
Fターム[2F129BB22]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830)
Fターム[2F129BB22]の下位に属するFターム
Fターム[2F129BB22]に分類される特許
1 - 20 / 5,061
情報処理装置
移動端末及び位置推定方法並びにコンピュータ読出可能記録媒体
情報表示装置及び情報提供システム
相対的ナビゲーションシステムを調節する方法
移動経路推定システム、移動経路推定装置及び移動経路推定方法
ナビゲーションシステム
画像表示装置およびナビゲーション装置
放送受信システム
レーン案内表示システム、方法およびプログラム
車両用ナビゲーション装置
ナビゲーション装置
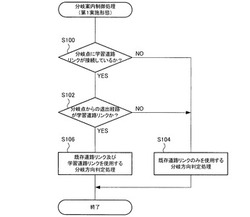
【課題】経路案内対象の分岐に学習道路が接続する場合に、学習道路の信憑性を考慮した適切な態様で進行方向案内を行う。
【解決手段】経路案内の対象となる分岐点に学習道路データにおける学習道路リンクが接続している場合(S100:YES)、当該分岐点からの退出経路が学習道路リンクに該当するか否かを判断する(S102)。分岐点からの退出経路が学習道路リンクに該当しないと判断された場合(S102:NO)、当該学習道路リンクの存在を反映せず既製地図データの既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う(S104)。一方、分岐点からの退出経路が学習道路リンクに該当すると判断された場合、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う(S106)。
(もっと読む)
ナビゲーション装置及びルート探索方法

【課題】階層構造に整備されていない地図データを用いてルート探索に要する時間を短縮するための技術を提供する。
【解決手段】出発地点を含むセルAにおいては、セルAを退出する退出地点を目的地点の位置に応じて設定し、出発地点から退出地点までのルートを探索して、探索したルートをセルAにおけるルートに設定する。その退出地点を進入地点とするセルBにおいては、進入地点が代表ルートの入口に位置しているため、その代表ルートの出口を退出地点に設定し、その代表ルートをセルBにおけるルートに設定する。そして、セルBと同様の処理をセルC〜Fにおいても行う。目的地点を含むセルGにおいては、進入地点から目的地点までのルートを探索して、探索したルートをセルGにおけるルートに設定する。
(もっと読む)
ナビゲーション装置
【課題】充電に関するより分かり易い情報を提供することができる。
【解決手段】 ナビゲーション装置は、車両の充電を行う充電スポットに関する情報を記憶する記憶部と、出発地および目的地の入力を受け付ける入力受付部と、前記入力情報を用いて経路を探索する経路探索部と、目的地が車両の充電残量から特定される到達可能範囲にない場合に充電スポットを抽出する充電スポット抽出部と、目的地に到達するために必要な前記充電スポットでの充電量を算出する充電量算出部と、探索した前記経路とともに、抽出した前記充電スポットおよび該充電スポットでの充電量を表示する表示部と、を備える。
(もっと読む)
ナビゲーションシステムおよびナビゲーション方法並びにプログラム
【課題】先行車両と自車両との距離を考慮してより適正に追従する。
【解決手段】先行車両と自車両との距離Lが予め定めた閾値Lref未満のときには、主として先行車両動作追従案内により追従案内を行ない(S160)、先行車両と自車両との距離Lが閾値Lref以上のときには目的地までの走行経路の案内と同様の手法の先行車両位置追従案内により追従案内を行なう(S170)。これにより、先行車両と自車両との距離Lが閾値Lref未満での先行車両を視認できる程度のときには先行車両の動作を迅速に確認しながら容易に先行車両を追従することができ、先行車両と自車両との距離Lが閾値Lref以上で先行車両を視認できないときでも使い慣れた案内により先行車両をより的確に追従することができる。
(もっと読む)
車両制御システム、車両制御装置、車両制御方法及びコンピュータプログラム
【課題】直近信号機が進行禁止状態であるにもかかわらず車両が誤って分岐点に進入することを防止した車両制御システム、車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点で停車している場合において、フロントカメラ19で撮像した撮像画像に基づいて、車両の進行方向前方の直近に設置された直近信号機と、車両の進行方向前方にあって車両に対して直近信号機よりも遠方に設置された奥側信号機の点灯状態をそれぞれ取得し(S3)、直近信号機の点灯状態が進行禁止状態であって、奥側信号機の点灯状態が進行禁止状態から進行許可状態に変化した場合に、奥側信号機の点灯状態が変化してから一定時間が経過するまでの間において、車両の発進を抑制する制御を行う(S8)ように構成する。
(もっと読む)
移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム
【課題】案内分岐点をユーザに対して正確に特定させることが可能となった移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラムを提供する。
【解決手段】車両の進行方向前方に案内分岐点が有る場合に、該案内分岐点や手前分岐点が信号機のカウントを誤り易い条件を満たす誤認分岐点であるか否か判定し、案内分岐点又は手前分岐点が誤認分岐点であって信号機案内を行う為の対策が有ると判定された場合には、信号機のカウントを誤り易い要因と車両から案内分岐点までの間に位置する信号機の数とを用いて該案内分岐点を特定させる『誤認対策信号機案内』を該案内分岐点の案内に設定するように構成する。
(もっと読む)
ナビゲーションシステム、地図情報更新方法およびプログラム
【課題】地図情報の更新の必要性に応じた頻度で地図情報の更新要求を行う技術の提供。
【解決手段】記録媒体に記録された地図情報の更新要求を前記地図情報の管理装置に対して出力し、前記管理装置が出力する更新情報によって前記地図情報を更新するにあたり、車両が走行した地点に関する地点関連情報を取得し、前記地点関連情報に前記地図情報の更新を示唆する変化が生じた場合に、前記地図情報の更新を示唆する変化が生じる前よりも前記更新要求が出力される頻度を増加させる。
(もっと読む)
測位装置及びプログラム
【課題】GPS情報とINS情報とを統合して測位する場合に、測位解の信頼度を精度良く計算する。
【解決手段】走行軌跡算出部20で、Mエポック分のGPS情報及びINS情報に基づいて自車両の走行軌跡を算出し、初期値算出部24で、算出した走行軌跡に基づいて、Mエポック分の自車両の位置の初期値を算出する。誤差換算・方程式導出部26で、バンドルアジャストメント方式により、初期値に基づくGPS情報の観測方程式を導出すると共に、INS誤差を、各エポックにおける自車両から見たGPS衛星の方向に投影して擬似距離誤差に換算して、GPS誤差と統合する。測位解計算部28で、観測方程式から測位解を計算すると共に、統合された観測誤差に基づいて信頼度を計算する。
(もっと読む)
慣性航法演算方法及び慣性航法演算装置
【課題】慣性航法演算によって正確性の高い位置を算出するための新しい手法の提案。
【解決手段】第1演算システム1Aにおいて、運動に係る物理量を検出するセンサーとして、加速度センサー2A及びジャイロセンサー2Bの計測結果を用いて、INS演算部20が慣性航法演算を行う。この際、代表値算出部10は、所定の時間間隔毎に到来する時刻を跨ぎ、互いに時間的に重なり合うように設定される対象期間毎に、当該対象期間内に計測された計測結果の変動に基づいて算出方法を変更して計測結果を統計演算処理する。そして、INS演算部20が、代表値算出部10による統計演算処理の結果を用いて慣性航法演算を行う。
(もっと読む)
ナビゲーション装置
【課題】車線情報を最新の状態に保つための作業量及び車線情報量を低減するとともに、走行車線を正確に求めることのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、移動体の位置を推定する位置推定手段111と、推定された移動体の位置に対応する道路リンク候補点を特定する道路リンクマップマッチング手段121と、分岐周辺の車線情報記憶手段105から道路リンク候補点の前後に存在する各対象分岐の周辺の車線情報を取得する車線情報取得手段124と、取得した車線情報を用いて各対象分岐の周辺の道路リンクの位置誤差を算出する道路リンク位置誤差算出手段125と、取得した車線情報を用いて各対象分岐の周辺の車線間距離を算出する車線間距離算出手段126と、算出した位置誤差と車線間距離を用いて各対象分岐間の車線リンクを作成する分岐間車線リンク作成手段127とを備える。
(もっと読む)
1 - 20 / 5,061
[ Back to top ]