
Fターム[2F129BB21]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 方位センサ (3,052)
Fターム[2F129BB21]に分類される特許
161 - 180 / 3,052
分岐点図表示システム、端末装置、配信サーバ、分岐点図表示方法、分岐点図表示プログラム
【課題】分岐点を示す分岐点図を表示するために配信するデータのサイズを小さくし、しかも、データの配信動作を効率良く行う。
【解決手段】ナビゲーションシステム10において、配信サーバ12は、ナビゲーション装置11が特定した複数の分岐点について、これら分岐点の手前において配信すべき分岐点パーツである配信パーツを定めた配信スケジュールを作成し、そのスケジュールに従って配信パーツを配信した場合の配信負荷を演算し、配信負荷に応じて配信スケジュールを変更し、配信スケジュールに従って、配信パーツを分岐路パーツ保有部43から取得してナビゲーション装置11へ配信する。ナビゲーション装置11は、配信サーバ12が配信した分岐点パーツに基づいて、複数の分岐点それぞれに対応する分岐点図を作成して表示する。
(もっと読む)
データ配信システム、データ配信サーバ及びデータ配信方法

【課題】データのメンテナンスコストを抑えながら、車両の位置推定精度を向上させる。
【解決手段】データ配信サーバと、各々が移動体に搭載され、ネットワークを介して前記データ配信サーバに接続される複数の端末と、を備えるデータ配信システムであって、前記各端末は、位置センサ及び環境センサを備え、前記位置センサによって取得された前記移動体の位置を示す位置データ及び当該位置において前記環境センサによって取得された前記移動体の周囲の環境情報を含む環境センシングデータを前記データ配信サーバに送信し、前記データ配信サーバは、前記複数の端末から送信された環境センシングデータを保持し、前記位置データに基づいて、典型的な前記環境センシングデータを選択し、前記選択された典型的な環境センシングデータを前記端末に送信する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、および、プログラム
【課題】出発地と目的地の位置関係及び近傍ノードの位置関係を考慮して、利用される可能性のある適切な経路を探索することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、及びプログラムを提供することを課題とする。
【解決手段】本発明は、出発地から所定範囲内の出発地側ノードと目的地から所定範囲内の目的地側ノードを交通機関ネットワークから抽出し、抽出した出発地側ノードと目的地側ノードが近傍ノードであるか否かを判断し、近傍ノードと判断した出発地側ノードと出発地との間の出発地側経路及び近傍ノードと判断した目的地側ノードと目的地との間の目的地側経路を道路ネットワークを参照して探索し、探索した出発地側経路と目的地側経路及び交通機関ネットワークに基づいて経路探索ネットワークを生成し、生成した経路探索ネットワークに基づいて出発地から目的地までの経路を探索する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、および、プログラム
【課題】交通情報の更新に応じて経路を再探索した場合に、出力中の経路と再探索した経路との間で優先付けして、適切に利用者に経路を提示することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、およびプログラムを提供することを課題とする。
【解決手段】本発明において、交通網を規定するネットワーク情報を用いて探索された所定の探索条件を満たす経路が出力されている場合に、予め取得されたネットワーク情報および取得された交通情報を用いて、所定の探索条件を満たす経路を再探索し、出力中の経路と再探索された経路とを比較し、比較結果に基づいて、経路が互いに異なる区間について、優先順位を決定し、決定した優先順位に基づいて、当該優先順位の高い経路を第1の経路とし、優先順位の低い経路を第2の経路として、区別可能に出力する。
(もっと読む)
ナビゲーション装置
【課題】自車位置から離れた位置の地図画像を表示させたときに自車位置との位置関係の把握がしやすいナビゲーション装置を提供すること。
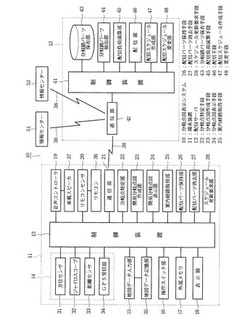
【解決手段】ナビゲーション装置は、自車位置を検出する車両位置検出部5と、自車位置周辺の地図画像を表示装置6に描画する地図描画部14、表示処理部16と、利用者によって表示装置6の周囲の所定範囲内の任意位置に移動が可能である表示端末装置7と、表示装置6に対して表示端末装置7の相対位置を検出する端末相対位置検出部42とを備える。自車位置と、端末相対位置検出部42によって検出された相対位置とに基づいて、表示端末装置7の画面に表示する地図画像の位置が決定され、この決定した位置周辺の地図画像が表示端末装置7に表示される。
(もっと読む)
車載装置とその車両方位修正方法
【課題】 本発明の目的は、簡易な方法でより正確に車両方位を特定する技術を提供することにある。
【解決手段】
搭載される車両を基準とする所定の方向を撮影可能な撮影装置を備える車載装置であって、記憶手段と、現在地と車両方位とを特定する車両状態特定手段と、前記車載装置の停止処理において、前記撮影装置を用いて前記車両の周囲を撮影した停止時映像を前記記憶手段に記憶させる停止時映像取得手段と、前記車載装置の起動処理において、前記撮影装置を用いて前記車両の周囲を撮影する起動時映像取得手段と、前記停止時映像に含まれる第一の被写体と、前記起動時映像取得手段により取得された映像に含まれる第二の被写体と、を用いて、前記車両方位を修正する車両方位変更手段と、を備えることを特徴とする。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】案内経路上の案内箇所において正しく通過したか否かを判断し、正しく通過したことをユーザに知らせることができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、出発地から目的地までの案内経路を探索し、現在位置が案内箇所手前の所定範囲に存在するか否か判定し、現在位置が所定範囲に存在すると判定された場合、方面案内情報を表示部に表示させ、現在位置が案内箇所を通過後、案内箇所から目的地への案内経路上に存在するか否か判定し、現在位置が案内箇所を通過後、案内箇所から目的地への案内経路上に存在すると判定された場合と、案内箇所から目的地への案内経路上に存在しないと判定された場合と、で異なる出力態様で方面案内情報を表示部に表示させる。
(もっと読む)
冠水路予測システム
【課題】冠水センサーのような検知手段を用いることなく、車両が進行する走行ルート上の冠水の発生を予測できる冠水路予測システムを提供する。
【解決手段】降雨時、車両のワイパーの拭き取り速度と動作時間をワイパー使用情報としてワイパー使用情報検出手段で検出する。検出されたワイパー使用情報に自車の現在位置データを付加して送受信機で送信しかつ他車からの現在位置データ付きワイパー使用情報を受信する。受信した現在位置データ付きワイパー使用情報の現在位置データから先行する他車が同一走行ルートを走行中であるかを判定手段で判定する。判定された他車のワイパー使用情報からワイパー使用情報をワイパー使用情報抽出手段で抽出し、このワイパー使用情報を基に走行ルート及びその周辺エリアの予測降雨量を降雨量算出手段で算出し、この予測降雨量を基に走行ルートに冠水が発生するか否かを冠水予測手段で予測する。
(もっと読む)
検索情報作成装置、検索情報作成方法及びプログラム
【課題】検索対象となる文字列情報を記憶するメモリ容量の増大を抑止することができる検索情報作成装置、検索情報作成方法及びプログラムを提供する。
【解決手段】検索対象となる検索語の読みの文字列を、前記検索語の読みとして利用可能な全文字種類をそれぞれ識別する全文字コードの順列にて表した第1順列部から構成された第1格納情報を作成する第1格納情報作成手段と、前記文字列を構成する文字種類を表したインデックス部と、該文字列を前記インデックス部における文字種類をそれぞれ識別する識別ビットコードの順列にて表した第2順列部とから構成された第2格納情報を作成する第2格納情報作成手段と、前記第1格納情報のデータサイズと前記第2格納情報のデータサイズとのうち、小さいデータサイズの方を前記検索語の読みの文字列として記憶する検索情報記憶手段と、を備える。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、推奨経路上の施設を通過することにより発生する歩行距離と実際の移動距離との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置が階段に到達したとき(S41:Yes)、「階段の段数×80cm−階段の長さ」を基準地点からの移動距離から減算し(S42)、推定現在位置を更新する(S43)。
(もっと読む)
画像生成システム、プログラム及び情報記憶媒体
【課題】 ユーザ情報と、道路進行方向情報とに基づき、直感に合わせてコンテンツを提示できる画像生成システム等の提供。
【解決手段】 画像生成システム100は、ユーザのウェアラブルセンサからのセンサ情報を取得するセンサ情報取得部110と、センサ情報に基づき、ユーザの位置情報と、ユーザの頭部方向情報又は視線方向情報であるユーザ方向情報とを、ユーザ情報として特定するユーザ情報特定部120と、マップ情報と、マップ情報に関連付けられたコンテンツの情報とを記憶する記憶部130と、ユーザの位置情報及びマップ情報に基づき、ユーザが位置する道路の道路進行方向を道路進行方向情報として特定する道路進行方向特定部140と、ユーザ方向情報と道路進行方向情報に基づき、提示するコンテンツを特定するコンテンツ特定部150と、特定されたコンテンツを生成する画像生成部160とを含む。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
自位置特定システム、自位置特定プログラム及び自位置特定方法
【課題】データベースに整備されていない地物に基づいて自位置が特定されることを抑制し、データベースに整備されている地物に基づいて適切に自位置を特定する。
【解決手段】推定自位置情報を取得する推定自位置情報取得部1と、撮影画像取得部3と、地物データベース21fから、画像認識の対象となる対象地物の対象地物情報を取得する地物情報取得部4と、対象地物の画像認識を行なう画像認識部6と、画像認識結果と対象地物情報とに基づいて推定自位置情報を補正する位置情報補正部9と誤認識可能性の有無を判定する誤認識可能性判定部7と、位置情報補正部9による補正の要否を判定する補正要否判定部8とを備え、補正要否判定部8は、誤認識可能性が有ると判定された場合に、位置情報補正部9による補正が不要と判定する。
(もっと読む)
停止線認識装置、停止線認識方法及びプログラム
【課題】道路ジョイント部を停止線として誤認識することを防止できると共に、停止線の認識率を向上させることが可能となる停止線認識装置を提供する。
【解決手段】自車両後方の路面の画像情報を取得する画像情報取得手段と、自車両のサスペンションの沈み込み量を検出する検出手段と、前記画像情報から画像認識により停止線及び道路ジョイント部を含む停止線候補を取得する画像認識手段と、を備え、前記画像認識手段は、前記検出手段によって検出されたサスペンションの沈み込み量に基づいて、前記停止線候補を停止線として認識することを優先する認識優先モードと前記道路ジョイント部を停止線として誤認識することを防止する誤認識防止モードとのいずれかを選択し、当該選択した認識優先モード又は誤認識防止モードによって前記停止線候補から停止線を認識する。
(もっと読む)
通信システム、案内方法及びプログラム
【課題】複数のユーザが待ち合わせる目的地まで各ユーザが到達しやすくなるような案内を行う。
【解決手段】ユーザA及びユーザBは、移動通信端末100A及び移動通信端末100Bを用いて目的地案内の設定を行うと(ステップS101,S103)、案内モードで目的地へ向かって移動する(ステップS107,S108)。ユーザAは目的地に到着すると(ステップS110)、移動通信端末100Aを他者案内支援モードに切り替える(ステップS111)。移動通信端末100Aは、移動通信端末100Bに対してポーリングを行い(ステップS112)、移動通信端末Bがポーリングを検知すると(ステップS113)、両者の間でペアリングが行われる(ステップS115)。これにより、移動通信端末100Bは、案内手段を電子コンパスに切り替える(ステップS116)。
(もっと読む)
ナビゲーション端末
【課題】特別なインフラ設備を必要とすることなく、位置が確定されている1台のナビゲーション端末とのやり取りのみで位置を確定することができるナビゲーション端末を提供する。
【解決手段】通信可能な他端末から送信された、該他端末の位置情報を含む無線波を受信する無線波受信部12と、無線波受信部12で受信された無線波に含まれる他端末の位置情報、及び他端末からの距離を示す距離情報に基づいて自端末の位置を算出する位置算出部15とを備える。これにより、特別なインフラ設備を必要とすることなく、ナビゲーション端末間のやり取りのみで位置を確定することが可能となる。
(もっと読む)
情報提供装置、情報提供方法、及びそのプログラム
【課題】現在位置に対応して所定の複数種類の対象物に関する情報を検索して表示する情報提供装置において、現在位置の測位精度に応じて最適な検索を実行する。
【解決手段】情報提供アプリケーションが起動されると、CPU11は、GPS受信機2で測定された現在位置に応じて提供可能な複数種類の対象物検索機能を表すメニュー項目(最寄り駅までのルート検索、最寄りのコンビニ検索など)を内部メモリ14から読み出し、表示装置4に表示させる。ユーザが操作装置5を用いて、所望のメニュー項目を選択すると、CPU11は、選択されたメニュー項目に対応する機能を実行する。その際、GPS受信機2で生成される測位精度情報を参照し、精度が悪い場合は検索範囲を広くする。
(もっと読む)
充電スタンド案内システム
【課題】個別に充電スタンドを割り当てることができ、割り当てた充電スタンドへ車両を案内することができる充電スタンド案内システムを提供する。
【解決手段】充電スタンド案内システム10では、充電制御部45は、車両が所定範囲内にある場合には、充電スタンド20の利用状態に基づいて充電条件を満足する充電スタンド20を選択する。また車載制御部37は、充電条件を満足する充電スタンド20の位置が目的地となるように、経路探索処理を実行する。さらに充電制御部45は、選択した充電スタンド20にて駐車場所情報を送信した車両以外の他の車両への充電を禁止するように充電スタンド20を制御する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、および、ナビゲーションプログラム
【課題】施設退出後の位置検出精度を向上可能なナビゲーション装置、ナビゲーション方法、および、ナビゲーションプログラムを提供する。
【解決手段】車両2の位置座標が補正されたと判断された場合(S109:YES)、補正後の車両2の位置座標である補正後位置座標を取得する(S113)。また、車両2の位置座標が補正されたと判断された場合(S109:YES)、車両2が施設を退出したと判断される直前に車速が0であった地点から位置座標が補正されるまでの補正前走行軌跡を取得する(S112)。そして、補正後位置座標、補正前走行軌跡、および地図情報に基づき、施設の出口地点の座標である出口座標を特定する(S112)。これにより、施設の出口座標が適切に特定されるので、施設退出時に出口座標に基づいて車両の現在位置を補正することができ、施設退出後の位置検出精度を向上することができる。
(もっと読む)
測位装置、測位システム、測位方法、プログラム
【課題】周囲環境の影響によるセンサの信頼度低下に対して高い精度で測位が行えるようにする。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
(もっと読む)
161 - 180 / 3,052
[ Back to top ]