
Fターム[2F129BB21]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 方位センサ (3,052)
Fターム[2F129BB21]に分類される特許
2,101 - 2,120 / 3,052
車両用ナビゲーション装置
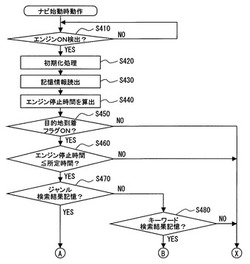
【課題】所望の施設に到着しても、何らかの事情で他の施設を探す必要がある場合に、他の施設の検索を簡単に行うことが可能な車両用ナビゲーション装置を提供する。
【解決手段】複数の施設情報を示す検索結果画面において、一の施設が選択された目的地に設定された場合、その検索結果画面を記憶しておく。そして、車両が目的地施設に到着したとき、車両のエンジンがオフされてから、再びオンされるまでのエンジン停止時間を所定時間と比較して、ユーザの目的地施設の滞在時間を推定する。そして、目的地施設におけるユーザの滞在時間がその施設を利用するには短か過ぎる場合、他の代替施設を探す可能性が高いとみなして、記憶した検索結果画面を表示する。これにより、ユーザは、煩雑な操作を行わずとも、当初の目的地施設の代わりとなる施設を簡単に探すことができる。
(もっと読む)
車載用ナビゲーション装置

【課題】予め探索した経路前方に分岐点があって、車線変更が必要な場合、変更先の車線が渋滞しているときは、無理な車線変更による危険を回避できるようにする。
【解決手段】メモリ制御部6で、道路地図情報を読み込み、車両位置検出部7で、当該車両の現在位置を車線単位で検知し、渋滞情報処理部8で、道路の渋滞情報を入手する。そして、道路地図情報と渋滞情報とに基づいて目的地までの最適経路の探索を行い、探索された経路をディスプレイ13に表示して経路誘導を行う。また、車線判定手段により車線変更が必要であると判定されたとき車線変更の案内を行う。そのような車載用ナビゲーション装置において、経路前方に左折又は右折すべき分岐点があって、前記車線判定手段が、車線変更が必要であると判定しても、現在位置から分岐点までが渋滞しているときは、車線を変更しなくてもよい最適経路を再探索する。
(もっと読む)
ナビゲーション装置、及びプログラム
【課題】車両が特定種別の道路へ通り抜け可能な通行経路を搭乗者が容易に把握可能な技術を提供する。
【解決手段】CPU11は、位置と道路網と道路の種別とを示す地図データに基づいて、車両の位置から予め指定された指定範囲内に存在する脇道が、主要道路へと車両が通り抜けることが可能な通行経路を形成しているか否かを判定し、その判定結果に基づいて、通行経路を車両の搭乗者に案内する(S100〜S125,S130,S150)。
(もっと読む)
地図表示装置
【課題】複数のランドマークを視認性よく表示し、ユーザが希望するランドマークを容易に特定することのできる地図表示装置を提供する。
【解決手段】入力部103は、ユーザから指示の入力を受け付け、地図データ記憶部101は、ランドマークの位置情報を含む地図データ及び複数の属性についてランドマーク毎に属性値を記憶する。重複度算出部106は、少なくとも1以上の属性毎に、ランドマークを属性値に応じて複数のグループに分類し、各グループを包含する各エリア相互間の重複度を算出する。選別属性決定部107は、少なくとも1以上の属性のうち、重複度算出部により算出された重複度が最小となる属性を選別する。表示部104は、地図データに基づいて地図を表示し、描画処理部108は、選別属性決定部により選別された属性について、各エリアを地図に表示させる。
(もっと読む)
描画システム
【課題】運転者が一目瞭然で方面標識に関する交差点での進行方向を知ることが可能となる描画システムを提供する。
【解決手段】ナビゲーションECU3は、方面標識の地図上での絶対位置座標、方面標識の地上からの高さ情報等の標識情報に基づいて、前方撮像用カメラ14の撮像画像内の方面標識を画像処理により認識し、自車両の進行方向に合致する方面名称や矢印マークをパターンマッチング等により認識する(S6)。また、ナビゲーションECU3は、該撮像画像内の方面標識上における進行方向に合致する方面名称や矢印マークと自車両との正確な相対位置関係を求め、この方面名称や矢印マークを指し示す所定照射形状のマークを描画する描画目標位置の座標データを算出して、自車位置や自車方位からレーザ照射角度を決定し、レーザー描画装置4により所定照射形状のマークを描画する(S7〜S9)。
(もっと読む)
経路探索装置
【課題】走行経験の有無に関わらず、運転者に応じた運転難易度を考慮した快適な走行経路を探索する。
【解決手段】車両が所定のイベント(右左折等)の発生地点を通過する際に、運転者の生体情報(心拍等)を測定する。生体情報から異常状態が検出された場合、コスト設定テーブルにおける該当するイベントに対応づけられた苦手コストをアップする。生体情報から異常状態が検出されない場合、該当するイベントに対応づけられた苦手コストをダウンする。このようにしてコスト設定テーブルの更新を行う。一方、経路探索を行う場合、経路探索用のコスト計算の際に、コスト設定テーブルを用いて、イベントが存在する区間についてのコストを変更して計算を行う。
(もっと読む)
運転支援方法及び運転支援装置
【課題】積雪状況に応じて、運転支援画像を表示する運転支援方法及び運転支援装置を提供する。
【解決手段】運転支援システム1の制御装置2は、経路データ17及び地図描画データ18を記憶した地理データ記憶部16と、積雪データWを取得し、車両が交差点に接近した際に、積雪データWに基づき、運転者の視界状況を判断するとともに、積雪により良好な視界状況でないと判断した際に、カメラ3を制御して、進行方向の車両の周辺を撮像した映像信号を入力するCPU10と、入力した映像信号に基づく画像をディスプレイ5に出力する画像プロセッサ20とを備えた。
(もっと読む)
自車位置測定装置
【課題】本発明は、自車位置測定装置に係り、自車位置の精度をある程度高精度に維持しつつ地物認識の処理負担を軽減することにある。
【解決手段】地図データベースに情報が格納される道路上の地物のうち自車両が今後走行するエリアにおける特徴的な地物、例えば、支援制御の目標対象物に応じた複数の道路種類ごとの出現可能性の高い地物の配置パターンを参照して出現頻度の高い地物を、自車位置補正のために必要な認識すべき地物として設定する(ステップ150)。そして、その設定された地物を認識し、その認識結果に基づいて自車位置をGPS及び走行軌跡に基づくものから補正する。
(もっと読む)
車両用画像処理装置
【課題】車載カメラによって撮像された画像の視認性を向上させる。
【解決手段】車載カメラによって撮像された画像のうち、ユーザにとって不必要であると考えられる領域に対してマスキング処理を施し、マスキング処理を施した画像を表示する。
(もっと読む)
交通メッセージに広告を与える方法、サポート装置、読み取り可能な媒体、及びデータ構造
【課題】交通チャンネルで広告を与える技術を提供する。
【解決手段】交通メッセージに広告を与える技術であって、道路網の位置記述の交通状態を有する交通データを得る(704)ことを含む技術が提供される。交通メッセージ供給者により指定された位置記述に関連した位置参照コードと、この位置参照コードに関連した広告参照コードが評価され(706), (714)、その後、広告参照コードが存在するかどうかの決定(716)がなされる。もしそうであれば、位置参照コード及び前記広告参照コードを有する交通メッセージが発生される(710)。
(もっと読む)
駐車場マップ作成方法、駐車場案内方法及びナビゲーション装置
【課題】駐車場マップを自ら作成することができる駐車場マップ作成方法、駐車場案内方法及びナビゲーション装置を提供する。
【解決手段】ナビゲーションシステム1は、自車両が駐車場に進入した際に、画像プロセッサ20に基づき、駐車枠の位置を示したマップデータ26を生成し、マップデータ26を駐車場データ記憶部24に記憶し、自車両がその駐車場に再度進入した際に、マップデータ26を読み出してディスプレイ3にマップを表示し、駐車場内を案内する。
(もっと読む)
車載用ナビゲーション装置
【課題】予め探索した経路前方に右折交差点があって、該交差点における対向車線が渋滞している場合、該交差点での右折を取り止めて、右折のための長い待ち時間と危険を回避できるようにする。
【解決手段】車載用ナビゲーション装置は、メモリ制御部6で、記憶媒体から道路地図情報を読み込み、車両位置検出部7で、当該車両の現在位置を検知し現在位置情報を出力し、渋滞情報処理部8で、前記道路地図情報に含まれる道路の渋滞情報を入手する。そして、前記道路地図情報と渋滞情報とに基づいて目的地までの最適経路の探索を行い、探索された経路をディスプレイ13に表示して経路誘導を行う。探索された経路の前方に右折すべき交差点が存在し、かつ、前記渋滞情報が、該交差点の対向車線が渋滞していることを示している場合、該交差点で右折以外を選択して最適経路を再探索する。
(もっと読む)
対象物認識装置
【課題】本発明は、対象物認識装置に係り、道路上の対象物の認識に要する処理負荷を軽減することにある。
【解決手段】GPSや車速,舵角等による走行軌跡に基づいて自車両の位置を測位すると共に、カメラ撮像画像を用いた対象物の認識結果に基づいて自車両の位置を測位する。また、主に車両の移動距離が長くなるほど低下する自車両の位置を測位するうえでの測位精度を算出する。予め地図データベースに自車両の認識すべき道路上の対象物の位置データを格納する。そして、測位される自車両の位置、地図データベースに格納されている認識すべき対象物の位置、及び算出される自車位置の測位精度に基づいて、対象物を認識すべき道路の認識範囲を設定する。この設定された認識範囲においてカメラ撮像画像を処理して対象物を認識する。
(もっと読む)
車両位置検出装置
【課題】演算処理時間に起因した誤差要因を適切に排除して、現時点の車両の位置を高精度に検出すること。
【解決手段】本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、車両外に存在する特定の対象物の位置情報を記憶した記憶手段30と、前記特定の対象物を検出する対象物検出手段32と、前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
(もっと読む)
画像表示装置
【課題】施設に係る画像とその案内との対応付けの明確性および施設に係る案内の視認性の両立を図ることができなかった。
【解決手段】矩形領域が、施設名称の表示座標を矩形領域の中心となるように定義される。また、矩形領域の辺のうち施設画像の表示座標との距離が最も短くなる最短辺が演算される。また、最短辺上の異なる2座標が定義される。さらに、施設画像の表示座標と異なる2座標とをそれぞれ結ぶ直線が定義される。このように定義された吹き出しをディスプレイ32に表示させるための吹き出しデータが生成される。画像プロセッサ17は、吹き出しデータに従って、VRAM18の記憶領域に吹き出しを描画し、VRAM18上のデータをディスプレイ32に転送する。
(もっと読む)
車両用測位情報更新装置
【課題】本発明は、車両用測位情報更新装置に係り、実行する支援制御の特徴やレベルに合わせて道路地図データや自車両位置などの測位情報を適切に更新することで、その支援制御を適切に実行させることにある。
【解決手段】自車両の位置に応じて実行される支援制御を適切に実行するうえで要求される自車両位置の測位精度に基づいて、自車両の位置を補正するマップマッチングの実行条件を設定する(ステップ122)。具体的には、要求される測位精度が高くその誤差が小さいほどマップマッチングの実行頻度が多くなるように設定する。そして、その設定された実行条件に従ってマップマッチングを行う(ステップ124)。
(もっと読む)
入力システム
【課題】 表示装置にて表示される地図上の勾配を、表示画面上の操作部の操作を行なわない場合においても認識することができる入力システムを提供する。
【解決手段】 車両に搭載される地図表示装置400の入力システム1であり、画面表示されたポインタ410を、同じく画面表示された地図上の予め定められた経路405に沿って相対移動させるに伴い、該経路405上の勾配値変化を反映した形で操作部21の中立角度位置が変更するよう駆動する。
(もっと読む)
移動体端末装置、移動体端末装置の制御方法、移動体端末装置の制御プログラム、および移動体端末装置の制御プログラムを記録した記録媒体
【課題】本願の課題の一例は、複数の移動手段を利用する場合にも、移動手段に応じたアプリケーションプログラムを切替ることにより、移動手段に応じたサポートを行なう移動体端末装置、移動体端末装置の制御方法、移動体端末装置の制御プログラム、および移動体端末装置の制御プログラムを記録した記録媒体を提供することにある。
【解決手段】本実施形態に記載の移動体端末装置は、移動手段によって移動する移動体端末装置の状態情報を検知するセンサ類と、センサによって検知された状態情報に基づいて、移動体端末装置の移動手段を複数の候補とし、それぞれの移動手段候補に対して重みづけをし、点数化し、積算演算することによって移動手段を判断する移動状態判断手段と、移動状態判断手段によって判断される移動体端末装置の移動手段に基づいて、移動体端末装置において必要とされるアプリケーションプログラムを選択して、アプリケーションプログラムを実行する構成を有している。
(もっと読む)
支援制御装置
【課題】本発明は、支援制御装置に係り、対象物位置に応じて実行される支援制御を、位置測位の誤差精度に対応して適切に実行させることにある。
【解決手段】マップマッチングの実行履歴の情報及び地図データベースの更新履歴の情報に基づいて、自車両の位置を測位するうえでの精度誤差を算出すると共に、その算出した精度誤差に基づいて、所定のマップを参照して、測位を行ううえでの精度誤差レベルを複数の段階的なものから特定する。そして、自車両の位置に応じて実行される支援制御の制御レベルを、その特定した精度誤差レベルに応じて変更させる。
(もっと読む)
消費カロリー算出機能付ナビゲーション装置
【課題】 車両が走行を開始する前に出発地点から目的地点に到着するまでに運転者が消費するカロリーの予測を行い、運転者が希望する消費カロリーに見合った経路案内を行うナビゲーション装置の提供する。
【解決手段】 経路設定手段で設定された経路により現在位置から目的地点に到着するまでの走行時間及び運転者が行う操作を運動量予測部により予測し、走行時間と操作量に対応する消費カロリーを消費カロリー情報及びユーザー情報を備えた消費量データベースの情報に基づいて算出する。
(もっと読む)
2,101 - 2,120 / 3,052
[ Back to top ]