
Fターム[2F129BB21]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 方位センサ (3,052)
Fターム[2F129BB21]に分類される特許
401 - 420 / 3,052
加速度算出方法、位置算出方法及び加速度算出装置
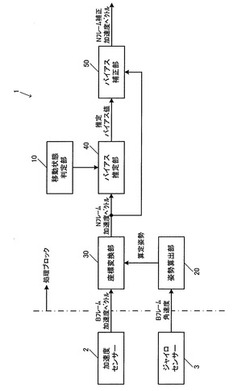
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
車両用経路案内装置

【課題】渋滞していない場合であっても、経路に関する適切な案内を行うことができる車両用経路案内装置を提供すること。
【解決手段】車両用経路案内装置は、車両に搭載されるカーナビ100と、車両の外部のセンター300に設けられたセンター側装置310を備えるものである。カーナビ100の制御装置10は、推奨経路を探索し、その推奨経路から重み付け情報を要求する交差点を決定して、センター側装置310に対して重み付け情報を要求する(S30〜S32)。そして、センター側装置310から、実際に車両が交差点を右折又は左折したときの通過時間に基づいた重み値を含む重み付け情報を、受信すると、受信した重み付け情報を考慮して経路を再探索して、経路案内を開始する(S33〜S35)。
(もっと読む)
ナビゲーション装置
【課題】行き先を示す画像を路面などへ投影する際に視認性を向上させること。
【解決手段】投影可能な範囲の暗部の範囲を検出する暗部範囲検出部と、プロジェクターが投影する範囲に、所定の大きさの暗部を含むようにプロジェクターのズーム倍率を決定するズーム倍率決定部と、検出した暗部の中に画像を投影する位置を設定する投影位置決定部と、投影位置決定部の設定した位置にナビゲーションのための画像を配置する投影画像生成部とを有し、投影可能な範囲の暗部にナビゲーション用画像の投影を行うとともに、ナビゲーション用画像が投影できる範囲内でプロジェクターの光束を最小に絞るよう、ズーム倍率を調整する。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】案内経路上の交差点やガイダンスポイント等の分岐からの代替経路を事前に取得しておくことで、オフルート時のナビゲーションを素早く行うことができるナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、ナビゲーションサーバ側で、案内経路を探索し、案内経路上の分岐点を抽出し、当該分岐点から目的地までの代替経路を探索し、ナビゲーション装置側で、ナビゲーションサーバから送信される案内経路データおよび代替経路データを受信し、案内経路データに基づく経路案内を実行し、代替経路上に現在位置が存在するか否か判定し、代替経路上に現在位置が存在すると判定された場合、当該代替経路の代替経路データを新たな案内経路データとして設定し、当該案内経路データに基づく経路案内を実行する。
(もっと読む)
車載用電子機器及びプログラム
【課題】車両の搭乗者が、表示内容を直感的に理解できる車載用電子機器等を提供する。
【解決手段】(a)に示すように、三軸の加速度センサから取得した車両の加速度が、加速のときはガイドスケール下端部70b方向へ、減速のときはガイドスケール上端部70a方向へ、左カーブによる加速度が検出された場合にはガイドスケール右端部70c方向へ、右カーブによる加速度が検出された場合にはガイドスケール左端部70d方向へといった具合に、検出された車両状態としての速度の変位(加速度)をその車両の搭乗者(例えばドライバー)が認識する方向へ3Dオブジェクト61・62の表示位置を変位させて表示する。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】経路なし走行モード時や、交差点付近に現在位置がある場合であっても、交差点の中心に現在位置を固定表示させることなく、より現実の現在位置に忠実な現在位置の表示を行うことができるナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、対象車両の現在位置情報により、道路ネットワークデータを用いて、現在位置情報により道路ネットワークデータ上の交差点付近における対象車両の旋回を検出し、交差点付近における対象車両の旋回を検出した場合に、当該交差点への進入リンクおよび当該対象車両の旋回方向の退出リンクの双方に対し相対的な傾きが近似的に0で接する軌道曲線を取得し、表示部を介して、取得した軌道曲線上に現在位置情報を表示させる。
(もっと読む)
車両位置表示装置
【課題】もし実際よりも早く出発していたらどこまで行けたのか、または、もし実際よりも遅く出発したらどこまで来ていたのかに関する情報を車両の乗員に提供する。
【解決手段】車両の出発地点と、出発時刻と、出発地点および車両の現在位置を通る走行経路と、を記憶し、また、出発時刻よりも前または後にずれた仮想出発時刻を設定し(ステップ105)、走行経路上を仮想出発時刻に出発地点から走行したと仮定した場合の、現在時刻における車両の位置である仮想現在位置を特定し(ステップ110〜165)、特定された仮想現在位置を表示する(ステップ170)。
(もっと読む)
画像生成装置
【課題】既存の車載装置によって生成される画像を活かしつつ、表示器の表示性能を発揮させることができる画像生成装置の提供。
【解決手段】車両の乗員に向けて設置される液晶ディスプレイ装置40を備え、当該液晶ディスプレイ装置40により表示される表示画像1を生成する画像生成装置100である。画像生成装置100の制御回路20は、ナビゲーション装置50において表示画像1よりも少ない画素数にて生成される主画像2aの映像信号を取得する。制御回路20は、表示画像1と主画像2aとの画素数の差を補完する補完画像2bを生成する映像描画部22と、主画像2a及び補完画像2bを合成することにより、主画像2a及び補完画像2bが並列された表示画像1を生成する映像合成部23を有し、表示画像1の映像信号を液晶ディスプレイ装置40に出力することにより、当該装置40に表示画像1を表示させる。
(もっと読む)
経路案内装置
【課題】逸脱しにくい適切な案内経路を設定することができる経路案内装置を提供すること。
【解決手段】出発地から目的地までの案内経路を設定して、この案内経路によって出発地から目的地までの経路案内を行うカーナビ100であって、カーナビ100の制御装置10は、出発地から目的地までの案内経路を探索する(S20)。この探索した案内経路において、記憶装置60に記憶された逸脱道路情報の交差点及び道路と同一、又は同様の交差点及び道路があるか否かを検索する(S21)。そして、この検索で抽出された逸脱道路情報が示す退出道路に対して、案内経路に採用する際の優先度を、逸脱が検出される前よりも下げて案内経路を再探索する(S23)。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】データ検索条件の入力手段として、撮影画像中に存在する任意の地点をユーザが選択可能な操作画面を提供することができ、当該操作画面上で選択された地点に関するデータ検索を正確かつ容易に行うことができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、撮影画像から識別された表示内容に基づいて、当該撮影画像に対応する地図データを特定し、当該地図データに含まれる名称情報の表示領域を選択可能領域として設定した、特定地点を選択するための操作画面を生成し、表示部に表示された操作画面上の選択可能領域のうち、選択された選択可能領域に対応する名称情報を設定し、当該名称情報に合致する案内情報を抽出し、当該案内情報を含む生成された案内画面を表示部に表示する。
(もっと読む)
ナビゲーション装置
【課題】自動走行路線を自動運転中に自動運転から手動運転への切替を行う場合に、より安全なナビゲーションを実現する。
【解決手段】自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替える(S150)。例えば、通常は高速道路上の700m手前で実行するが、変更後は高速道路上の1500m手前で実行するといった具合である。一方、自車が自動走行路線を走行中ではないと判断された場合には(S120:NO)、分岐案内タイミングを切り替える(つまり早める)必要がないと判断する。そして、経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミング(分岐案内タイミング)で実行する(S130)。
(もっと読む)
移動状態判別装置、移動状態判別方法およびプログラム
【課題】 利用者の移動状態の判別、特に、レールに沿って走る乗物で移動している状態と、道路上を走る乗物で移動している状態との判別を行うことのできる移動状態判別装置、移動状態判別方法およびプログラムを提供する。
【解決手段】 加速度センサの出力から進行方向に対して横方向の成分で且つ所定の周波数成分(1〜3Hz)の加速度を抽出し、この成分の大きさが第2閾値より大きくなければレールに沿って走る乗物により移動している状態と判定し、第2閾値より大きければ道路上を走る乗物により移動している状態と判定する。
(もっと読む)
車載表示装置
【課題】地図データの更新を必要とすることなくガソリンスタンドの状況変化に対応させて、各ガソリンスタンドのガソリン価格をガソリンスタンドのブランドを表すアイコンと並べて表示できるようにする。
【解決手段】表示部13に表示させるガソリンスタンドのブランドと地図データに格納されたガソリンスタンドのブランドを示すアイコンの対応関係を規定した対応関係情報に基づいて、放送波に含まれるガソリン価格情報に従って表示部に表示させるガソリンスタンドのブランドを決定し、このブランドに対応するアイコンを地図データより読み出して、ガソリン価格とアイコンを並べたガソリン価格表示画面を表示部13に表示させる。
(もっと読む)
誘導経路探索方法及び誘導経路探索装置
【課題】過去に通り過ぎた場所にもう一度再訪したいニーズを満たす。
【解決手段】車両が走行すると、走行履歴生成部によって走行履歴情報が生成される。その走行時に、コンテンツ再生部によってコンテンツが再生されると、記憶媒体が、コンテンツ情報と走行履歴情報とを互いに対応付けて記憶する。その後、タッチパネルを用いて記憶媒体に記憶されたコンテンツ情報を指定すると、探索制御部の制御に基づき、経路探索部が指定されたコンテンツ情報に対応付けられた走行履歴情報を用いて目的地を設定するとともに、その設定された目的地までの経路を探索する。そして、その探索された経路に従って、誘導部が車両を誘導する。
(もっと読む)
ハンドヘルド対象物選択装置
【課題】ユーザの入力時にデバイスの位置を決定する地理位置プロセッサを有する対象物選択装置を提供する。
【解決手段】対象物選択装置100は、また、ユーザの入力時にデバイス120からの方位を決定する方位決定プロセッサ104を有する。対象物選択装置100は、また、入力時に決定したデバイス120の位置及び方位に対応する一組の対象物に関連する情報を検索する地理コンテンツ検索システム118を有する。
(もっと読む)
ナビゲーションシステム
【課題】自車両の前方を走行する他の車両を追い越す際、自車両及び前方の他車両に対して、追い越しのための適切な通知を行うことのできるナビゲーションシステムを提供する。
【解決手段】自車両の現在位置を検出する現在位置検出手段17と、現在位置及び地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段14と、自車両に対して前記特定車線を案内する特定車線案内手段26,27と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段28と、を備えるナビゲーションシステムにおいて、特定車線接近検出手段14が特定車線の接近を検出したとき、特定車線案内手段26,27に前記特定車線を案内させる制御を行う一方、追い越し通知手段28による前記他車両への追い越し通知を禁止する制御を行う制御手段14を備える。
(もっと読む)
情報提供システム、路上装置、車載装置及び車両
【課題】 ドライバがFAST感応制御が実施されている交差点に流入しないように、ドライバに適切な情報を提供することができる情報提供システムを提供する。
【解決手段】 路上装置1は、交通信号機3から速度規制や車線規制などの交通規制情報を含む交通情報、各交差点がFAST感応制御が許可されている交差点であるか否かを識別するためのFAST感応交差点情報を受信し、これらの情報を車載装置2に送信する。車載装置2は、受信したFAST感応交差点情報に基づいて、FAST感応制御が許可されている交差点をなるべく経由しないように目的地までの誘導経路を探索し、この誘導経路を道路地図に重畳した画像データをモニターに表示する。
(もっと読む)
位置情報記録装置、同装置を備える撮像装置および位置情報記録方法
【課題】 電波受信不能時には相対的な位置情報を記録し、電波受信が可能になったときに相対的位置情報を測位情報に変換し記録する位置情報記録装置等に関する。
【解決手段】 無線信号を受信する受信手段、測位情報を記録する合図を発する操作手段、無線信号に基づいて地理的位置を測位し測位情報を算出する位置情報算出手段、測位情報を記録する測位情報記録手段、基準位置からの方向と移動距離からなる変位情報を算出する移動軌跡情報算出手段、合図が発せられたとき測位情報が得られていないときには変位情報によって基準となる位置からの相対的な位置に係る相対位置情報を算出し合図に係る情報と関連づけて記録する相対位置情報記録手段と、測位情報が得られたとき、相対位置情報記録手段にすでに記録されている相対位置情報を測位情報に変換する位置情報変換手段、を有する位置情報記録装置による。
(もっと読む)
ナビゲーション装置
【課題】渋滞を回避するための経路とその所要時間を、事前に提示することができるナビゲーション装置を提供する。
【解決手段】出発時刻、出発地、および目的地をユーザが指定した通りに設定して経路探索を行い、目的地までの推奨経路と、推奨経路が通過する主要交差点ごとの通過予定時刻を取得する。これらの主要交差点を出発地とした経路探索を、出発時刻を所定時間(30分および1時間)ずつ変化させながら順に実行する。特定の主要交差点を通過しない経路が得られた場合、その主要交差点は存在しないものとして扱う。これらの経路探索の結果として、主要交差点ごとの複数の推奨経路と通過予定時刻とを含んだ情報画面40を表示する。走行中は、現在時刻に応じて推奨経路の切り替えを行う。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
401 - 420 / 3,052
[ Back to top ]