
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
81 - 100 / 322
電子機器、電子機器の方向提示方法、プログラムおよび電子機器の方向提示システム
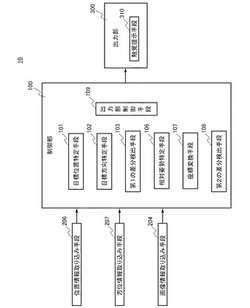
【課題】 通話中に、例えば、目的の場所や人物、通話相手の方向を、触覚によってリアルタイムで提示することのできる電子機器、電子機器の方向提示方法、プログラムおよび電子機器の方向提示システムを提供する。
【解決手段】 位置情報取り込み手段、方位情報取り込み手段、および、ユーザの顔の少なくとも一部の画像情報を取り込む画像情報取り込み手段、ならびに、出力部が、制御部に接続されており、制御部が、目標位置特定手段と、目標方向特定手段と、目標方向と電子機器の基準方向との差分を検出する第1の差分検出手段と、相対姿勢特定手段と、ユーザの顔の向きを基準とした目標方向に座標を変換する座標変換手段と、座標変換後の目標方向と座標変換前の目標方向との差分を検出する第2の差分検出手段と、検出された差分情報に基づき、出力部を制御する出力部制御手段とを備え、出力部が、方向を提示する触覚提示手段を備えることを特徴とする。
(もっと読む)
姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラム

【課題】簡易な構成でありながら、位置の発散を抑制して仮想3次元空間における姿勢を適切に算出することができる姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラムを提供する。
【解決手段】センサー情報取得部210は、3つの角速度センサーがそれぞれ検出する3軸回りの角速度情報(GX、GY、GZ)と3つの加速度センサーがそれぞれ検出する3軸方向の加速度情報(AX、AY、AZ)を取得する。姿勢情報算出部220は、角速度情報(GX、GY、GZ)と加速度情報(AX、AY、AZ)に基づいて、仮想3次元空間における姿勢角と位置座標を算出する。特に、姿勢情報算出部220は、加速度情報(AX、AY、AZ)から得られる慣性座標系加速度ベクトル(A)に基づいて固定座標系速度ベクトルを算出し、当該固定座標系速度ベクトルに対応づけて仮想3次元空間における位置座標を算出する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法およびプログラム
【課題】停車時間に拠らずに適切な停車場所を登録する。
【解決手段】ナビゲーション装置10は、位置情報を取得する取得部142と、ユーザ操作に応じて目的地を設定する設定部116と、位置情報を用いて目的地までの経路を案内する案内部124と、ユーザ操作に応じてナビゲーションモードを切り替える切替部118と、切替部によりナビゲーションモードが切り替えられた切替地点の位置情報と目的地とを関連付けて記憶媒体に記録する記録部120と、を備える。
(もっと読む)
携帯端末
【課題】携帯端末を提供する。
【解決手段】携帯端末の現在地を示す現在地情報を取得する現在地情報取得部と、携帯端末の加速度を測定する加速度測定部と、所定の情報に基づいて携帯端末のユーザが列車に乗車するまたはしているか否かを判定する乗車判定部と、携帯端末のユーザが列車に乗車するまたはしており、かつ加速度測定部が所定値以上の減速を検出した場合、現在地情報に関連付けられた駅の識別情報を取得する駅情報取得部と、駅の識別情報に関連付けられた駅の周辺の施設に関する情報である地域情報を取得する地域情報取得部と、表示部と、取得された地域情報を表示部に表示させる表示制御部とを備えた。
(もっと読む)
地磁気センサ及び加速度センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】端末の姿勢が大凡一定となるように所持された携帯端末について、加速度センサ及び地磁気センサを用いて歩行者の進行方向を正確に決定する携帯端末等を提供する。
【解決手段】加速度データから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、鉛直方向上向き加速度の極大点を歩行タイミングとして検出する歩行タイミング検出手段と、加速度データ及び地磁気データを用いて、鉛直方向加速度に直交する水平方向加速度を算出する水平方向加速度算出手段と、歩行タイミングに基づいて、1歩分の水平方向加速度に区分する歩毎加速度区分手段と、主成分分析を用いて、1歩分の水平方向加速度から、歩毎方向を算出する歩毎方向算出手段と、歩毎方向を、奇数歩目又は偶数歩目に交互に分類する歩毎方向分類手段と、奇数歩目の歩毎方向と偶数歩目の歩毎方向との二等分線の方向を、進行方向として算出する進行方向算出手段とを有する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】測位要求に応じて位置データを求める際に、測位衛星を利用した位置の測定が適切に遂行できなかった場合でも、位置データの欠落が生じることのない測位装置、測位方法およびプログラムを提供する。
【解決手段】測位要求がなされた際に、測位衛星を利用した位置の測定を実行させ、この位置の測定が遂行された場合に、この測位結果データを前記測位要求に応じた位置データとして取得する(S43,S44)一方、測位衛星を利用した位置の測定が遂行されなかった場合には、移動方向と移動量とを計測に基づく位置の測定結果データを測位要求に応じた位置データとして取得する(S42,S48)構成とする。
(もっと読む)
歩幅推測方法、移動軌跡算出方法及び歩幅推測装置
【課題】歩幅をより正確に推測するための新たな手法を提案すること。
【解決手段】ナビゲーション装置1において、加速度センサー41の検出結果に対するフィルター処理が行われ、Z軸の加速度のピークが検出されることで、ユーザーの歩行が検出される。そして、フィルター処理されたZ軸の加速度を用いて、ユーザーの歩行速度に応じて予め定められた相関モデル式に従ってユーザーの歩幅が推測される。また、ジャイロセンサー43の検出結果に対してもフィルター処理が行われ、フィルター処理されたZ軸回りの角速度に対する積分処理が行われて、ユーザーの歩行方向が推測される。そして、推測された歩幅と歩行方向とを用いて、ユーザーの移動軌跡が算出される。
(もっと読む)
ナビゲーション装置、ナビゲーション方法およびプログラム
【課題】ナビゲーションモードに適した案内通知を行う。
【解決手段】ナビゲーション装置10は、位置情報を取得する取得部と、ナビゲーションモードを判別する判別部116と、案内地点を検出する検出部140と、前記位置情報を用いて、前記判別部により判別されたナビゲーションモードで前記案内地点までのナビゲーションを実行する実行部と、を備え、前記実行部は、前記案内地点を通過する際に、前記ナビゲーションモードに応じた通知をする。
(もっと読む)
ナビゲーション装置、移動履歴記録方法およびプログラム
【課題】ユーザの所望するナビゲーションモードに切り替えて該ナビゲーションモードごとに移動履歴を管理する。
【解決手段】ナビゲーション装置10は、位置情報を取得する取得部と、複数のナビゲーションモードから一のナビゲーションモードを選択する選択部116と、前記位置情報を用いて、前記選択部により選択されたナビゲーションモードでナビゲーションを実行する実行部と、前記取得部により取得された前記位置情報に基づく移動履歴情報と前記ナビゲーションモードとを関連付けて記憶媒体に記録する記録部144と、を備える。
(もっと読む)
情報処理装置、プログラム、情報処理方法および地図データ
【課題】情報処理装置、プログラム、情報処理方法および地図データを提供する。
【解決手段】デフォルメ地図上の複数地点に位置情報を割り当てる位置情報割当部と、前記複数地点に割当てられた位置情報、および前記デフォルメ地図上での前記複数地点の配置位置に基づき、前記デフォルメ地図上の各地点の位置情報を補間する補間部と、を備える情報処理装置。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】ユーザの現在位置の測位を行う測位装置において、ユーザの移動状態から有り得ない誤った測位結果が使用されることを防止する。
【解決手段】撮像装置1AのCPU10は、GPSユニット31における前回の測位結果と今回の測位結果に基づいて、ユーザの前回の測位位置からの移動距離Lを算出し、3軸加速度センサ16により検出されたユーザの移動状態に基づいて前回の測位位置からユーザが移動し得る距離の許容範囲を設定し、算出された移動距離Lが設定された許容範囲内である場合にGPSユニット31による測位結果を使用し、算出された移動距離Lが設定された許容範囲内ではない場合にGPSユニット31による測位結果を使用しないように制御する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】電力の消費を抑制しつつ、目的の変化に対応して位置精度を向上させる。
【解決手段】GPS受信部14及びCPU10は、所定の測位条件の成立毎に位置情報の測位(GPS測位)を行う。そして、地図データベース24は、一以上の景勝地の位置情報を複数種類のカテゴリーの何れかに対応付けて記憶する。そして、CPU10は、地図データベース24に記憶された景勝地から何れかを設定する。そして、CPU10は、設定された景勝地の属するカテゴリーに対応する大きさの領域を景勝地に対応付けて設定する。そして、CPU10は、GPS測位により測位した位置情報が設定された領域に属しているか否かを判定する。そして、CPU10は、この判定結果に基づいてGPS測位の測位条件を変更する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】測位手段による位置情報の精度の向上を図る。
【解決手段】CPU10は、GPS測位によって得られた少なくとも二以上の位置データに基づいて算出される移動ベクトルと、GPS測位によって得られた位置データとそれぞれ同時期に自律航法測位により得られた二以上の地点における移動ベクトルとをそれぞれ算出する。そして、CPU10は、算出された各移動ベクトルの差が所定範囲以内である場合には、GPS測位によって測定された位置データを移動履歴データ記憶部22に記憶するとともに、各移動ベクトルの差が所定範囲以内でない場合には、前回移動履歴データ記憶部22に記憶されたGPS測位によって測位された位置データを起点として自律航法測位による計測に基づいて算出された位置情報を移動履歴データ記憶部22に記憶する。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム
【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】 移動体の移動速度が様々に変化する場合でも、常に適切な間隔で位置データを記録していくことのできる測位装置、位置データの記録方法およびプログラムを提供する。
【解決手段】 移動体に保持されて現在位置の測定が可能な測位手段と、この測位手段による現在位置の測定を所定間隔で行わせる測位制御手段(S1〜S11)と、前記測位手段の測定によって順次取得される一連の位置データのうち一部の位置データの記録を省いて一部の位置データの記録を行う記録制御手段(S12〜S16)とを備え、移動体の移動速度が大きいときには位置データの記録を省く割合が大きくなり、前記移動体の移動速度が小さいときには位置データの記録を省く割合が小さくなるように、前記一連の位置データの記録制御を行う。
(もっと読む)
歩行計測装置、歩行計測方法およびプログラム
【課題】 歩行体の左右の歩行動作に非対称性があっても、正確な移動方向の計測が可能な歩行計測装置、歩行計測方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて移動方向に関する物理量を検出する検出手段(ステップS1)と、この検出手段の検出により得られる前記物理量を表わす検出データのうち、左足を踏み出す歩行動作の際に得られる検出データと、右足を踏み出す歩行動作の際に得られる検出データとの何れか又は両方を、左右の歩行動作の大きさの違いに基づく前記検出データの差異を均衡させる方向に補正する補正手段(S9〜S11)と、この補正手段により補正された前記検出データに基づいて前記歩行体の移動方向を算出する移動方向算出手段(S12,S13)とを備えている。
(もっと読む)
速度算出装置及び速度算出方法並びにナビゲーション装置及びナビゲーション機能付携帯電話機
【課題】車両の速度を高精度に算出できるようにする。
【解決手段】PND1の制御部12は、自律速度算出部22により、加速度αz及びピッチレートωyの相互相関ρα,ωを用いて当該加速度αz及びピッチレートωyの相関が最も高くなるような時間差ΔTを算出し、設置距離Dを当該時間差ΔTで除算することにより時間差速度VTを算出する。この結果PND1は、GPS信号を受信することができない場合であっても、車両9の速度として当該時間差速度VTを用いることができる。さらにPND1は、時間差速度VTを基に車両9の現在位置を高精度に算出することができ、適切な範囲の地図画面を表示部2に表示できると共に正しい経路案内を行うことができる。
(もっと読む)
移動体搭載用機器
【課題】移動体への取り付け状態によらず、移動体の移動により移動体の或る軸回りに角速度が発生した場合に、その軸とは異なる軸回りの角速度を精度良く得ることが可能となる移動体搭載用機器を提供する。
【解決手段】重力加速度算出部181が出力する重力加速度と、車体加速度算出部182が出力する車体加速度とに基づき、ジャイロセンサ132のピッチ軸と車体の鉛直軸とのなす角度を算出する取り付け角度算出部183と、ジャイロセンサ132が検出するヨー軸回りの角速度と、取り付け角度算出部183が算出した角度とに基づき、ジャイロセンサ132が検出するピッチ軸回りの角速度に含まれる不要成分を算出し、ジャイロセンサ132が検出するピッチ軸回りの角速度から、算出された不要成分を減算する補正部133と、を備える構成とした。
(もっと読む)
停車判定装置
【課題】取り付ける車両によらず適切な停車判定を行うことが可能となる停車判定装置を提供する。
【解決手段】フラッシュメモリ28に閾値が設定されていなければ、ROM16bから初期値の閾値を読み出し、ジャイロセンサ12および加速度センサ13の各軸について検出された動き量が読み出された閾値以下の状態が所定時間継続した場合、停車していると判定し、検出された動き量に基づき閾値を決定し、決定された閾値をフラッシュメモリ28に更新記憶させ、次回はフラッシュメモリ28から閾値を読み出して停車判定を行う。
(もっと読む)
81 - 100 / 322
[ Back to top ]