと読む)
車載カメラ及び車載カメラシステム
【課題】車速センサやGPSの精度が低いと予測される状況であっても、自車の位置及び車速を精度良く検知可能である車載カメラを提供することである。
【解決手段】自車両の前方または後方の画像を取得する画像撮像装置と、画像から特徴点を抽出する画像認識部と、検出された自車の車速情報及び現在位置情報の精度を判定する車速判定部と、特徴点と過去に抽出された過去特徴点との間の距離を測定する特徴点間距離測定部と、特徴点と予め記録装置に登録された登録特徴点に基づいて、自車位置を補正する自車位置補正部と、特徴点間距離測定部で測定された距離と、距離間を通過する時間と、に基づいて車速を測定し、補正する車速補正部と、を有する。
(もっと読む)
評価表示システム、方法およびプログラム
【課題】今回の走行区間における走行効率の評価と過去の走行効率の評価とを運転中に容易に比較することが可能な技術の提供。
【解決手段】表示部に車両の現在位置とともに当該現在位置の周辺の地図を表示し、車両の今回の走行における単位区間毎の走行効率と達成目標とを比較した結果を今回効率評価として取得し、今回の走行よりも過去の走行における単位区間毎の走行効率と達成目標とを比較した結果を過去効率評価として取得し、地図上に単位区間毎の今回効率評価と過去効率評価とを併せて表示する。また、今回効率評価が過去効率評価よりも改善した場合、達成目標をより高い目標に修正する。
(もっと読む)
1 - 20 / 4,676
[ Back to top ]