
Fターム[2F129BB36]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 速度センサ (75)
Fターム[2F129BB36]に分類される特許
61 - 75 / 75
ナビゲーション装置の経路探索方法
【課題】 刻々と変わる交通状況の性質を考慮した、精度の高いナビゲーション装置の処理を行う。
【解決手段】
ナビゲーション装置の記憶装置に、統計交通情報(過去に収集された交通情報より定まる旅行時間を含む統計データ)を記憶する。自身が保有する地図データのバージョン情報を交通情報配信センタに送信する。現在の交通情報より定まる旅行時間(移動速度)を含み、かつ地図データのバージョンに適合する現況交通情報を交通情報配信センタから入手する。旅行時間が不明なリンクの旅行時間を算出するために、未提供リンク補間情報も入手する。現況交通情報、未提供リンク補間情報、統計交通情報を用いて、経路探索を行う。経路探索は、イグニションON時に、自動的に行う。
(もっと読む)
位置算出装置の誤差円の決定方法

【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
車載装置
【課題】 演算処理の効率化と低コスト化が実現された車載装置を提供すること。
【解決手段】 車両において、車両挙動状態を検出する車載装置が、自車両の現在位置を検出する位置検出手段と、位置検出手段により検出された自車両現在位置の履歴に基づいて自車両の挙動状態(車速、ヨーレート、又は、加速度)を表す第一の値を算出する算出手段と、自車両の挙動状態を検出し、該挙動状態を表す第二の値を出力する出力手段(車速センサ、ヨーレートセンサ、又は、加速度センサ)と、算出手段により算出された上記第一の値を用いて、出力手段により出力された上記第二の値に対する補正係数を決定する決定手段とを備える。
(もっと読む)
車速検出装置及びナビゲーション装置
【課題】車速パルス信号の1パルス当たりの移動距離の如何に関わらずに、チャタリングの除去とパルスの計数を適正に行うことのできる「車速検出装置及びナビゲーション装置」を提供する。
【解決手段】車速変換部13は、車速パルスの単位時間当たりのパルス数に、距離変換係数を乗じて車速を算出する。制御部109は、車速変換部13が算出した車速とGPS受信機103が測定した車速に応じて、距離変換係数の大きさを定める距離補正係数の適正値を推定し、推定した適正値に距離補正係数を更新する処理を繰り返し行う。また、制御部109は、距離補正係数を更新したならば、マスク時間を、距離変換係数が大きいほど大きくなるように設定する。そして、チャタリング除去部14は、車速パルス信号のマスク時間内の信号レベル変化をマスクすることにより、車速パルス信号に生じるチャタリングを除去し、車速変換部13に出力する。
(もっと読む)
自己位置標定装置
【課題】道路データのない地域における自車両位置を特定することを可能とした自己位置標定装置を得る。
【解決手段】測位情報を定期的に取得し、自車両位置の観測値を生成する観測値生成手段2と、自車両位置の観測値を入力し、前回時刻に推定した自車両位置の予測値と観測値との差分から単位時間当たりの移動速度推定値を算出する推定速度算出手段3と、自車両の車軸回転数を検出する回転数検出手段4と、観測値の生成タイミングごとに、回転数検出手段で検出された車軸回転数に基づいて移動速度実測値を算出する実測速度算出手段5と、移動速度推定値と移動速度実測値との差分であるドリフト量を算出し、ドリフト量の大きさに応じて自車両位置の観測値を補正して今回時刻の自車両位置の予測値を推定する自車両位置予測手段6とを備える。
(もっと読む)
船舶用自動航法援助システム
【課題】潮流の有無に関わらず、船舶を予定航路に沿って正確に航行させることを可能とする船舶用自動航法援助システムを提供する。
【解決手段】命令半径演算部16は、予定航路データ記憶部12より入力された予定航路データと、GPS航法装置14より取得した対地速度・方位情報と、ジャイロ装置20より取得した対水方位及び船速測定器22より取得した対水速度(対水速度・方位情報)とから潮流速度・方位情報を算出し、オートパイロット装置18は、命令半径演算部16より入力された前記潮流速度・方位情報と、取得した前記対水速度・方位情報とに基づいて舵角量を算出し、算出した前記舵角量を舵器24に出力する。これにより、舵器24は、入力された前記舵角量に基づいて船舶を所定方位に旋回させ、この結果、該船舶を予定航路に沿って正確に航行させることができる。
(もっと読む)
車両間通信システム
【課題】 自車両が検出できなかった移動体の存在を運転者に知らせることが可能な車両間通信システムを提供する。
【解決手段】 車両同士が通信を行う車両間通信システムであって、車両ごとに設けられた、当該車両の周囲を撮像するカメラ11,11と、カメラ11,11によって撮像された画像から移動体を検出する対象物検出部32と、車両ごとに設けられた、音声を発するスピーカ21と、車両ごとに設けられた、当該車両のスピーカに発音させる音声に関する音声データを生成する音声データ生成部41dと、車両ごとに設けられた、データの送受信を行う送受信機19と、を備え、一の車両の音声データ生成部41dは、他の車両の対象物検出部32によって検出された移動体の存在を知らせる音声データを生成し、スピーカ21に出力する。
(もっと読む)
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
(もっと読む)
ナビゲーション装置およびプログラム
【課題】複数車線を有する道路に合流ランプが合流した後の近傍に、当該道路から当該合流ランプと同じ側へ分岐する退出ランプがあるような道路構造についての誘導経路計算を、合流ランプから進入する他車両との交錯の危険性を勘案したものとする。
【解決手段】車両用ナビゲーション装置は、(A)算出した暫定誘導経路に道路本線から退出ランプに出る経路が含まれ(120)、かつ(B)当該退出ランプへの出口から暫定誘導経路を遡って所定距離β内に、当該本線に合流する合流ランプが存在し(130)、かつ(C)当該合流ランプと退出ランプが本線の同じ側に付いており(135)、かつ(D)当該暫定誘導経路が本線と合流ランプとの合流点に本線から進入している(140)とき、本線から退出ランプに退出するリンクのコストを正数αだけ増加させ(145)、その新たなコストを用いて再度誘導経路を算出する(160)。
(もっと読む)
地図表示制御装置および地図表示制御制御プログラム。
【課題】地図データの示す地図に現在位置マークを重ねた画像を画像表示装置に表示させるような装置が、現在位置測定精度に比して地図精度が悪い場合に、現在位置における地図データの誤差を適正に補正することができるような新規な技術を提供する。
【解決手段】 車両用ナビゲーション装置は、経路案内処理中に、目的地までの基準距離以下となり(ステップ110)、かつRTK−GPSによる高精度現在位置測定が行われている場合は(ステップ120)、自車両が曲がり角に進入して曲折する度に(ステップ125)、その曲折した位置と地図上の曲がり角との位置との間に基準範囲内の誤差があることに基づいて(ステップ130、135)、曲折位置座標と地図データ中の曲がり角の位置座標との誤差ゼロにするように、地図表示のための表示基準点をずらす(ステップ140)。
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
ナビゲーション装置
【課題】 ドライバ毎に設定を切り替えるナビゲーション装置において、ナビゲーション装置がドライバを特定するための手続きを簡略化する。
【解決手段】 車両用ナビゲーション装置が、ハンズフリー機能付き携帯電話とBluetoothによるハンズフリー機能のための無線接続が確立したとき(ステップ215、220)、接続対象の携帯電話機が携帯電話機−設定対応データに登録済みのものであれば(ステップ225)、携帯電話機−設定対応データにおいて当該携帯電話機の識別データに対応するユーザ名称と実際のドライバが合致しているか否かを音声対話でユーザに確認し(ステップ230、235)合致していれば、携帯電話機−設定対応データにおいてその携帯電話機に対応する個別設定データに従って、ハンズフリー機能のために接続した携帯電話機に対応する個別設定を実現する。
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
ナビゲーション装置
誤差数cmの範囲で移動体の現在位置を示すことができるナビゲーションシステムを提供する。 ナビゲーション装置100は、車両等の移動体に備えられたカメラにより得られる現実の映像に基づき、当該移動体から観察される範囲における映像的な特徴点の三次元座標を含む所定の三次元情報を予め生成する特徴点三次元地図生成装置110と、その所定の三次元情報を記録した記録媒体120と、移動体に備えられたカメラにより得られる現実の映像を、記録媒体120に記録された所定の三次元情報と比較し、現実の映像と一致する三次元座標上の地点と方向を求め、移動体に備えられたカメラの三次元座標上の位置,速度,加速度,視点方向,3軸回転姿勢,3軸回転速度,3軸回転加速度等の所定項目を出力,表示する地点検索ナビゲーション装置130とを備えている。 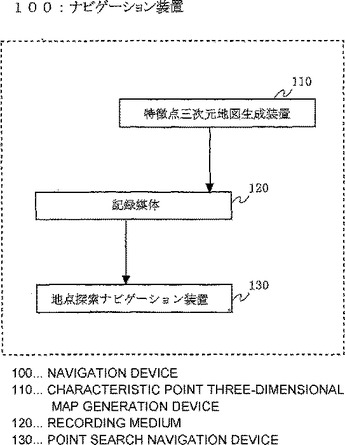 (もっと読む)
(もっと読む)
61 - 75 / 75
[ Back to top ]