
Fターム[2F129BB23]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830) | ヨー (469)
Fターム[2F129BB23]に分類される特許
1 - 20 / 469
空間安定化装置、空間安定化方法、及び空間安定化プログラム
移動経路推定システム、移動経路推定装置及び移動経路推定方法
位置計測装置及び位置計測システム
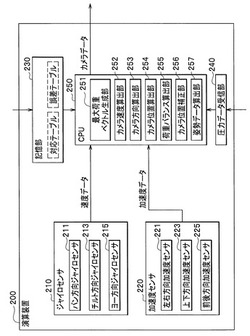
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
軌跡演算装置および軌跡演算方法

【課題】分解能が高くないセンサを用いて、健康のための体操のように所定の往復運動を含む体操の軌跡を射的法によって求めるために用いられる往路区間における終点を得る方法および装置を提供する。
【解決手段】被測定物の回転によって表される運動の前後での姿勢の変化を求める軌道演算装置であって、運動の期間中の被測定物の所定の位置の加速度および角速度を得る測定手段と、運動の期間中の前記測定手段によって得られる加速度の変化から運動の前後の被測定物の所定の位置の傾斜の角度の2次元表現を得て、測定手段によって得られる運動期間中の角速度から、運動で最も回転角の大きい主軸に直交する軸に関する回転を無視したときの回転行列を求め、傾斜の角度の2次元表現に回転行列を作用させることによって運動の前後での姿勢の変化を回転角の3次元表現として得るプロセッサと、を含む。
(もっと読む)
慣性航法演算方法及び慣性航法演算装置
【課題】ユーザーの移動状況を考慮した新たな慣性航法演算の手法の提案。
【解決手段】ユーザーの移動状況が移動状況判定部20によって判定される。そして、パラメーター値設定部40によって、INS10が実行する慣性航法演算に係る演算値に含まれる誤差を推定する所定の誤差推定処理に係るパラメーターの値が、移動状況の判定結果に基づいて設定される。そして、誤差推定処理部50により、設定されたパラメーターの値を用いて誤差推定処理が実行され、INS10により、誤差推定処理によって推定された誤差を用いて演算値が補正されて慣性航法演算が行われる。
(もっと読む)
属性対応ルート特定装置及びその方法、並びに属性対応ルートを特定するためのコンピュータプログラム及びコンピュータプログラムを記録した記録媒体
【課題】車両利用者等の属性に対応したルートを特定する装置及びその方法を提供する。
【解決手段】第1の地域と第2の地域とを繋ぐ第1のルート及び該第1のルートと異なる第2のルートを抽出し、当該第1のルート及び第2のルートの夫々につき、当該ルートを走行する車両のプローブ情報に基づいて、当該車両が特定の属性を有する対象車両であるか判定し、当該ルートを走行する全車両に占める対象車両の割合に基づき、当該対象車両が当該ルートを利用する第1の利用率及び第2の利用率を演算し、演算された第1の利用率と第2の利用率とを比較する。
(もっと読む)
姿勢角演算装置、姿勢角演算方法、及びプログラム
【課題】高速で姿勢角度を算出すること。
【解決手段】姿勢角演算装置は、移動体の状態量を検出する状態検出手段と、状態検出手段により検出された移動体の状態量に基づいて、移動体の姿勢を示す四元数を算出する四元数算出手段と、四元数算出手段により算出された四元数におけるヨー軸成分をキャンセルして四元数の修正を行った修正四元数(Qmod=w+xi+yj+zk)を算出する修正手段と、修正手段により算出された修正四元数に基づいて、近似式を用いて移動体のロール角α及びピッチ角βを高速に算出する姿勢角計算手段と、を備えている。
(もっと読む)
ナビゲーション装置
【課題】装置構成が複雑化したり、装置構成に要する費用が嵩むことを防止しつつ、信号機の位置を精度良く検出する。
【解決手段】ナビゲーション装置10は、車両の加速度の周波数分析から周波数に対応するパワースペクトルを算出する周波数分析部26と、パワースペクトルに基づき渋滞予兆度を算出する渋滞予測部29と、地図データ記憶部11に記憶された信号機の位置情報および現在位置検出部23により取得された車両の現在位置に基づき、信号機が現在位置から所定範囲内に存在するか否かを判定する位置判定部24と、を備える。渋滞予測部29は、予め渋滞予兆度の大小と現在位置から信号機までの距離の長短との相関を示すデータを記憶し、信号機が現在位置から所定範囲内に存在する場合に、渋滞予兆度に応じて現在位置から信号機までの距離を推定する。
(もっと読む)
状態推定装置
【課題】非線形カルマンフィルタを用いて高速且つ正確な状態推定を行う。
【解決手段】携帯機器1は、3次元地磁気センサ70、3次元加速度センサ80、CPU10、状態推定プログラム100を備え、状態推定プログラム100は、複数の磁気データq1〜qNの示す座標を近傍に有する球面の中心点cSの座標を算出する中心点算出モジュール300と、複数の加速度データa1〜aMに基づいて、携帯機器の動きが安定しているか否かを判定する安定性判定モジュール400と、安定性判定モジュール400が行う判定結果が肯定である場合に初期ベクトルINIを算出する初期ベクトル生成モジュール500と、初期ベクトルINIを初期値とする状態ベクトルxを観測値ベクトルyを用いて更新するカルマンフィルタモジュール600とを備える。
(もっと読む)
評価表示システム、方法およびプログラム
【課題】ハイブリッド車両の運転者が自信の運転技術を向上させるための情報を案内する技術の提供。
【解決手段】表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得し、前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得し、前記地図上に前記単位区間毎の前記今回評価と前記過去評価とを併せて表示するとともに、EV走行とHV走行時の燃費の評価とを区別して表示する。
(もっと読む)
状態推定装置
【課題】高速且つ処理負荷の小さな非線形カルマンフィルタの演算を実現する。
【解決手段】状態推定装置は、3次元磁気センサ70を含む複数のセンサと、システムの状態を表す複数の状態変数を要素とする状態ベクトルxk及び複数のセンサからの出力値を要素とする観測値ベクトルykを用いて状態ベクトルxkを更新することによりシステムの状態を推定する複数のカルマンフィルタKFと、互いに異なる複数の初期ベクトルINIを生成し、状態ベクトルxkの初期値として複数のカルマンフィルタKFの各々に供給する初期値生成部200と、複数のカルマンフィルタKFの推定精度を各々評価することで、推定精度が最も高いカルマンフィルタを特定し、特定したカルマンフィルタKFを除く他のカルマンフィルタKFの動作を停止させるカルマンフィルタ制御部400とを備える。
(もっと読む)
追従走行制御装置及び追従走行制御システム
【課題】車車間通信で得られる情報を用いて追従走行制御を行うものにおいて、追従対象の車両との車間距離を十分に小さくすることを可能にする。
【解決手段】車車間通信によって周辺車両の情報を取得するとともに、追従対象車から車車間通信によって取得した情報を用いて、当該追従対象車に対して追従走行制御を行う。また、同一進行方向の車線が複数存在する道路に自車及び追従対象車が位置する場合に、自車と同一進行方向且つ別車線に位置する追従対象車に対して、当該追従対象車と同一進行方向且つ別車線を走行しながらも追従走行制御を行う。
(もっと読む)
状態推定装置、オフセット更新方法およびオフセット更新プログラム
【課題】カルマンフィルタを用いて地磁気センサの正確なオフセット値を推定する
【解決手段】携帯機器1は、3次元地磁気センサ70、3次元加速度センサ80、3次元角速度センサ90、カルマンフィルタ演算部120及び初期値生成部140を備える状態推定部100、中心点導出部200、及び内部磁界Biを発生させる部品を備える。中心点導出部200は、3次元地磁気センサ70から順次出力される複数の磁気データqiで示される座標が内部磁界Biの成分を示す座標を中心点とする第1球面Sの近傍に確率的に分布すると仮定して、第1球面Sの中心点cOを算出する。カルマンフィルタ演算部120は、3次元地磁気センサ70のオフセットqOFFを推定する状態変数qOを含む複数の状態変数を要素とする状態ベクトルxkを更新し、中心点導出部200が中心点cOを算出した場合には、状態変数qOを中心点cOによって上書きする。
(もっと読む)
カルマンフィルタ、状態推定装置、カルマンフィルタの制御方法、及びカルマンフィルタの制御プログラム
【課題】カルマンフィルタの計算量を低減する
【解決手段】カルマンフィルタKFは、姿勢q+k−1及びベクトルβ+k−1を要素とする状態ベクトルx+k−1を、状態遷移モデルに適用して、姿勢q−k及びベクトルβ−kを要素とする状態ベクトルx−kを算出する推定状態ベクトル算出部140と、状態ベクトルx−kの推定誤差の共分散P−kを算出する共分散算出部125とを備える。推定状態ベクトル算出部は、ベクトルβ−kをベクトルβ+k−1と等しい値に設定し、共分散算出部125は、共分散P−kのうち、ベクトルβ−kの推定誤差の共分散を表す成分P−ββ,kを、状態ベクトルx+k−1の推定誤差の共分散P+k−1のうち、ベクトルβ+k−1の推定誤差の共分散を表す成分P+ββ,k−1、及び、状態遷移モデルのプロセスノイズの共分散(Qk)のうち、ベクトルβ+k−1のプロセスノイズの共分散を表す成分Qββの和として算出する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの身体の動きに応じた第1の値を取得する取得部と、上記第1の値、及び上記ユーザの歩幅又は歩行速度を示す第2の値の間の関係を示す関数を仮定し、上記第1の値及び上記絶対位置に基づいて上記関数に含まれる係数を算出することにより上記関数を特定する関数特定部と、上記関数を用いて、上記第1の値に対応する上記第2の値を算出する算出部と、算出される上記第2の値を用いて、上記ユーザの歩行テンポと上記第2の値との対応関係を学習する学習部と、を有する。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、およびナビゲーションシステムの動作方法
【課題】後続車両においてユーザーに伝える情報の精度を向上させることが可能な技術を提供する。
【解決手段】ナビゲーションシステムは、車線を走行する情報提供車両ANの走行履歴情報TRKNに基づいて第1渋滞開始地点(第1渋滞終了地点)を検出可能であり、情報提供車両ANのあとを走行する情報提供車両AN+1の走行履歴情報TRKN+1に基づいて第2渋滞開始地点(第2渋滞終了地点)を検出可能な渋滞地点検出部と、第1渋滞開始地点と第2渋滞開始地点とを用いて渋滞開始地点の変化量を算出し、当該変化量に基づいて、第2渋滞開始地点よりも時間的に後の渋滞開始地点を予測した予測渋滞開始地点を取得する渋滞状況予測部と、情報提供車両AN+1の後続車両において、予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行う情報提供手段とを備える。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】登山時のユーザの体調を高度に基づいて判定することのできる、新規かつ改良された情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、高度情報を取得する高度情報取得部151と、前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部159とを有する。
(もっと読む)
衛星測位データおよび車両センサデータに基づく車両ナビゲーション
【課題】車両ナビゲーションの方法の提供。
【解決手段】車両ナビゲーションの方法であって、車両の衛星測位装置から衛星測位データを取得することと、車両センサから車両センサデータを取得することと、カルマンフィルタによって衛星測位データおよび車両センサデータを結合し、車両の結合された状態ベクトル推定値を取得することとを含み、カルマンフィルタが、衛星測位データを受信し車両の第1の状態ベクトル推定値および対応する第1の状態誤差共分散行列を生成する第1のフィルタと、車両センサデータを受信し車両の第2の状態ベクトル推定値および対応する第2の状態誤差共分散行列を生成する第2のフィルタと、第1の状態ベクトル推定値と第1の状態誤差共分散行列と第2の状態ベクトル推定値と第2の状態誤差共分散行列とを受信し、結合された状態ベクトル推定値および対応する結合された状態誤差共分散行列を生成する第3のフィルタとを備える、方法。
(もっと読む)
携帯型電子デバイスのための、磁場センサおよび加速度計を使用して姿勢および角速度を検知するシステムおよび方法
【課題】動的な物体の姿勢および角速度を含んだ動き情報を決定するシステムである。
【解決手段】3つの略直交する方向における磁場の強度および/または方向を、本体基準座標系において測定するための磁場検知デバイス71と、物体の全加速度を本体基準座標系において測定するために適合されている加速度検知デバイス72と、フィルタにおいて、全加速度の測定データおよび磁場の測定データと運動力学的モデルとを組み合わせることによって、姿勢および角速度を算出するために適合されているプロセッサ75とを備えている。
(もっと読む)
ナビゲーション装置、及びナビゲーション方法
【課題】過去に走行した道路を逆方向に走行する際に、走行する道路の方向を判断し易くするための情報を提供する。
【解決手段】自車両の進行方向後方を撮像した後方映像を、後方映像を撮像したときの車両位置情報と対応付けて提示データとして記憶部に格納する。そして、本発明の一態様は、その格納した提示データに基づき、上記提示データの車両位置に自車両が達するタイミングに合わせて、当該車両位置に対応する提示データ中の後方映像を車両の乗員に提示する。
(もっと読む)
1 - 20 / 469
[ Back to top ]