
Fターム[2F129BB21]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 方位センサ (3,052)
Fターム[2F129BB21]に分類される特許
3,041 - 3,052 / 3,052
マップデータ作成装置、それを備えた移動体、並びにマップデータ作成方法
周囲を撮影するカメラと、GPS受信部と、地図情報が記憶された地図情報記憶部と各部の動作を制御する制御部とを備え、この制御部によって、カメラが撮影した画像データを、GPS受信部によって検知した撮影時の位置情報と関連付け、さらに、位置情報に関連付けた画像データを、地図情報に関連付けてマップデータを作成する。これにより、移動中に撮影した周囲の画像と地図情報とを関連付けたマップデータを作成することができる。 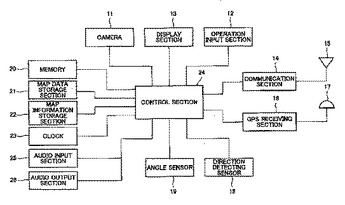 (もっと読む)
(もっと読む)
ナビゲーション装置および経路誘導方法
ナビゲーションサーバ1,地図DB102と、出発地および目的地間の誘導経路を探索する経路探索部104と、誘導経路の道路形状が簡略化された形状簡略道路地図データを作成する形状簡略道路地図作成部106と、地図データにおける誘導経路の形状と形状簡略道路地図データにおける誘導経路の形状との差分が所定量以上ある誘導経路の部分を注意部分として検出する注意部分検出部107と、経路誘導において現在地が注意部分に到達した際にナビゲーション端末2に出力させる、地図データおよび形状簡略道路地図データの注意部分の差分に基づいた誘導注意情報を生成する注意情報生成部108と、簡略道路地図データおよび誘導注意情報を含む配信情報をナビゲーション端末2へ送信する通信部110と、を有する。これにより、誘導経路の視認性を向上させ、かつ誘導方向の誤認識を低減する。 (もっと読む)
船舶の制御システムを検査するための方法及びシステム
船舶(4)の制御システム(2)を検証するための方法であって、上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及びコマンド入力装置(10)からのコマンド信号(9)を受信するとともに、応答として、制御信号(13)をアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態を維持する方法において、時間(t0)中に、実際のセンサ信号(実センサ信号)(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号を、検査信号源(41)からの人工の測定値(7a’、7b’、7c’、……)の検査シーケンス(T0)と置き換えるステップと、人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(SO)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、検査シーケンス(T0)に対する応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップとを含み、その後の時間(t1、t2、t3、……)において、制御システム(2)に対して入力される検査シーケンス(T0)を使用して、その後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されているか否かを検証するという目的をもっていることを特徴とする方法。  (もっと読む)
(もっと読む)
携帯電話を通して目標位置の方向を取得するための方法
本発明は、携帯電話を通して目標位置の方向を取得するための方法を開示するものであって、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報を取得する過程と、携帯電話の画面に表示されるこの地理的子午線の角度及び現在位置の地理的子午線を決定する過程と、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報に従って現在位置から目標位置への方向を決定する過程と、この方向と地理的子午線との間の仰角を決定する過程とを含む。その画面上に表示される地理的子午線の角度とその仰角とに従って、携帯電話は、現在位置から目標位置への携帯電話の画面上に表示される方向を決定し、表示方向に従って画面上の目標位置の方向を表示する。本発明は、ユーザに目標位置の方向を提供できない既存の携帯電話の問題を解決する。ユーザは、携帯電話を通して目標位置の方向を確認することができる。 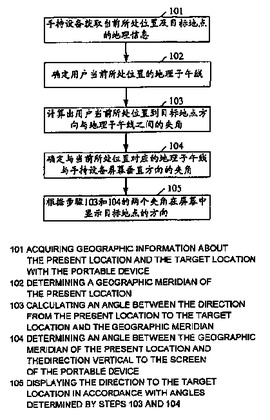 (もっと読む)
(もっと読む)
二重積分によって計算された測定に関連した絶対位置測定を使用することにより固体の移動を検出するための方法
本発明は、二重積分によって計算された測定に関連した絶対位置測定を使用して、固体の移動を検出するための方法に関するものであって、例えば、人体の移動の検出を意図している。本発明による方法においては、固体(2)の加速度を測定し、この測定の二重積分を行い、これにより、固体の第1並進移動に関する順次的な値を獲得し、さらに、特に回転といったような固体の少なくとも1つの第2自由度に関するの絶対位置測定を行う。本発明においては、回転測定を、並進移動測定へと変換し、並進移動測定を使用して第1並進移動を修正する。  (もっと読む)
(もっと読む)
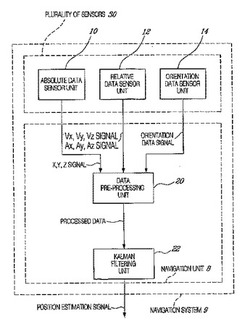
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
ナビゲーション装置
運転者を常時緊張させない音声案内を行うことが可能なナビゲーション装置を提供することを目的とする。ナビゲーション装置において、システム制御部(19)は、車両の現在位置を検出し、さらに、設定された出発地から目的地への案内経路を探索する。また、システム制御部(19)は、探索された案内経路上で音声案内をすべき各地点毎に、運転者が車両の運転操作を要するか否かに基づいて、重要度を割り当てる。さらに、システム制御部(19)は、音声案内をすべき地点毎に音声メッセージを作成し、割り当てられた重要度に従って、今回作成した音声メッセージに互いに異なる警告音を付加する。スピーカ(13)は、システム制御部(19)で生成された警告音と音声メッセージを出力する。 (もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
ナビゲーション装置および方法、並びにナビゲーションプログラム
ユーザが表示画面等に視線を移すことなく安全に経路を事前に確認することができるナビゲーション装置および方法、並びにナビゲーションプログラムを提供する。 ナビゲーション装置は、出発地から目的地までの経路を探索する経路探索部(22)、探索された経路に基づいて音声により誘導する音声処理制御部(23)、および誘導前に報知する経路の概略を作成する経路概略作成部(25)を備える。音声処理制御部(23)は、音声処理部(19)およびスピーカ(6)を介して、誘導前に音声で経路概略を報知する。ユーザは、運転中等で視線を移せない状況においても安全に経路を事前認識することができる。 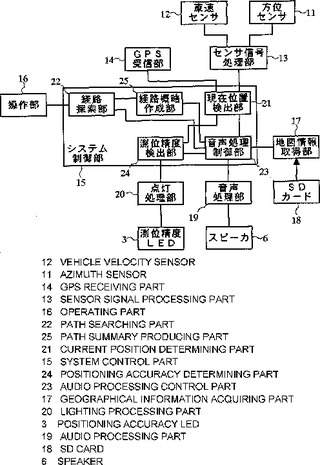 (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
移動通信端末機の位置情報を用いたナビゲーションサービス提供方法
本発明による移動通信端末機の位置情報を用いたナビゲーションサービス提供方法は、(1)ユーザの第1端末機の位置情報を検出する段階と、(2)検出された前記第1端末機の位置情報を出発地情報として受け取る段階と、(3)所定の目的地情報を受け取る段階と、(4)前記出発地情報と前記目的地情報に基づいて所定の経路情報を出力する段階と、(5)前記出力された経路情報を前記ユーザの前記第1端末機に提供する段階と、(6)前記ユーザの第2端末機でのGPS信号の受信可否を判断する段階と、(7)GPS信号を受信することができる場合、前記GPS信号を介して出力される前記ユーザの位置情報に基づいて前記経路情報を補正する段階と、(8)前記補正された経路情報を前記第1端末機に提供する段階とを含む。 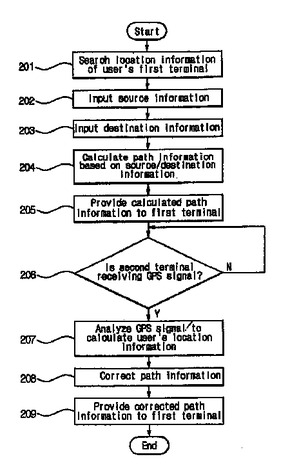 (もっと読む)
(もっと読む)
ナビゲーションシステム
本発明はナビゲーションシステムに関し、該ナビゲーションシステムは、位置データを受信し、送受信装置(34)を有するモバイル受信ユニット(3)を備える。送受信装置は、受信された位置データを自動車(1)内に配置された中央制御ユニット(2)に無線で伝送し、中央制御ユニットは、受信された位置データをさらなる処理のために準備する。受信ユニット(3)は、位置決定のための位置データを、ブルートゥース、ワイヤレスLAN、赤外線、GSM、GPRSおよび/またはUMTSを介して、中央制御ユニット(2)に伝送する。 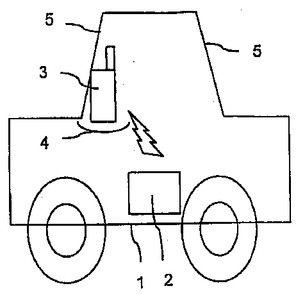 (もっと読む)
(もっと読む)
3,041 - 3,052 / 3,052
[ Back to top ]