
Fターム[2F129BB28]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | Y軸(進行方向) (322)
Fターム[2F129BB28]に分類される特許
141 - 160 / 322
センシング素子、センシング装置、方位検出装置及び情報機器
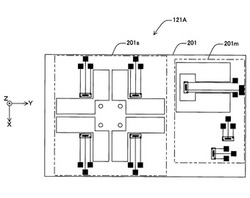
【課題】高コスト化を招くことなく、小型で高い信頼性を有し、加速度及び地磁気を同時に検出することができるセンシング素子を提供する。
【解決手段】4つの磁気発生部材と、対応する磁気発生部材からの磁気を検出するための4つのTMR素子と、3軸方向に関する地磁気を検出するための3つのTMR素子とが、形成されたセンサ基板121Aと、センサ基板121Aをカバーするカバー部材を有している。そして、センサ基板121Aは、錘部と、可動部とを有し、錘部に4つの磁気発生部材が形成され、可動部にZ軸方向に関する地磁気を検出するためのTMR素子が形成されている。また、カバー部材は、可動部に機械的な力を作用させ、可動部に形成されているTMR素子を傾斜させる。
(もっと読む)
地磁気センサを用いて歩行者の端末所持状態を判別する携帯端末、プログラム及び方法

【課題】端末姿勢の変動状態を判別することによって、端末姿勢が変動しない第1の進行方向決定技術と、端末姿勢が腕振りによって変動する第2の進行方向決定技術とを自動的に使い分けることができる携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末は、3軸の地磁気ベクトルを出力する地磁気センサを有し、当該携帯端末に対する地磁気ベクトルの向きの変動量を算出する変動量算出手段と、変動量が所定閾値以上である場合、当該携帯端末は姿勢不変動状態にあり、そうでない場合、当該携帯端末は姿勢変動状態にあると判別する姿勢状態判別手段とを有する。変動量算出手段は、地磁気ベクトルを正規化する正規化手段と、正規化された地磁気ベクトルから、地磁気ベクトル変動量Cを算出する地磁気ベクトル変動量算出手段と、その変動量Cにおける所定個数nの移動平均変動量Caを算出する移動平均変動量算出手段とを有する。
(もっと読む)
速度算出装置、速度算出方法及びナビゲーション装置
【課題】本発明は、道路環境に関わらず、全ての道路環境下で車両の速度を高精度に算出する。
【解決手段】本発明は、路面のうねりによって発生するZ軸方向の加速度αz、及び路面のうねりによって発生するY軸周りのピッチレートωyをそれぞれ3軸加速度センサ4及びY軸ジャイロセンサ5により検出し、当該加速度αz及びピッチレートωyを用いて速度Vを算出することにより、全ての道路環境下で速度Vを正確に算出することができる。
(もっと読む)
移動方向算出装置、移動方向算出プログラムおよび移動方向算出方法
【課題】歩行体が特殊な歩き方をした場合であっても、高精度に歩行体の移動方向を算出可能な移動方向算出装置を提供すること。
【解決手段】移動方向算出装置110は、検出部111によって歩行体100におけるX軸、Y軸、およびZ軸との3軸方向の加速度を検出する。そして、クロススペクトル算出部112では、検出されたZ軸方向の加速度とX軸方向の加速度とクロススペクトルと、Z軸方向の加速度とY軸方向の加速度とクロススペクトルとを算出することによって、歩行体100の上下運動と連動した加速度変化を検出する。判別部113では、算出されたクロススペクトルのうち最大値となる値が、いずれの軸方向の加速度であるかに応じて、歩行体100の移動方向を判別し、出力部114によって、判別された方向を歩行体100の移動方向として出力させる。
(もっと読む)
歩行用案内装置
【課題】目的地までの経路案内と施設情報の報知及び計画通りのペースで経路を移動しているかどうかと、目的地に到着する推定時刻が分かる歩行用案内装置を提供する。
【解決手段】地図情報と歩行者の現在位置情報とにより目的地までの経路案内と、出発時刻を入力して、目的地への予定到着時刻を表示する。画面に表示された地図の周辺部には所望の種類の施設名が表示され、この施設の内容を確認し興味の有る施設であれば前記予定到着時刻を参照しながら訪問地に設定する。施設の情報は施設名の表示位置にカーソルを置きスイッチを操作して、施設情報を出力する機能を備える歩行用案内装置。
(もっと読む)
進路報知装置、判定結果送信装置、これらの装置の制御方法、これらの装置を含む指示方向案内システム、進路報知プログラム、判定結果送信プログラム並びにこれらのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】表示部が無くとも、指示方位に基づいて進路を直感的に理解でき、また携帯性にも優れる。
【解決手段】筐体の位置を示す位置情報を取得するGPS受信制御部45Aと、筐体の姿勢を示す姿勢情報を取得する親機6軸センサ51Bと、位置情報及び姿勢情報に基づいて決定された、現在位置における指示方位が、所定の進路に沿う方向であるか否かの進路判定結果を取得する対親機通信制御部41Aと、取得した前記進路判定結果を報知するバイブレータ8又はLED9を備える。
(もっと読む)
方位追従表示装置、方位追従表示方法および方位追従表示プログラム
【課題】画面に表示された画像によって画面内において認識される方位と現実空間の方位とのずれを低減する方位追従表示装置を提供する。
【解決手段】方位追従表示装置は、画面に対して固定され画面が基準姿勢にあるとき、x軸が現実空間において左右方向に平行でありz軸が画面に対して垂直であるxyz直交座標空間の姿勢を表す正格直交行列である姿勢行列Aにもとづき、画面内において基準水平方位を認識させる画像であって、基準姿勢の画面に表示されると画面内において認識される基準水平方位が現実空間における基準水平方位に一致する画像が、任意の姿勢の画面に表示されるときに、画像から認識される基準水平方位が現実空間における基準水平方位に対して追従するように、画像を回転させる角度θを導出する表示制御手段を備える。
(もっと読む)
モーションセンサ
【課題】物体の特定の1点の3次元運動状態を表す加速度と角速度とを精度良く検出するできるとともに物体の姿勢を検出できる小型のモーションセンサを実現する。
【解決手段】加速度および角速度が検出される物体に固定されるフレームと、一端が前記フレームに結合し他端が前記フレームの内側に突出している複数のビームと、複数の前記ビームのそれぞれの前記他端に結合し複数の前記ビームによって前記フレームの内側において前記フレームに対して運動可能に支持されている環形の可動リングと、前記可動リングに張り渡されたダイヤフラムと、前記ダイヤフラムに結合し前記ダイヤフラムによって前記可動リングに対して運動可能に前記可動リングの内側において支持されている内錘と、前記内錘を周回運動させるための駆動手段と、前記ダイヤフラムに設けられ互いに直交する3軸の角速度成分を検出するための複数の圧電素子と、複数の前記ビームに設けられ互いに直交する3軸の加速度成分を検出するための複数のピエゾ抵抗素子と、を備えるモーションセンサ。
(もっと読む)
車両姿勢角推定装置及びセンサドリフト推定装置
【課題】ドリフト誤差による影響を軽減して、精度よく姿勢角を推定することができるようにする。
【解決手段】前後車体速度を推定する前後速度推定手段12と、横車体速度を推定する横速度推定手段10と、ピッチ角速度を推定するピッチ角速度推定手段24と、ロール角速度センサ20及び上下加速度センサ14からのセンサ信号について、初期不感帯を設定するように補正する初期不感帯補正手段23と、各センサ信号、補正されたロール角速度センサ20及び上下加速度センサ14からのセンサ信号、前後車体速度の推定値、並びにピッチ角速度の推定値に基づいて、ロール角及びピッチ角を推定する姿勢角オブザーバ26と、を備えている。ピッチ角速度推定手段24は、前後車体速度の推定値、横車体速度の推定値、補正されたロール角速度及び上下加速度の各検出値、並びに推定されたロール角及びピッチ角の前回推定値に基づいて、ピッチ角速度を推定する。
(もっと読む)
測位装置
【課題】無駄な電力消費を減らすことができ、且つ、装置の使用中に移動速度が変化した場合でも、適宜な間隔でGPS測位処理を実行することのできる測位装置を提供する。
【解決手段】電源用のバッテリと、このバッテリにより駆動されw、GPS衛星からの測位用電波を受信して現在位置を測定する第1の測位手段とを備えた測位装置である。そして、当該測位装置における装置本体の移動速度を検出する移動速度検出手段(S1,S2)と、この移動速度検出手段により検出された移動速度が所定値以下か否かを判別する判別手段(S3)と、この判別手段により前記移動速度が所定値以下と判別された場合に、前記第1の測位手段を間欠的に駆動させる間欠駆動手段(S11〜S15)とを備えている。
(もっと読む)
ナビゲーションシステムの位置検出装置および位置検出方法
【目的】センサー数が少ないシステムであっても、位置精度や方位精度を向上できるようにする「ナビゲーションシステムの位置検出装置および位置検出方法」を提供することである。
【構成】車速センサーと加速度センサーと角速度センサーとを含むセンサー部、これらセンサーから出力される信号を用いて所定の周期で車両の現在位置、車両速度、車体の姿勢角を含む状態量を計算する自律航法計算部を備え、車両の位置を検出するナビゲーションシステムの位置検出装置である。自律航法計算部は、車速センサーから出力される信号を用いて前回の状態量計算時刻から今回の状態量計算時刻までに移動した移動量を計算する移動量算出部、車体の姿勢変化量を計算する変化量検出部、姿勢変化量を用いて移動量を車体の前後方向、車体の左右方向、車体の上下方向の方向成分に分解する移動量分解部、各方向成分を用いて今回の状態量計算時刻における車両の位置を計算する状態量計算部を備えている。
(もっと読む)
移動端末、現在位置表示方法、および現在位置表示プログラム
【課題】外部から測位用電波を正確に受信できない環境下においても精度良く現在位置を取得することができる移動端末を提供する。
【解決手段】移動端末100は、表示部110Aと、地図を表示するための地図データと、位置座標に対応付けられた目印とを記憶する記憶部113と、移動端末の予想現在位置を取得する位置取得手段102Aと、移動端末の移動方向を取得する方向取得手段107Aと、記憶部を参照して、予想現在位置と移動方向とに基づき、予想現在位置の周辺に位置する目印を抽出する抽出手段106Cと、表示部に、抽出手段によって抽出された目印を選択可能に表示させる表示制御手段106Dと、目印の選択を受け付ける操作部とを備える。表示制御手段は、記憶部を参照して、表示部に、選択された目印を中心とした地図を表示させる。
(もっと読む)
車載通信装置、及びナビゲーション装置
【課題】車車間通信情報による案かな安全運転支援サービスを実現する車載通信装置を提供する。また、本車載通信装置を導入後に、ナビゲーション装置を後から装着しても車載通信装置との接続を可能とした安全運転支援サービスを提供する。
【解決手段】自車両の車両走行情報を生成し周辺車両と送受信し、自車両の走行に注意警戒が必要な情報を受信した場合は、ドライバに通知する。またナビゲーション装置と接続するナビ接続手段を搭載し、ナビゲーション装置と接続している場合には、車両走行情報生成処理をナビゲーション装置で行うことにより、車載通信装置導入後にナビゲーション装置を搭載する場合にも対応することが可能となる。
(もっと読む)
ナビゲーションデータを三次元で表示するコンピュータ装置および方法
本発明は、プロセッサ(11)および当該プロセッサ(11)へアクセス可能なメモリ(12、13、14、15)を備えるコンピュータ装置に関する。メモリは、前記プロセッサ(11)に、(a)ナビゲーション情報を取得させる、(b)そのナビゲーション情報に対応する画像を取得させる、(c)その画像およびそのナビゲーション情報の少なくとも一部を表示させるように構成されたデータおよび命令を備えるコンピュータプログラムを備え、そのナビゲーション情報の少なくとも一部はその画像に重ね合わせられる。プロセッサ(11)は、(b1)その画像に対応する深さ情報を取得し、その深さ情報を使用してアクション(c)を実行することをさらに許可される。  (もっと読む)
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びプログラム
【課題】トンネルの状況を直観的に把握すること。
【解決手段】
自車が走行する経路を含む地図画像を表示するナビゲーション装置において、自車が走行するトンネルの形態を表すトンネル案内画像P1が表示される。この例の場合、入口から出口までのトンネル全体を横から見たときの断面が模式的に描かれている画像を含むトンネル案内画像P1が表示される。
(もっと読む)
走行状態推定システム
【課題】自律航法システムとGPSの各方式間の信号の遅延時間を高精度に補償して最終的に決定される測位データの精度を向上させること。
【解決手段】GPS信号に基づき第一のサンプリング周期で測位データを演算して推定手段に出力するGPS測位演算手段と、第一のサンプリング周期より短い第二のサンプリング周期で観測データを出力する自律航法用センサと、第一のサンプリング周期内に自律航法用センサから出力された観測データの組を所定の一次関数に近似する近似式演算手段と有し、該近似式演算手段が、測位データと略同期したタイミングにおける一次関数の近似式の値を切片の値とし、該切片の値を該近似式の傾きの値とともに自律航法データとして推定手段に出力するように構成された走行状態推定システムを提供する。
(もっと読む)
走行位置検知装置
【課題】移動体の位置の検出精度を向上させる。
【解決手段】GPS電波受信アンテナ11の傾斜装置21は、回動軸および三角形状の板であるフレームを有する。走行位置検知装置10の装置本体には、回動軸が装置本体を貫通して移動体5の移動方向に軸方向が沿うように取り付けられる。フレームは、一頂点付近を回動軸が貫通して平板方向が回動軸の軸方向に対して直交するように回動軸に取り付けられる。移動体5が傾斜した場合には、GPS電波受信アンテナ11の平板方向が水平方向に沿ってGPS電波受信アンテナ11の受信面が重力に従って天頂方向を向くように、GPS電波受信アンテナ11がフレームおよび回動軸を介して移動体5に対して当該移動体5の移動方向に直交した方向に回動する。
(もっと読む)
表示制御方法、及び車載装置
【課題】車両が走行中であっても表示画面の視認性を確保することが可能な表示制御方法等を提供する。
【解決手段】表示切替処理では、車両に設けられた操作ノブの動きを表す変位ベクトルを取得し(S110)、この変位ベクトルの大きさ(可動部変位量)と振動閾値とを比較して、可動部変位量が振動閾値以下である状態が一定期間連続したか否かを判定する(S140〜S160)。ここで肯定判定した場合(S160;YES)、画面上にカーソルが表示されていれば(S165;YES)、カーソルを非表示状態に切り替える(S170)。逆に、可動部変位量が振動閾値を超える場合(S140;NO)、画面上にカーソルが表示されていなければ(S175;NO)、カーソルを表示状態に復帰させる(S180)。さらに、判定精度を上げるために、振動閾値を車両の加速度を表す車両情報に応じて可変設定する(S130)。
(もっと読む)
移動体用測位装置
【課題】本発明は、移動体のリアルタイムの位置を、高精度で測位する移動体用測位装置を提供することを目的とする。
【解決手段】現在時刻における移動体の位置を測位し、所定の出力周期で出力する移動体用測位装置100であって、
前記現在時刻が、GPS演算データ更新時には、GPS演算データ、慣性航法測位手段30、速度検出手段40及び誤差補正手段50を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、移動体モデル演算手段60が前記現在時刻までの移動体モデルを演算して前記移動体の位置を測位し、
前記現在時刻が、前記GPS演算データ更新時と異なったときには、前記慣性航法測位手段、前記速度検出手段及び前記誤差補正手段を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、前記移動体モデル演算手段が前記現在時刻までの移動体モデルを演算し、前記移動体を測位することを特徴とする。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された地磁気センサのみを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末の進行方向決定手段は、腕振り運動に基づく加速度面に対する法線ベクトルとなる歩行基準ベクトルを算出する歩行基準ベクトル算出手段と、加速度データ及び地磁気データから、重力ベクトルと、該重力ベクトルに対応する地磁気ベクトルとを導出し、重力ベクトル及び地磁気ベクトルの方位基準面に対する法線ベクトルとなる方位基準ベクトルを算出する方位基準ベクトル算出手段と、歩行基準ベクトル及び方位基準ベクトルに基づいて、進行方向の方位角を算出する方位角算出手段とを有する。
(もっと読む)
141 - 160 / 322
[ Back to top ]