
Fターム[2F129BB31]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659)
Fターム[2F129BB31]の下位に属するFターム
Fターム[2F129BB31]に分類される特許
1 - 2 / 2
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
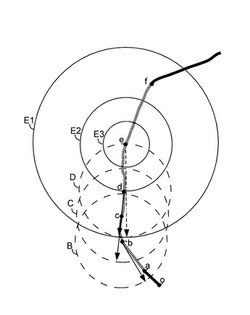
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
GPS受信装置およびGPS受信装置における誤差円半径の設定方法

【課題】 GPSによる測位誤差を正確に反映した誤差円半径を設定できる「GPS受信装置およびGPS受信装置における誤差円半径の設定方法」を提供する。
【解決手段】 誤差円半径の設定方法は、2次元測位時に、3次元測位時の高度情報、垂直方向の測位位置精度情報、および速度情報を利用して高度誤差を予測するステップと、予測された高度誤差に基づき2次元測位時の測位誤差を示す誤差円半径を設定するステップと、2次元測位または3次元測位の測位結果に基づき移動特性を算出するステップと、算出された移動特性に基づき設定された誤差円半径を修正するステップとを有する。
(もっと読む)
1 - 2 / 2
[ Back to top ]