
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
201 - 220 / 2,582
移動体測位方法、移動体測位装置
【課題】高精度な移動体測位方法を実現する。
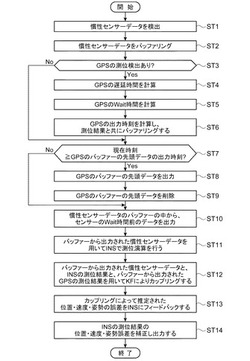
【解決手段】移動体測位方法は、慣性センサーデータをバッファリングすることと、バッファリングされた前記慣性センサーデータを用いてINS測位演算を行うことと、現在時刻に対するGPS測位の遅延時間を計算することと、GPSデータの出力時刻とGPS測位結果とをバッファリングすることと、バッファリングされた前記GPS測位結果とINS測位結果との時刻同期をとることと、バッファリングされた前記慣性センサーデータと、前記慣性INS測位結果と、バッファリングされた前記GPS測位結果と、をカップリングし、位置・速度・姿勢の誤差を推定することと、前記位置・速度・姿勢の誤差を前記INS測位結果にフィードバックし、補正する。GPSデータと慣性センサーデータの時刻同期をとり、正確なINS測位結果の誤差補正を行うことによって、高精度な移動体測位を行うことができる。
(もっと読む)
ナビゲーションシステム、プログラム、及び、ナビゲーション装置

【課題】車両が目的地付近に接近したときに利用可能な駐車エリアを適切に特定し、案内可能なナビゲーション装置を提供する。
【解決手段】車載用ナビゲーション装置は、地図データ記憶部30に記憶された地図データに基づいて設定された目的地に自車両が接近したとき(S102:YES)、所定範囲内に位置する他車両から位置情報及び設定されていた目的地情報を含む車両情報を受信する(S107)。そして、受信した車両情報と地図データとに基づいて、利用可能な駐車エリアを特定して駐車場データを作成し(S108)、当該駐車場データに基づいて利用可能な駐車場を案内する(S110)。これにより。自車両が目的地に接近したときに、他車両から送信される車両情報に基づいて、利用可能な駐車エリアを特定するので、利用可能な駐車エリアを適切に特定して案内することができ、利便性が向上する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
測位システム、測位方法
【課題】慣性センサーデータとGPS測位データとを融合した高精度な測位方法を実現する。
【解決手段】測位方法は、慣性センサーデータとGPS測位データとを融合して移動体を測位する測位方法であって、慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、GPS測位データに基づき、拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、推定された位置誤差・速度誤差・方位角誤差・ジャイロバイアス誤差・加速度バイアス誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、を有する。
(もっと読む)
鉄道車両の位置検出装置および位置検出方法
【課題】駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置を提供する。
【解決手段】GPS計測機33により求められた保全車両Hの概略位置を入力すると共に移動距離を算出する距離算出部21と、データ取得部22で取得された保全車両Hの角速度ω及び角加速度ω´を入力して進行方向をファジィ推論により推定する進行方向推定部23と、距離算出部21で算出された移動距離及びGPS計測機33により求められた概略位置を入力し且つ進行方向推定部23から進行方向を入力して分岐点を推定する分岐点推定部25と、データ取得部22で求められた変位角θ及び進行方向推定部23で推定された進行方向を入力して分岐角を検出すると共に当該分岐角に対応する分岐線番を出力する分岐角検出部26とを具備したもの。
(もっと読む)
地図表示装置及びナビゲーション装置
【課題】多くのテキストを、視認性を担保しつつ地図上に表示する「地図表示装置及びナビゲーション装置」を提供する。
【解決手段】地図上で他テキストの上に重なる位置に配置されるテキストをフロートテキスト304として表示する(a)。フロートテキスト304に対するユーザの移動操作が発生したならば(b)、移動操作の対象となったフロートテキスト304の表示属性を所定の表示属性に変更した上で、その表示位置を移動する(c)。フロートテキスト410の表示位置の移動は、フロートテキスト410について受けつけた指310の移動量と同じ量、指310の移動方向にフロートテキスト410の表示位置を移動することにより行う。フロートテキスト410の表示属性の変更は、フロートテキスト410の透明度を大きくすることにより行う。
(もっと読む)
撮影位置特定システム、撮影位置特定プログラム、及び撮影位置特定方法
【課題】実風景画像の撮影時の気象条件によらず良好に当該実風景画像の撮影位置を特定することが可能な技術を実現する。
【解決手段】参照用データRDを、当該参照用データRDを構成する単位参照データの生成元の風景画像の撮影位置に関連付けて記憶する参照データ記憶部11と、実風景画像SPに基づき生成される実風景データADと参照用データRDとのマッチングを行い、実風景画像SPの撮影位置を特定する撮影位置特定部40と、実風景データADと参照用データRDとのマッチングに際し、実風景画像SPの撮影領域を分割してなる複数の分割領域のそれぞれについて、分割領域の撮影領域中の位置と、現在気象条件情報CWと、過去気象条件情報PWとに基づき、参照用データRDを構成する単位参照データの群の中から各分割領域に対応する単位参照データを選択する単位参照データ選択部42を備える。
(もっと読む)
案内装置、案内方法、および、案内プログラム
【課題】目印対象物の認識精度を向上可能な案内装置、案内方法、および、案内プログラムを提供する。
【解決手段】目印対象物の画像認識に係る認識テンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する。また、案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断し、認識自信度が向上したと判断された場合(S120:YES)、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する(S121)。これにより、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
(もっと読む)
位置情報取得システム及びプログラム
【課題】車両の正確な位置情報を提供することが可能な位置情報取得システム及びプログラムを提供する。
【解決手段】車両用警報装置10には、車両のシガーソケットに接続されたシガープラグコードを接続するためのDCジャック21が設けられている。前記シガープラグコードをDCジャック21に接続することにより、車両用警報装置10は車両から電源供給を受けて動作を行うことができる。車両には、直流の電源とこれを充電するオルタネータが設けられており、走行時における電源からの電圧には、オルタネータノイズが重畳される。制御部は、オルタネータノイズを検出するノイズ検出部を備えており、車両から電源供給を受けて動作を行う場合、オルタネータノイズから車両のエンジン回転数を導出する。そして、GPS測位不可能となった場合には、エンジン回転数に基づいて車両の速度を導出し、車両の位置情報を表示する。
(もっと読む)
データ管理システム、データ管理方法、及びデータ管理プログラム
【課題】コストの上昇を抑えつつ十分な量の参照データを整備し、精度の高い位置同定を可能とする技術を実現する。
【解決手段】車両Vからの風景の撮影画像Iを記憶し、当該記憶された撮影画像Iに基づいて画像マッチングのための参照データRを整備するデータ管理システム。退出路Eを有する施設から車両Vが退出したとき、車両Vが実際に走行した実走行退出路を特定する実走行退出路特定部と、退出路進入点から実走行退出路と施設の外の道路との接続地点までの退出区間Fを設定する退出区間設定部と、退出区間F内に、当該退出区間F内で所定の音声案内を完了可能な案内開始地点の設定可能範囲である案内開始区間Gを設定する案内開始区間設定部と、案内開始区間G内で撮影された少なくとも1つの撮影画像Iに基づいて参照データRを生成する参照データ生成部と、を備える。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
符号化されたマーカーを用いたナビゲーションシステム及び方法
【課題】広範囲に及ぶデータベースや大きな計算資源を必要とせず、容易に実現可能なナビゲーションシステム及び方法へのニーズが存在する。
【解決手段】ナビゲーション環境の中に配置される、符号化されたマーカーを用いた、ナビゲーション環境の中のナビゲータの位置を決定するためのナビゲーションシステム及び方法が開示される。ナビゲーションシステムは:ナビゲーション環境の中の少なくとも一つの符号化されたマーカーの画像を含む場面の画像を取得するよう構成されるカメラ装置と;前記少なくとも一つの符号化されたマーカーを読み取るよう構成されるビデオ分析手段と;前記ビデオ分析手段と接続され、前記少なくとも一つの符号化されたマーカーの既知の場所に基づいてナビゲータの位置を決定するよう構成されるプロセッサと;を有する。
(もっと読む)
経路演算装置
【課題】リアルタイムな情報に対応した経路探索を効率的に実行する。
【解決手段】経路探索前に隣接メッシュとの境界上の図郭ノードと他の図郭ノードとの間のメッシュ内の経路コストを予め計算し、メッシュコストデータを生成する。出発地から目的地までの経路探索の際に、出発地近傍の図郭ノードと目的地近傍の図郭ノードとの間の移動経路は、メッシュコストデータが最小となるように探索する。このようにして探索した移動経路に含まれる道路リンクのうち、メッシュ内の経路コストの計算に用いたリンクコストと、リアルタイム交通情報を考慮したリンクコストとの差が閾値以上の場合、そのリンクを含むメッシュにおける現況交通情報を考慮したメッシュ内の経路コストを再計算してメッシュコストデータを更新する。更新したメッシュコストデータに基づく再探索によって、メッシュ内経路を含む移動経路を特定する。
(もっと読む)
位置履歴管理装置、位置履歴管理システム、サーバ装置、位置履歴管理方法、および、プログラム
【課題】時系列において前の位置情報の履歴に基づいて補正する場合に比べて精度の高い補正必要性の判断を行うことができる、位置履歴管理装置、位置履歴管理システム、サーバ装置、位置履歴管理方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、位置情報を時系列に記憶し、道路網を規定する道路ネットワークデータを記憶し、位置情報に対応する道路ネットワークデータをマッチングにより特定し、対象とする位置情報について特定した道路ネットワークデータと、当該対象とする位置情報から時系列的に後または前後の位置情報について特定した道路ネットワークデータとを比較して、当該位置情報間の接続性を判定し、判定した接続性の判定結果に基づいて、対象とする位置情報の補正が必要か否かを判定する。
(もっと読む)
交通情報配信システム
【課題】ユーザに必要な交通情報を配信しつつ、情報通信量を削減できる交通情報配信システムを提供すること。
【解決手段】センター10から車両に搭載されたナビゲーション装置100に対して交通情報を配信する交通情報配信システムである。センター10は、各道路の車両情報を受信して、この車両情報に基づいて各道路の交通状況を示す交通情報を生成し、生成した交通情報を記憶部12に記憶する(S30〜S32)。また、センター10は、今回生成した交通情報と前回生成した交通情報とを比較することで、前回生成した交通情報に対して今回生成した交通情報が変動しているか否かを判定する(S33,S34)。そして、センター10は、交通情報の変動がないと判定した場合は交通情報の配信を中止し、変動があると判定した場合はナビゲーション装置100に対して交通情報を配信する(S35)。
(もっと読む)
自車両位置特定装置
【課題】 複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる自車両位置特定装置を提供する。
【解決手段】車車間通信ECU1は、車車間通信情報処理部11において、自車両VSの走行開始を判断する。また、車車間情報処理部11は、他車両V1から送信される他車両情報に基づいて他車両の位置を取得する。退出出口推定部14は、他車両の位置に基づいて、自車両VSが退出した出口が、複数の出口のいずれであるかを推定する。
(もっと読む)
経路案内装置、経路案内プログラム、及び経路案内方法
【課題】自位置が経路案内地点に到達するまでに、音声による経路案内を完了できる経路案内装置を提供する。
【解決手段】案内地点に関する同趣旨の経路案内のための案内音声であって発音時間が段階的に異なる複数種類の案内音声を生成可能に構成され、案内地点に関する経路案内を行うに際して、判定された推定到達時間以内で発音時間が最も長い案内音声を生成する案内音声生成部35を備えた経路案内装置1。
(もっと読む)
物体の位置を特定する電子システム
【課題】物体の位置を特定する電子システムを提供すること。
【解決手段】物体の計算方位およびデータベースに格納された道路区間の方位に従って、方位一致道路(OMR)区間のセットを求めてデータベースを探索する。物体の計算位置およびOMR区間の位置に従って、位置一致道路(PMR)セットを求めてOMR区間を探索する。PMRセットは1つまたは複数のPMR区間を含む。PMRセットを使用して物体の位置を特定する。
(もっと読む)
車載用ナビゲーション装置およびナビゲーション方法
【課題】従属地点を有する地点へのナビゲーションを距離的および時間的に効率良く行うことができ、利便性を向上させることができる「車載用ナビゲーション装置およびナビゲーション方法」を提供すること。
【解決手段】自車が最適従属地点(目的地/経由地)に向かう経路誘導の際に最適従属地点最適経路から逸脱した場合には、最適従属地点選択装置26によって最適従属地点を再選択し、再選択された最適従属地点が新たな最適従属地点の場合には、これを目的地/経由地設定装置20によって新たに目的地/経由地に設定して、この新たな最適従属地点に対応する最適従属地点最適経路を経路探索部22によって再探索すること。
(もっと読む)
加速度検出方法、位置算出方法及び加速度検出装置
【課題】移動体の加速度をより適切に検出するための新しい手法の提案。
【解決手段】姿勢調整部20は、移動体に設置された姿勢センサー4の検出姿勢を、移動体に設置された加速度センサー3の検出加速度ベクトルと移動体の移動に係る所与の参照ベクトルとを用いて調整する。そして、座標変換部30は、姿勢調整部20により調整された検出姿勢を用いて、移動体のローカル座標系から絶対座標系への座標変換に係る変換係数を求め、当該変換係数を用いて、加速度センサー3の検出加速度ベクトルを絶対座標系における加速度ベクトルに座標変換する。
(もっと読む)
201 - 220 / 2,582
[ Back to top ]