
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
21 - 40 / 322
建物内の地図提示システム
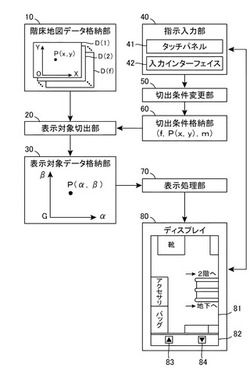
【課題】表示対象となる階を切り替えても、切替前後における空間的な位置関係を容易に把握させる。
【解決手段】階床地図データ格納部10には、各階の階床地図データが格納されている。表示対象切出部20は、切出条件格納部60内に格納されている切出条件に基づいて、f階の階床地図データD(f)から、基準点P(x,y)の位置周辺の地図を倍率mで表示するための表示対象データを切り出し、これを表示対象データ格納部30に格納する。表示処理部70は、この表示対象データに基づいて、ディスプレイ80上に地図を表示する。切出条件変更部50は、指示入力部40から与えられるユーザの指示に基づき、切出条件を変更する。階数変更指示が与えられた場合、階数fのみを変更し、基準点P(x,y)および倍率mを維持することにより、真上もしくは真下の位置の周辺地図が同じ倍率で表示されるようにする。
(もっと読む)
除雪支援システム及び除雪車

【課題】 無積雪時の実写映像に基づき障害物等の構造物と除雪車との位置関係を目視上及び座標計算上で正確に把握することによって、容易に且つ安全に除雪作業を行うことができる除雪支援システムの提供。
【解決手段】 無積雪時に撮像手段1aで同時取得した全方位の実写映像を、映像取得時の車両Aの絶対座標系における車両座標及び移動方向等と結び付けて記録する映像記録手段1と、車両座標、並びに所望の視線から導かれる移動方向等に対応する実写映像を前記映像記録手段1から読み出し表示フレームFに出力する映像出力手段4と、映像記録手段1から読み出した実写映像に含まれる特徴点の絶対座標を当該映像記録手段1から読み出し絶対座標系の三次元モデルを作成する構造物記録手段5を備える除雪支援システム。
(もっと読む)
移動方法特定システム、移動方法特定方法および移動方法特定プログラム
【課題】同一の道路を四輪車が通行可能な場合でも移動方法が二輪車であることを精度よく特定する。
【解決手段】端末の傾きを取得する傾き取得手段と、前記傾きの変化量が所定の閾値よりも大きいか否かを判定する判定手段と、前記傾きの変化量が前記閾値よりも大きい場合、前記端末の移動方法が二輪車であると特定する移動方法特定手段と、を備える移動方法特定システム。
(もっと読む)
携帯型電子デバイスのための、磁場センサおよび加速度計を使用して姿勢および角速度を検知するシステムおよび方法
【課題】動的な物体の姿勢および角速度を含んだ動き情報を決定するシステムである。
【解決手段】3つの略直交する方向における磁場の強度および/または方向を、本体基準座標系において測定するための磁場検知デバイス71と、物体の全加速度を本体基準座標系において測定するために適合されている加速度検知デバイス72と、フィルタにおいて、全加速度の測定データおよび磁場の測定データと運動力学的モデルとを組み合わせることによって、姿勢および角速度を算出するために適合されているプロセッサ75とを備えている。
(もっと読む)
経路探索装置、経路探索方法、及びプログラム
【課題】容易な操作で計測を開始したスタート地点まで戻る復路経路を探索することができる経路探索装置、経路探索方法、及びプログラムを提供する。
【解決手段】経路探索装置は、走行距離または走行時間を計測する計測部と、現在地の位置情報を取得する位置情報取得部と、上記計測部が計測を開始した時点において上記位置情報取得部により取得された上記位置情報をスタート地点の位置情報として登録するスタート地点登録部と、上記スタート地点に戻るための操作を検知すると、上記操作を検知した時点における上記現在地を出発地とし上記スタート地点を目的地とする復路経路を探索する経路探索部と、を有する。
(もっと読む)
経路比較装置、経路比較方法、及びプログラム
【課題】経路情報のデータ構造や格納方式が異なる場合であっても、経路同士を比較して一致度合いを算出することができる経路比較装置、経路比較方法、及びプログラムを提供する。
【解決手段】経路比較装置は、スタート地点及びゴール地点の位置情報を取得する地点情報取得部と、上記スタート地点及び上記ゴール地点間のリファレンス経路の形状データを取得するリファレンス経路取得部と、上記スタート地点及び上記ゴール地点間の経路を探索する経路探索部と、上記経路探索部により探索された探索経路の形状データと、上記リファレンス経路の形状データとを比較することにより上記経路間の一致度合いを示すマッチング度を算出するマッチング度算出部と、を有する。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】トンネルや高架下でレーダー探知機がGPS衛星からの電波を受信できなくなった場合には、三軸加速度センサの出力(検出値)を取得する(S31)。次いで、三軸加速度センサの出力(検出値)の振幅を一定時間平均化する(S32)。現在が停止状態(0km)で、S32で平均化した値が、0.017G以上であれば(S34:YES)、現在は移動状態であると判定する(S34)。また、現在が移動状態で、S32で平均化した値が、0.009G以下が3秒以上継続した場合は(S33:NO,S35:YES)、現在は停止状態であると判定する(S36)。
(もっと読む)
角速度検出方法及びその装置
【課題】角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出装置を提供すること。
【解決手段】第1補正部102は、3軸磁気信号α1及び3軸加速度信号β1が入力されて第1補正磁気信号α2及び第1補正加速度信号β2を出力する。第2補正部103は、第1補正磁気信号α2及び第1補正加速度信号β2が入力されて第2補正磁気信号α3及び第2補正加速度信号β3を出力する。回転軸情報演算部104は、第2補正磁気信号α3及び第2補正加速度信号β3が入力されて回転軸情報cを出力する。回転量情報演算部105は、回転軸情報cと第1補正磁気信号α2とが入力されて回転量情報dを出力する。角速度ベクトル情報演算部106は、回転軸情報cと回転量情報dとが入力されて角速度ベクトル情報eを出力する。
(もっと読む)
速度検出装置及び方法
【課題】移動体の速度を自律航法手段により高精度に検出することのできる速度検出装置及び方法を提供する。
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
(もっと読む)
電子書籍閲覧装置、コンピュータプログラム
【課題】リアルな書籍の読書時と同等な感覚を得られるGUIを備えるとともに、乗り物に乗って移動中にはその状況に応じた動作・機能を備えた電子書籍閲覧装置を提供する。
【解決手段】制御部、表示部、対話型入力部、記憶部、位置情報取得部、傾き検出部、を備えた電子書籍閲覧装置であって、利用者が乗車移動中かどうかを判定する乗車移動判定機能と、乗車移動判定機能の判定結果を次回の判定結果により上書きされるまで記憶する記憶領域と、電子書籍コンテンツが選択されて閲覧状態の時に電子書籍閲覧装置の向きが変化したことが検知されると所定の読書進行状況表示画面を表示する進行状況表示機能と、を備え、乗車移動判定結果が乗車移動中の時は、進行状況表示機能を無効化または抑制するように制御する。
(もっと読む)
進行方位算出装置、進行方位算出方法及び進行方位算出プログラム並びにナビゲーション装置
【課題】進行方位を精度良く算出できるようにする。
【解決手段】本開示の進行方位算出装置は、使用者の歩行に伴い発生する加速度のうち、鉛直方向の加速度を表す鉛直加速度と、水平面内における加速度の方位及び大きさを表す水平加速度とを検出する検出部と、鉛直加速度のゼロクロス点を基に、使用者の2歩に相当する期間を歩行周期として設定する歩行周期設定部と、歩行周期内において、水平加速度の大きさが極小となる位相を基に、使用者の進行方向への加速と減速とが切り替わる加減速切替位相を設定する加減速切替位相設定部と、加減速切替位相毎に区切られた各区間を交互に加速区間又は減速区間として推定する加減速区間推定部と、減速区間では水平加速度が表す方位に基づき、加速区間では水平加速度が表す方位と反対の方位に基づき、使用者の進行方位を決定する進行方位決定部とを設けるようにした。
(もっと読む)
情報処理装置、携帯端末、注意喚起システム、注意喚起方法およびプログラム
【課題】ユーザが不注意な状態になっていることを気付かせることが可能な情報処理装置、携帯端末、注意喚起システム、注意喚起方法およびプログラムを提供する。
【解決手段】情報処理装置は、携帯端末から、携帯端末の位置を表す位置情報と、携帯端末の加速度を表す加速度情報と、を受信する受信手段と、位置情報と加速度情報とに基づいて携帯端末のユーザが注意を必要とする所定状況にあるかを判別し、ユーザが所定状況にある場合に、携帯端末にユーザの注意を喚起する旨の通知情報を送信する制御手段と、を含む。
(もっと読む)
携帯型ナビゲーション装置
【課題】 携帯型ナビゲーション装置において、横道に逸れた場合の経路を事前に簡便に探索する技術を提供する。
【解決手段】 歩行者が通る通路網を表す通路ネットワークを用いて、経路探索、案内を行う機能を携帯端末10に備える。携帯端末10には、その動きによって方位を検出できる機能を備えておく。ユーザが現在位置で、特定の方向に向けて携帯端末10を振るなどして方位を指定すると、指定された方位に存在するリンクを検出し、そのリンクを経由して目的地に向かう新経路1〜3が探索される。探索された新経路1〜3についての道のりや所要時間などの情報は、案内中の案内経路の情報と対比する形でユーザに提供される。
こうすることにより、ユーザは、案内途中に気になる通りを見つけた場合など、その通りに進む前に目的地までの経路情報を知ることができ、無用な大回りなどを回避することができる。
(もっと読む)
データ配信システム、データ配信サーバ及びデータ配信方法
【課題】データのメンテナンスコストを抑えながら、車両の位置推定精度を向上させる。
【解決手段】データ配信サーバと、各々が移動体に搭載され、ネットワークを介して前記データ配信サーバに接続される複数の端末と、を備えるデータ配信システムであって、前記各端末は、位置センサ及び環境センサを備え、前記位置センサによって取得された前記移動体の位置を示す位置データ及び当該位置において前記環境センサによって取得された前記移動体の周囲の環境情報を含む環境センシングデータを前記データ配信サーバに送信し、前記データ配信サーバは、前記複数の端末から送信された環境センシングデータを保持し、前記位置データに基づいて、典型的な前記環境センシングデータを選択し、前記選択された典型的な環境センシングデータを前記端末に送信する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】GPSユニット3とINSユニット5とを備えた位置算出装置1において、影響度合設定部7は、位置算出を開始してから所与の条件が成立するまでの間は、GPS計測結果のINS計測結果に対する影響度合を第1の度合に設定し、所与の条件が成立した後は、影響度合を第1の度合よりも低い第2の度合に設定する。そして、カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
キャリブレーション方法、情報処理装置及びキャリブレーションプログラム
【課題】ジャイロの零点オフセットを簡易にキャリブレーションすることを課題とする。
【解決手段】サーバ装置30は、移動体端末10が第1の地点から位置または角度の誤差が特定量となる第2の地点へ移動した場合に、モーションセンサ11の出力を用いたデッドレコニングにより第2の地点で得られる位置または角度と特定量との差分を特定する。さらに、サーバ装置30は、特定結果として得られた差分から、当該移動体が静止状態である場合にジャイロ11bによって出力されるセンサ値である零点オフセットを算出する。
(もっと読む)
車外映像表示システム
【課題】運転操作によりどのように車両が挙動するのか、直感的に分かりづらいという困難点を解消することができる車外映像表示システムを提供することを目的とする。
【解決手段】車両とスマートフォンとからなるシステムであって、スマートフォンは、スマートフォン自身の姿勢を検出する端末姿勢検出手段と、情報を画面に表示する表示手段を持ち、車両は、車両自身の姿勢を検出する車両姿勢検出手段と、車外映像を撮影する車外映像撮影手段と、端末姿勢検出手段が検出した端末姿勢の変化量から前記表示手段に表示するべき車外映像の表示パラメータを決定する表示パラメータ決定手段と、車外映像撮影手段が撮影した映像を表示パラメータ決定手段が決定したパラメータにもとづいて合成する画像合成手段を備えることを特徴とする。
(もっと読む)
位置測定システム、位置測定装置および位置測定プログラム
【課題】受信可能なTDOA測定が4つよりも少ない状態において、十分に良好な位置推定ができる位置測定システム、位置測定装置および位置測定プログラムを提供する。
【解決手段】3つ以上のランドマーク装置と、前記ランドマーク装置から送信される情報であって該ランドマーク装置の位置を示す位置情報を有する信号を受信する移動端末とを有する位置測定システムであって、前記移動端末は、該移動端末に内蔵されたセンサであって、該移動端末の移動運動を検出するセンサと、前記3つ以上のランドマーク装置のそれぞれから受信した前記位置情報と、前記センサの検出値とに基づいて、該移動端末の位置を算出する位置推定手段とを有する。
(もっと読む)
携帯電子機器および移動経路記録方法
【課題】地図情報を利用することなく移動経路を記録すること。
【解決手段】携帯電話端末(携帯電子機器)1は、位置情報に対応付けられた仮想オブジェクトを他の携帯電子機器における撮影画像に重ねて表示させるサーバ装置と通信する。携帯電話端末1は、位置を検出する位置・姿勢検出部36と、位置・姿勢検出部36によって検出された位置が変化すると、当該変化した位置に基づく指標情報を生成する指標情報生成部と、当該生成された指標情報を、前記サーバ装置へ前記位置情報として送信する制御部22とを備える。
(もっと読む)
移動端末及び移動経路算出プログラム
【課題】移動経路の算出精度を維持しつつ、消費電力を低減する。
【解決手段】絶対位置検出部30が移動端末100の絶対位置を検出した結果と、リンク情報生成部22が移動端末の直進距離を示す線分(リンク)を生成した結果と、に基づいて、移動経路算出部24が移動経路を算出する。この場合に、移動経路算出部は、移動経路を算出する際に、リンク情報生成部22が取得したリンクの長さを補正するための補正パラメータr1、r2、r3、…、と、リンクの方向(角度t1、t2、t3、…)とを絶対位置検出部30が検出した絶対位置と、絶対位置を検出したときに移動端末が移動していたリンク上の点との距離に基づいて算出する。
(もっと読む)
21 - 40 / 322
[ Back to top ]