
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
121 - 140 / 322
位置検出装置
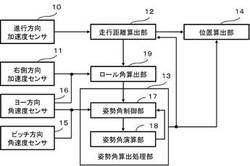
【課題】車速パルス信号を用いずに、移動体の現在位置を精度良く検出できる位置検出装置を提供する。
【解決手段】本発明に係る位置検出装置は、ロール角算出部19は右側方向加速度センサ11とヨー方向角速度センサ16の出力信号に基づいてロール角を算出し、姿勢角算出処理部13は、ピッチ方向角速度センサ15、ヨー方向角速度センサ16、ロール角算出部19の出力信号に基づいて移動体の姿勢角を算出する。進行方向加速度センサ10は移動体の進行方向の加速度を検出し、走行距離算出部12は加速度センサ10において検出された加速度と、姿勢角算出処理部13において算出された移動体の姿勢角に基づいて移動体の走行距離を算出する。位置算出部14は姿勢角算出処理部13において算出された移動体の姿勢角と、走行距離算出部12において算出された移動体の走行距離に基づいて移動体の現在位置を算出する。
(もっと読む)
信号チャネル間の相対的な処理遅延を補償することによる慣性センサ・データの正確な獲得のための方法および装置

本明細書において開示される主題は、複数の座標軸に関係してモバイルデバイスの物理的移動を検出することに適合した複数のセンサによって生成される複数の信号を受信するためのシステムおよび方法に関係する。受信された信号のうちの少なくとも1つがデジタル化される時間は、遅延され、共通の時点に関係して同期される受信された複数の信号のデジタル化されたバージョンの出力を提供する。 (もっと読む)
加速度センサのオフセット誤差を補正する携帯型情報機器、方法及びプログラム
【課題】加速度センサのオフセット誤差を自動的に補正する携帯型情報機器、方法及びプログラムを提供する。
【解決手段】携帯型情報機器は、加速度センサと、地磁気ベクトルと、地磁気ベクトルを用いて加速度センサのオフセット誤差を決定し、そのオフセット誤差によって加速度センサに対して補正する加速度補正手段とを有する。加速度補正手段は、少なくとも4つの時点について、加速度ベクトルにおける地磁気向き加速度を算出する地磁気向き加速度算出手段と、複数の地磁気向き加速度の変動差分値が、所定閾値よりも大きい場合に、加速度センサのオフセット補正が必要であると判定する補正可否判定手段と、加速度センサのオフセット補正が必要であると判定された際に、4つの地磁気向き加速度が一致するように、加速度ベクトルのオフセット誤差を算出するオフセット誤差算出手段とを有する。
(もっと読む)
携帯端末及びその管理システム及び携帯端末の位置データの補正方法、及び補正プログラム
【課題】相対位置データで補正された現在位置データに含まれる累積誤差による精度低下を防止し、携帯端末における現在位置データの精度低下に伴う不都合の発生を防止することができる携帯端末及び管理システムを提供する。
【解決手段】音を取得する集音手段1−3bと、携帯端末1Aの絶対位置を検出する絶対位置検出手段1−1と、携帯端末の相対位置を検出する相対位置検出手段1−2と、集音手段1−3bで取得した音を音声と認識する音声認識手段1−3と、相対位置検出手段1−2で検出した相対位置データで補完された現在位置データを補正する現在位置データ補正手段1−6と、を備えたことを特徴とする。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が携帯端末を手持ちで歩行している場合に、その携帯端末の加速度センサ及び地磁気センサを用いて、歩行者の進行方向を正確に決定する携帯端末等を提供する。
【解決手段】携帯端末は、腕振りに基づく加速度面に対する法線ベクトルとなる歩行基準ベクトルを算出する歩行基準ベクトル算出手段と、重力ベクトルとそれに対応する地磁気ベクトルとを導出し、両ベクトルの方位基準面に対する法線ベクトルとなる方位基準ベクトルを算出する方位基準ベクトル算出手段と、両ベクトルに基づいて進行方向の方位角を算出する方位角算出手段とを有する。歩行基準ベクトル算出手段は、時間経過に伴う合成加速度の変化の中で、極小点同士の間の時間間隔を計測し、隣り合う2つの時間間隔を比較し、長い時間間隔の終点時の極小点は加速度面前方(進行方向前方)を表し、短い時間間隔の終点時の極小点は加速度面後方(進行方向後方)を表す。
(もっと読む)
位置検出装置およびプログラム
【課題】GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出する位置検出装置を実現する。
【解決手段】本装置を携行したユーザが乗車する電車が発車すると、発車時刻と乗車駅名とに基づき時刻表経路検索データベース110を参照して乗車中の電車の路線名を検索すると共に、検索された路線における乗車駅以降の各停車駅毎の駅間距離を取得する。そして、走行中に計測される加速度データに基づきユーザが乗車する電車の移動距離(駅からの移動距離)を算出して地図表示し、発車した電車が駅に停車する毎に、発車駅から停車駅までの距離を時刻表経路検索データベース110から得られる駅間距離に書き換えて位置検出の誤差を補正する。この結果、GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出できる。
(もっと読む)
測位装置及び測位時間間隔制御方法
【課題】消費電力を低減した測位を可能とする。
【解決手段】所定の測位時間間隔で携帯端末100の現在位置を測位する測位部111と、携帯端末100を所持する利用者の動作を検出する体動センサ102と、利用者の平常時における移動状況の経時的な変化を示す平常移動パターンを予め記憶する平常移動パターン記憶部160と、検出された動作から、利用者の移動状況を判定する移動状況判定部113と、判定された以上状況の経時的な変化と平常移動パターンとに基づいて、体動センサ102による動作の検出時点での移動状況と平常移動パターンとが一致しているか否かの度合いを示す平常移動確信度を算出する平常移動確信度算出部114と、算出された平常移動確信度に応じて、測位時間間隔を算出する測位時間間隔制御部115とを備え、測位部111は、算出された測位時間間隔で現在位置を測定する。
(もっと読む)
車両用運転支援装置
【課題】逆走状態をより正確に判断して接触事故を防止することを可能にする。
【解決手段】車両の現在位置を検出する位置検出手段と、水平面に対する道路上の区間ごとの傾斜度の情報を含む地図データを記憶する地図データ記憶手段と、前記位置検出手段が検出した前記車両の現在位置と、前記地図データ記憶手段に記憶された地図データとに基づいて、前記車両の現在位置を道路上の区間にマッチングさせるマップマッチング処理を実行するマップマッチング手段と、水平面に対する前記車両の傾斜度を計測する傾斜度計測手段と、前記マップマッチング手段でマッチングさせた道路上の区間の傾斜度が、前記傾斜度計測手段で計測した傾斜度と所定の値以上異なっているか否かを判定する第1一致判定手段と、前記第1一致判定手段での判定結果に基づいて、前記車両が逆走状態であるか否かを判断する逆走状態判断手段とを備えている。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性とセンサー部の消費電力とのバランスを考慮した適切な位置算出を実現すること。
【解決手段】移動体に保持或いは搭載される携帯型電話機1において、ホストCPU40は、移動体の移動状態を検出するセンサー部90を所定の間欠動作周期で間欠的に動作させるが、この間欠動作周期をGPS衛星信号の受信状況に基づいて可変に制御する。そして、間欠動作周期で動作したセンサー部90の検出結果を用いて所定の慣性航法演算を行って慣性航法演算位置を算出し、GPS算出位置と慣性航法演算位置とを合成して出力位置を決定する。
(もっと読む)
携帯ナビゲーション装置
【課題】GPS電波が届かない場所でも使用でき、歩行者の現在位置を正確に表示できる携帯ナビゲーション装置1を提供する。
【解決手段】
ナビゲーション開始位置において、ユーザが進行予定方向に携帯端末3を向けて方向設定ボタンを押圧する進行方向設定操作を受け付けて、その操作時における携帯端末3の方位をユーザの進行予定方向として記憶する進行方向記憶手段32aを備える。また、保持状態における、携帯端末3が向く方位を携帯保持方向として記憶する保持方向記憶手段32bを備える。さらに、ユーザの歩数を検出する歩数検出手段21を備える。また、進行予定方向と携帯保持方向との関係から、ユーザの進行方向を検出する進行方向検出手段23を備える。そして、予め記憶されたユーザの歩幅と、歩数と、ユーザの進行方向とから、ユーザの現在位置を算出し、地図情報とともに表示する。
(もっと読む)
無線端末装置およびナビゲーション方法
【課題】地図情報を用いることなくユーザをサービス圏外からサービス圏内へと案内することができる。
【解決手段】位置情報記憶部2は、無線基地局と無線通信することができるサービス圏内での位置情報を記憶する。自方向算出部3は、無線端末装置1の向いている自方向を算出する。案内方向算出部4は、位置情報記憶部2に記憶された位置情報、無線端末装置1の現在の位置情報、および自方向算出部3によって算出された自方向に基づいて、無線端末装置1の向いている方向を基準としたサービス圏内の方向を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】GPS衛星からのGPS衛星信号に基づいて、最小二乗法を用いた位置算出処理を行って移動体の位置を算出する。そして、加速度センサ71、ジャイロセンサ73及び方位センサ75を含むセンサ部70の検出結果に基づいて移動体の移動状態を判定し、判定した移動状態に応じて、カルマンフィルタを用いた位置算出処理で用いられる誤差パラメータ(観測誤差共分散行列「R」)及び時変パラメータ(システムノイズ行列「Q」)の値を変更する。そして、算出した位置を、カルマンフィルタ位置算出処理を行って補正する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】携帯型電話機1を保持又は搭載した移動体の移動可能性、不定及び停止可能性それぞれについて、センサ部70の加速度センサ71の検出値適合範囲を設定するとともに、移動可能性の検出値適合範囲を最も広く設定することで、移動体の停止判定用のメンバシップ関数を設定する。そして、メンバシップ関数を用いたファジィ推定演算により移動体が停止状態にあるか否かを判定し、カルマンフィルタを用いた位置算出演算を行う際の誤差パラメータである観測誤差共分散行列「R」及びシステムノイズ行列「Q」の値を、停止状態にあると判定したか否かに応じて変更する。そして、最小二乗法を用いた位置算出処理により算出した移動体の位置を、カルマンフィルタを用いた位置算出処理により補正することで、出力位置を決定する。
(もっと読む)
歩行者用ナビゲーション装置および歩行者用ナビゲーション装置における移動方向検出方法
【課題】消費電力を抑えつつ、歩行者が保持する歩行者用ナビゲーション装置の移動の向きを精度良く検出すること。
【解決手段】座標変換部103は、加速度ベクトルを歩行者用ナビゲーション装置100を基準とした座標に変換し、BPF105は、座標変換後の加速度ベクトルの周波数成分のうち歩行者の歩行周波数成分を透過させ、移動方向(歩行者用ナビゲーション装置基準)検出部106および移動の向き(歩行者用ナビゲーション装置基準)検出部107は、歩行者用ナビゲーション装置100を基準とした座標における歩行者用ナビゲーション装置100の移動方向および移動の向きを検出し、移動の向き(地球基準)算出部109は、地球を基準とした座標における歩行者用ナビゲーション装置100の移動の向きを算出する。
(もっと読む)
車載ナビゲーション装置及び車両方位変更箇所判定プログラム
【課題】ターンテーブル設置箇所のような車両方位変更箇所の特定を演算処理負担の少ない簡単なアルゴリズムで実現する技術を提供する。
【解決手段】自車両の方位変化量と移動距離とに基づく推測位置とGPS測位に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出部18と、この位置ずれ検出部による位置ずれ検出時に自車両位置と推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する車両方位変更箇所判定部20とが備えられる。
(もっと読む)
データ処理装置
【課題】実在しない道路に基づく誤った処理が行われてしまうことを防ぐことが可能なナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、地図データに登録されている道路以外の領域における経路である非道路領域経路について、自車両による当該経路の走行回数と、当該経路を移動することにより、地図データに登録されている道路を移動する場合に比べて短縮される移動距離と、当該経路の周辺における所定の施設の有無とを特定する。そして、特定した内容に基づき、当該経路が実在する道路であることの確度を判定し、この確度に基づき、当該経路が実在する道路であるか否かを判定する。そして、ナビゲーション装置は、実在する道路であると判定された非道路領域経路に基づき、経路案内処理や地図画像表示処理等を行う。
(もっと読む)
航法装置及び推定方法
【課題】航法装置の推定の精度を劣化させることなく、計算量を少なくする。
【解決手段】姿勢角外挿計算部122は、角速度センサ111が計測した移動体座標系における移動体800の角速度ωbに基づいて、慣性座標系における移動体800の姿勢角qnを計算する。速度増分計算部126は、加速度センサ112が計測した移動体座標系における移動体800に加わる加速度abと姿勢角qnとに基づいて、慣性座標系における移動体800の速度の増分Δvnを計算する。速度外挿計算部127は、速度の増分Δvnに基づいて、慣性座標系における移動体800の速度vnを計算する。速度減算部130は、速度vnと、GPS受信機113が計測した慣性座標系における移動体800の速度vgとの差dvを計算する。第一推定部140は、姿勢角qnと、速度の増分Δvnと、速度の差dvとに基づいて、角速度の誤差bgと、姿勢角の誤差εとを推定する。
(もっと読む)
移動要素に剛結合された3軸加速度計の連続的な位置により形成された経路の特徴を決定する装置および方法
移動要素(EM)に剛結合された3軸加速度計(3A)の、前記3軸加速度計(3A)の第1の静止時点(t0)と前記第1の静止時点(t0)に後続する第2の静止時点(tn)との間における連続的な位置により形成された軌跡の特徴を決定する装置であって、前記装置が更に、地球基準座標系に結合された固定グローバル基準座標系(GF)内で、前記第1および第2の静止時点(t0,tn)の間で実質的に一定であるベクトル場のベクトルを測定する追加的な3軸センサであって前記移動要素(EM)に剛結合されていると共に加速度計(3A)の基準座標系内で固定されている追加センサと、制御手段(CMD)とを含んでいる。 (もっと読む)
GPS装置およびその測位方法
【課題】インフラであるDGPS基準局やDGPS信号の受信機構を受信機に搭載していなくても、誤差要因の解消を実現させることができるGPS装置およびその測位方法を提供。
【解決手段】GPSモジュール10置は、センサ処理部12で所定の時間あたりに端末装置の携帯者の加速度およびこの携帯者が進行する方位を取得し、情報処理し、受信処理部16でGPS衛星からのGPS信号48を受信し、受信したGPS信号48に含まれる情報を基に位置情報を取得して、所定の時間にわたって取得した位置情報を保持し、演算部14で取得した携帯者の加速度28および方位30から所定の時間あたりに3次元における軸それぞれの方向成分を用いて、端末装置の移動距離を演算し、演算した移動距離とGPS衛星から取得した位置情報とを用いて、擬似距離の誤差を解消して、GPS衛星の位置情報を補正する。
(もっと読む)
センシング素子、センシング装置、方位検出装置及び情報機器
【課題】高コスト化を招くことなく、小型で高い信頼性を有し、加速度及び地磁気を同時に検出することができるセンシング素子を提供する。
【解決手段】4つの磁気発生部材と、対応する磁気発生部材からの磁気を検出するための4つのTMR素子と、3軸方向に関する地磁気を検出するための3つのTMR素子とが、形成されたセンサ基板121Aと、センサ基板121Aをカバーするカバー部材を有している。そして、センサ基板121Aは、錘部と、可動部とを有し、錘部に4つの磁気発生部材が形成され、可動部にZ軸方向に関する地磁気を検出するためのTMR素子が形成されている。また、カバー部材は、可動部に機械的な力を作用させ、可動部に形成されているTMR素子を傾斜させる。
(もっと読む)
121 - 140 / 322
[ Back to top ]