
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
121 - 140 / 2,582
経路比較装置、経路比較方法、及びプログラム
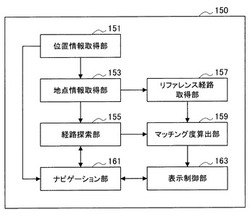
【課題】経路情報のデータ構造や格納方式が異なる場合であっても、経路同士を比較して一致度合いを算出することができる経路比較装置、経路比較方法、及びプログラムを提供する。
【解決手段】経路比較装置は、スタート地点及びゴール地点の位置情報を取得する地点情報取得部と、上記スタート地点及び上記ゴール地点間のリファレンス経路の形状データを取得するリファレンス経路取得部と、上記スタート地点及び上記ゴール地点間の経路を探索する経路探索部と、上記経路探索部により探索された探索経路の形状データと、上記リファレンス経路の形状データとを比較することにより上記経路間の一致度合いを示すマッチング度を算出するマッチング度算出部と、を有する。
(もっと読む)
表示制御装置、及び案内経路表示方法

【課題】進路および進路を変更する際の目印となる施設を認識しやすい表示を行う。
【解決手段】地図データベースを参照して探索された案内経路と前記地図データベースに基づいた地図画像とを表示手段に表示する表示制御手段を備えた表示制御装置において、前記表示制御手段は、前記表示手段に表示する地図画像のうち、前記案内経路に基づいた所定範囲と前記所定範囲外とを異なる表示態様で描画するとともに、前記案内経路の経路案内を行なう際に用いる案内施設と前記所定範囲外とを異なる表示態様で描画し、前記表示手段に表示することを特徴とする。
(もっと読む)
情報提供システム、情報提供方法および情報提供装置
【課題】ユーザの目的地に関する情報を提供するサービスにおいて、ユーザによる目的地の指定を容易化する。
【解決手段】携帯情報端末10は、地図を撮像してその画像を取得する。ナビゲーションサーバ12は、地図に記載されるランドマークの識別記号と、そのランドマークの現実の位置とを対応づけて記憶した記憶領域を参照し、携帯情報端末10により取得された地図画像に記載された複数のランドマークそれぞれの識別記号に応じて、各ランドマークの現実の位置を特定する。ナビゲーションサーバ12は、地図画像におけるユーザの目的地を取得し、複数のランドマークそれぞれの現実の位置に応じて目的地の現実の位置を特定する。携帯情報端末10は、ナビゲーションサーバ12により特定された目的地の現実の位置に応じた目的地に関する情報をユーザへ提示する。
(もっと読む)
エネルギー消費量計算装置とそのエネルギー消費量計算方法
【課題】 本発明の目的は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現することにある。
【解決手段】
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、エネルギーを供給するエネルギー供給手段が所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、エネルギー消費量推定手段が推定した所定の区間におけるエネルギー消費量と所定の区間におけるエネルギー消費実績量との差に応じて、エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、エネルギー消費量補正手段により補正した所定の区間のエネルギー消費量を用いてエネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示手段と、を備えることを特徴とする。
(もっと読む)
腕装着型端末、ナビゲーションシステム、及び、プログラム
【課題】必要なナビゲーション情報を容易に取得可能な腕装着型端末、ナビゲーションシステム、及び、プログラムを提供する。
【解決手段】外部機器との間で無線通信によりデータの送受信を行う無線通信手段と、設定された期間に亘り、無線通信手段を用いて携帯型外部機器からナビゲーションデータを取得する制御手段と、制御手段からの制御信号に基づく表示を行う表示手段と、を備え、制御手段は、無線通信手段により携帯型外部機器から取得したナビゲーションデータに基づいて、簡易ナビゲーションデータを表示手段に表示させる。
(もっと読む)
旅行時間情報処理装置及び走行経路探索システム
【課題】交通状況の変化後の状態が定常的な状態となる場合であっても統計旅行時間の質を向上させることが可能となる旅行時間情報処理装置及び走行経路探索システムを提供する。
【解決手段】非定常データ記憶部306に記憶した非定常データの交通情報が定常性を有すると判定した場合は、その交通情報を定常データ記憶部305に記憶し、以後においては定常データとして扱うようにしたので、交通状況が変化した場合であっても統計旅行時間の質を向上させることができると共に、質の高い統計旅行時間に基づいて最適な経路情報を推測してナビゲーション装置に対して送信することができる。
(もっと読む)
電子機器
【課題】位置情報の算出に要する時間をより効果的に短縮可能な電子機器を提供すること。
【解決手段】衛星運行情報生成部122は、航法衛星から受信した電波信号に基づいて衛星運行情報を生成して記憶部130に記憶する。通信部70は、航法衛星からの電波信号を受信する機能を有し、直接無線通信が可能な距離にある他の電子機器との間で直接無線通信を行う。衛星運行情報受信部22は、通信部70を介して当該他の電子機器から衛星運行情報を受信する。衛星運行情報更新部24は、衛星運行情報受信部22が受信した衛星運行情報と記憶部130に記憶された衛星運行情報とを照合し、照合結果に応じて、衛星運行情報受信部22が受信した衛星運行情報を用いて記憶部130に記憶された衛星運行情報を更新する。位置情報算出部124は、記憶部130に記憶された衛星運行情報に基づいて自己の位置情報を算出する。
(もっと読む)
案内情報出力装置
【課題】複数車線道路を走行時に、現在走行中の車線に応じて運転者に対する案内情報を適切に行う。
【解決手段】車両の現在位置を検出する現在位置検出手段と、車線情報を含む道路データを記憶した地図記憶手段と、目的地までの経路を探索する経路探索手段と、走行中の道路が複数車線を有した道路か否かを判定する道路種別判定手段と、道路種別判定手段により、走行中の道路が複数車線を有した道路であると判定された場合、車両が走行中の車線を判定する走行車線判定手段と、走行車線判定手段により判定された車線と現在位置前方にある分岐点における車両の進行方向とが対応していない場合、案内情報を出力する案内出力手段と、案内情報出力装置は、車両の挙動を検出する挙動検出手段を備え、経路探索手段は、挙動検出手段が、案内情報が出力されてからの車両の挙動を検出できない場合、分岐点で経路を逸脱して目的地に向かう経路探索を行う。
(もっと読む)
速度検出装置及び方法
【課題】移動体の速度を自律航法手段により高精度に検出することのできる速度検出装置及び方法を提供する。
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両のロールあるいはピッチングを加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された垂直線分を有する固定物を利用して、車両Vのロール角が検出される。また、水平線分を有する固定物を利用して、車両Vのピッチング角が検出される。物体検出センサ1で検出された固定物の位置情報が、決定されたロール角とピッチング角とに基づいて、車両Vが水平状態にあるときの位置情報に変換される(補正)。
(もっと読む)
進行方位算出装置、進行方位算出方法及び進行方位算出プログラム並びにナビゲーション装置
【課題】進行方位を精度良く算出できるようにする。
【解決手段】本開示の進行方位算出装置は、使用者の歩行に伴い発生する加速度のうち、鉛直方向の加速度を表す鉛直加速度と、水平面内における加速度の方位及び大きさを表す水平加速度とを検出する検出部と、鉛直加速度のゼロクロス点を基に、使用者の2歩に相当する期間を歩行周期として設定する歩行周期設定部と、歩行周期内において、水平加速度の大きさが極小となる位相を基に、使用者の進行方向への加速と減速とが切り替わる加減速切替位相を設定する加減速切替位相設定部と、加減速切替位相毎に区切られた各区間を交互に加速区間又は減速区間として推定する加減速区間推定部と、減速区間では水平加速度が表す方位に基づき、加速区間では水平加速度が表す方位と反対の方位に基づき、使用者の進行方位を決定する進行方位決定部とを設けるようにした。
(もっと読む)
位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラム
【課題】GPS衛星が不可視である環境下で高精度に位置を標定する。
【解決手段】標定装置記憶部290は補正対象の計測経路データ291と計測経路データ291に対応する計測点群データ292(対象点群データ)と参照する計測点群データ292(参照点群データ)とを記憶する。計測経路データ291は計測車両の座標値を含むデータである。計測点群データ292は計測車両を用いて計測した計測領域内の計測点の座標値を含むデータである。対象領域決定部233は計測領域内の特定領域を決定する。領域座標値算出部241は特定領域の対象点群データに基づいて特定領域の第一の領域座標値293を算出し、特定領域の参照点群データに基づいて特定領域の第二の領域座標値293を算出する。位置補正部242は第一の領域座標値293と第二の領域座標値293との差(座標値補正量294)に基づいて補正対象の計測経路データ291を補正する。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
ナビゲーション装置
【課題】ユーザの感覚にマッチした形態で、環状交差点を案内する「ナビゲーション装置」を提供する。
【解決手段】環状交差点へのスムーズな進入/退出のために、道路の方向の環状交差点の周回方向への変化が開始する地点を参照地点として求め、進入路については求めた参照地点から対象環状交差点の中心Oに向かう方向を道路方向として算出し、退出路については対象環状交差点の中心Oから求めた参照地点に向かう方向を道路方向として算出する。そして、各退出路の退出路方向を、進入路の道路方向を上方向としたときの方向として算出し、算出した退出路方向を各退出路方向として環状交差点の通過方向を案内する。
(もっと読む)
表示制御装置及び表示制御方法
【課題】探索した経路が、施設を通過する場合、施設内の経路を表示できる縮尺を特定し、特定した縮尺に基づいて経路を表示する。
【解決手段】地図情報を参照して探索された目的地までの経路が施設内を通過する場合に、前記経路上の前記施設へ進入する地点から前記経路上の前記施設から退出する地点までの経路を表示させる制御部を備えた表示制御装置であって、前記制御部は、前記進入する地点から前記退出する地点までの経路の経路データ、表示方向、及び、前記進入する地点から前記退出する地点までの経路を表示させる表示領域の大きさに基づいて前記進入する地点から前記退出する地点までの経路を表示させる際の縮尺を特定し、前記特定した縮尺に基づいて、前記進入する地点から前記退出する地点までの経路を表示させることを特徴とする。
(もっと読む)
携帯端末、位置検出方法、プログラム
【課題】携帯端末の周囲の金属物の有無を考慮して位置検出動作を行う。
【解決手段】携帯端末は、地磁気を検出する地磁気検出部12と、位置を検出する位置検出部11と、前記地磁気検出部12の検出状態を判定する判定部13と、前記判定部13の判定結果に基づいて、前記位置検出部11の位置検出動作を切り替える制御部14と、を有する。前記制御部14は、前記地磁気検出部12の検出状態が有効または無効のいずれであるかに基づいて、該位置検出動作を開始してから停止するまでの時間であるタイムアウト時間を切り替える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】慣性測位用ユニット及び衛星測位用ユニットそれぞれの計測結果を併用して、位置をより正確に算出するための手法の提案。
【解決手段】位置算出装置1において、移動体に設置された慣性測位用ユニット2の計測結果を用いて、少なくとも移動体の位置を演算する第1の演算処理が第1の演算処理部5により実行される。また、第1の演算処理の結果と、移動体に設置された衛星測位用ユニット3の計測結果とを用いて、移動体の位置を演算する第2の演算処理が第2の演算処理部7により実行される。そして、第1の演算処理の結果と、第2の演算処理の結果とを用いて、第1の演算処理に係る演算係数が演算係数調整部9により調整される。
(もっと読む)
ナビゲーション装置
【課題】地図画面とメニュー画面の利便性に優れたナビゲーション装置を得る。
【解決手段】この発明に係るナビゲーション装置は、表示制御部が、操作入力部からの操作情報によりメニュー画面を表示するとき、経路探索部または自車位置特定部から得られる移動体の走行状態の情報を用いて地図画面またはメニュー画面の表示形態を決定し、表示部がメニュー画面を地図画面上に表示する際に、移動体の走行状態の情報として、移動体の移動速度を用いて地図画面の表示面積は変更せずにメニュー画面の表示面積を変更するものである。
(もっと読む)
マルチセンサ判定装置及びプログラム
【課題】所定時間内に観測された観測値の大半を外れ値が占める場合であっても、適切に外れ値を判定する。
【解決手段】状態推定部20で、マルチセンサ12で観測された観測値D(各観測値d)から推定値xを推定し、事前分布算出部26で、観測値Dから推定される推定値xの事前確率分布p(x)を算出し、事後分布算出部28で、観測プール24に記憶された観測値Dを用いて、観測値Dの尤度p(D|x)、及び推定値の事前確率分布p(x)に基づいて、推定値の事後確率分布p(x|D)を算出する。観測値分布算出部30で、推定値の事後確率分布p(x|D)と各観測値の尤度p(d|x)とに基づいて、各観測値の確率分布p(d)を算出し、外れ値判定部32で、新たに観測された観測値Dの各観測値dと、各観測値の確率分布p(d)の各々とを観測値の次元毎に比較して、外れ値を判定し、外れ値ではないと判定された観測値を観測プール24へ記憶する。
(もっと読む)
121 - 140 / 2,582
[ Back to top ]