
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
61 - 80 / 322
位置情報提供装置、位置情報提供方法、位置情報提供システム、及びプログラム
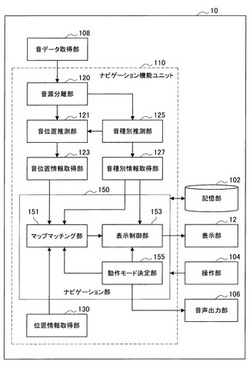
【課題】地図上における音の発信位置を提供する。
【解決手段】位置情報提供装置10は、音データの発信位置を示す音位置情報を取得する音位置情報取得部123と、上記音データの発信位置を示すアイコンを地図上に重畳した地図表示画面の表示を制御する表示制御部153とを有する。
(もっと読む)
地点履歴表示装置、地点履歴表示システム、サーバ装置、端末装置、地点履歴表示方法、および、プログラム

【課題】利用者が目的地などの地点履歴を思い出し易いように表示することができる、地点履歴表示装置、地点履歴表示システム、サーバ装置、端末装置、地点履歴表示方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、地点の登録時の日付情報を含む地点履歴情報を取得し、取得した地点履歴情報に基づいて、日付情報に対応するカレンダーの日付位置に、地点の登録履歴があることを示す履歴情報を対応付けて一覧にした、履歴一覧情報を生成し、生成した履歴一覧情報を表示部に表示させる。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 車両移動を含む移動経路の軌跡の取得精度を向上させることができて、且つ、消費電力量を抑えることのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段(15)と、方位及びユーザの動きを計測する計測手段(16、17)と、計測手段の計測結果に基づき、ユーザの移動種別又は停止の判定を行う判定手段(21)、及び、ユーザの移動方向を特定する特定手段(22)と、車両による平均移動速度を算出する移動速度算出手段(10)と、車両による移動中に、特定手段で特定された移動方向へのこの平均移動速度での移動距離を、絶対位置測定手段により求められた基準位置情報に積算することにより移動位置を求める位置算出手段(10)と、を備える。
(もっと読む)
測位装置、測位方法、および、プログラム
【課題】 測定精度の高い位置データおよび軌跡データを取得することのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段と、移動方向及び移動量を計測する移動計測手段と、移動計測手段により計測された移動情報を当該移動の始点の位置情報に積算していくことで現在位置を算出する自律測位手段と、絶対位置測定手段により求められた現在位置の精度指標と自律測位手段により求められた現在位置の精度指標とを比較して、より高精度な現在位置データを選択する位置選択手段とを備え、絶対位置測定手段により求められた現在位置データが位置選択手段によって選択された場合には、選択された現在位置を基準点として設定し、自律測位手段により求められた現在位置の精度指標は、基準点から累積的に精度が低下するように設定される。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 電車による移動を含む移動経路の軌跡を精度良く取得することのできる低消費電力の測位装置、測位方法、プログラムを提供する。
【解決手段】
現在位置を測定する絶対位置測定手段(15)と、絶対位置測定手段の動作タイミングを制御して非連続的に現在位置を測定させる測位制御手段(10)と、動作の計測を行う移動計測手段(15、16)と、移動計測手段の計測結果に基づいて動作種別の判定を行う動作内容判別手段(21)と、鉄道路線図の情報を記憶する地図データ記憶手段(13a)と、絶対位置測定手段により測定された位置情報、及び、鉄道路線図の情報に基づいて、動作内容判別手段により列車移動状態であると判定された期間の移動経路を判別する移動経路判別手段(10)と、を備える。
(もっと読む)
加速度データ補正装置、及び、ナビゲーション装置
【課題】加速度センサとスピーカとが同一の筐体に内蔵されている装置において、加速度センサ出力からスピーカの振動の影響を除去すること。
【解決手段】筐体100に内蔵スピーカ132と加速度センサ124とが備え付けられた電子装置(カーナビゲーション装置)10は内蔵スピーカ132の振動が加速度センサ124の出力に及ぼす影響を除去する加速度データ補正部140を備え、加速度データ補正部140は、制御手段110と、内蔵スピーカ132に供給される音声信号をフーリエ変換する音声信号処理部141と、加速度センサ124の出力をフーリエ変換する加速度信号処理部142と、内蔵スピーカ132から音声信号が出力される場合に、ともにフーリエ変換された加速度センサの出力から音声信号の影響分を減じた後に逆フーリエ変換を行う信号合成部143と、を備える。
(もっと読む)
緊急避難モード付ナビゲーションシステム
【課題】車を運転している時に近くに大規模災害が発生し、緊急避難を行う時に、車のキーを差したまま、またドアロックをせずに避難する際、その後救急隊員等がその車を他の場所に移動した時にその位置等の情報等をドライバーに知らせることができるようにした「緊急避難モード付ナビゲーションシステム」とする。
【解決手段】災害情報を受信して近くに大きな災害が発生したことを検出することにより自動的に、或いは手動によって緊急避難モードの作動を開始した後、キーを挿入したままドアロックせずにドライバーが避難すると、その後エンジンの始動を検出した時には、車両の現在位置、及び移動軌跡を予め登録した携帯電話に送信する。その際には、衝撃センサによる車両の損傷情報、燃料残量、更には車内撮影カメラを搭載している時にはその画像を送信しても良い。
(もっと読む)
情報検索端末、情報検索システム及び検索エリア設定方法
【課題】位置に対応付けられた情報の検索において、検索範囲の設定を容易にすると共に、方位が考慮された有用な情報の提供を可能とする。
【解決手段】情報検索端末1では、端末方位及び加速度の変化にもとづき、情報検索端末1がユーザにより動かされた際の端末アクションが判別され、端末位置を基準とした端末方位に基づき検索エリアが設定される。これにより、ユーザが情報検索端末1を振るような動作を行うことにより、端末方位の方向に位置する一定の地理的な領域を検索エリアに設定できる。従って、検索エリアを容易に設定できる。また、端末位置を基準とした端末方位に基づき検索エリアが設定されるので、方位が考慮された有用な情報の提供が可能となる。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】利用者に端末の姿勢が大凡一定となるように所持された携帯端末について、その携帯端末に搭載された加速度センサ及び地磁気センサを用いて、できる限り少ない演算量で歩行者の進行方向を決定する携帯端末等を提供する。
【解決手段】進行方向決定手段は、鉛直方向加速度算出手段と、歩行タイミング検出手段と、歩行タイミングに基づいて、指定歩数分の加速度データを取得する指定歩数分加速度取得手段と、指定歩数分の加速度データから、歩行者の歩行動作によって生じる加速度面を推定する加速度面推定手段と、加速度面及び鉛直方向加速度から、当該加速度面における法線ベクトルと、前後方向加速度とを算出する前後方向加速度算出手段と、法線ベクトルにおける右向き単位ベクトルと、重力ベクトルGと、地磁気ベクトルMとを用いて、進行方向を算出する進行方向算出手段とを有する。
(もっと読む)
車両状態記録装置
【課題】明らかな異常でないが、ユーザが違和感が感じた場合に、運転者の操作がなくても、車両状態情報を記憶可能な車両状態記録装置を提供すること。
【解決手段】車両の位置情報を取得する位置情報取得手段11と、車両挙動を示す車両挙動情報を取得する車両挙動情報取得手段15と、位置情報と該位置における標準的な車両挙動情報を関連づけて記憶する標準車両挙動情報記憶手段16と、現在の位置情報に対応づけて標準車両挙動情報記憶手段16に記憶された標準的な車両挙動情報に対し、現在の車両挙動情報が異なっているか否かを判定する判定手段23と、標準的な車両挙動情報と現在の車両挙動情報が異なっていると判定された場合、車両の状態情報を記録する記録手段24と、を有する車両状態記録装置100を提供する。
(もっと読む)
加速度算出方法、位置算出方法及び加速度算出装置
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
位置検出装置、方法及びプログラム
【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
移動状態判別装置、移動状態判別方法およびプログラム
【課題】 利用者の移動状態の判別、特に、レールに沿って走る乗物で移動している状態と、道路上を走る乗物で移動している状態との判別を行うことのできる移動状態判別装置、移動状態判別方法およびプログラムを提供する。
【解決手段】 加速度センサの出力から進行方向に対して横方向の成分で且つ所定の周波数成分(1〜3Hz)の加速度を抽出し、この成分の大きさが第2閾値より大きくなければレールに沿って走る乗物により移動している状態と判定し、第2閾値より大きければ道路上を走る乗物により移動している状態と判定する。
(もっと読む)
慣性センサ,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法
【課題】軽量,小型および安価であって、低精度なセンサ群とカルマンフィルタを組み合わせることにより姿勢情報の計算にあたって四元数を用い、センサの観測値から計算する修正量も四元数とすることにより高精度で移動体の姿勢誤差を推定し、十分な精度で移動体の姿勢を推定することができるジャイロ,加速度計,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法を提供する。
【解決手段】航空機にジャイロ装置11,加速度計12,磁気センサ14および速度計13を搭載する。演算器15,カルマンフィルタ19でこれらセンサに基づいた演算を行い、航空機の姿勢情報を計算する。姿勢情報の計算には四元数を用い、観測値から計算する修正量も四元数とすることにより、これを計算値に乗じることにより正確な姿勢を推定する姿勢推定装置を実現する。
(もっと読む)
姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラム
【課題】3次元の姿勢角を求めるための計算を効率よく行うことができ、演算時間を短縮でき、かつ演算速度を向上することができる姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラムを提供する。
【解決手段】姿勢制御装置は、状態フィードバックを用いて移動体の姿勢の推定を行う。この姿勢制御装置は、姿勢及び姿勢変化率が入力され、これらを四元数に変換する入力部101と、四元数に変換された姿勢及び姿勢変化率を使用してフィルタ演算するフィルタ演算部102と、フィルタ演算により得られた姿勢に基づき移動体の姿勢制御を行う姿勢制御部104とを有し、フィルタ演算部102は、姿勢の推定を行うためのフィルタ演算に球面線形補間を使用する。
(もっと読む)
リンク情報生成装置及びリンク情報生成プログラム
【課題】消費電力を低減しつつ、ユーザの直進距離の情報を含むリンク情報を高精度に算出する。
【解決手段】判定部34が、加速度情報検出部50により歩行が検知されている間に、地磁気情報検出部40により取得される地磁気の変化量に基づいて、ユーザの歩行状態を判定し、リンク情報算出部36は、加速度情報検出部50による検出結果と、判定部34による判定結果と、に基づいて、ユーザの直進距離の情報を含むリンク情報を算出する。
(もっと読む)
校正データ取得方法、加速度センサー出力補正方法及び校正データ取得システム
【課題】ミスアライメント誤差を考慮しつつ、慣性センサーの温度特性を適切に求めるための新たな手法を提案すること。
【解決手段】試験システム1において、加速度センサー520を具備するセンサーモジュール5の特性判定処理が行われる。すなわち、試験装置3において、絶対軸が定められた被検体固定装置340に、加速度センサー520の検出軸の方向を絶対軸方向とするようにセンサーモジュール5が固定される。そして、センサーモジュール5の姿勢及び恒温槽320内部の温度を変化させながら、加速度センサー520の出力値を記録するデータ取得処理が行われる。そして、記録された加速度センサー520の出力値を用いて、補正係数算出装置2により温度依存成分の温度係数及びミスアライメント係数が補正係数として算出される。
(もっと読む)
ナビゲーション装置
【課題】道路傾斜による影響を排除し取付角度を正確に求めることができるナビゲーション装置を提供することを目的とする。
【解決手段】車両に取付をした取付台に任意の角度で設置することができるナビゲーション装置1であって、互いに直交する3つの軸の各方向の加速度を検出する3軸加速度センサ4と、ナビゲーション装置1の取付角度を算出する制御部2とを備え、制御部2は、3軸加速度センサ4が車両走行中に検出した加速度の2つの軸についてそれぞれの方向の加速度である第1および第2加速度を取得し、この第1および第2加速度の絶対値の比率および加速度の極性により取付角度を算出する。
(もっと読む)
車両走行制御システム
【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
(もっと読む)
61 - 80 / 322
[ Back to top ]