
Fターム[2F129BB36]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 速度センサ (75)
Fターム[2F129BB36]に分類される特許
1 - 20 / 75
車載信号処理装置および信号処理方法
【課題】車速センサが出力する車速パルスから車速や走行距離を計算する際に用いる係数を、車両上における電波の受信状態が悪い状況であっても直ちに決定可能にする。
【解決手段】車速パルス信号に基づき車速又は走行距離を算出する情報処理部110と、パルス信号の特性を表す速度パルス係数の情報を保持する不揮発性記憶部120と、車両に搭載されるオドメータが表示しているオドメータ数値の入力を受け付けるオドメータ数値入力部113と、互いに異なる2つの地点のそれぞれにおいて入力された2つのオドメータ数値の差分を表す第1の走行距離を算出し、前記2つの地点間の移動に関し入力された前記車速パルス信号と前記速度パルス係数とに基づいて第2の走行距離を算出し、前記第1の走行距離と第2の走行距離とに基づいて前記速度パルス係数を修正する速度パルス係数修正部110とを備える。
(もっと読む)
車載カメラ及び車載カメラシステム

【課題】車速センサやGPSの精度が低いと予測される状況であっても、自車の位置及び車速を精度良く検知可能である車載カメラを提供することである。
【解決手段】自車両の前方または後方の画像を取得する画像撮像装置と、画像から特徴点を抽出する画像認識部と、検出された自車の車速情報及び現在位置情報の精度を判定する車速判定部と、特徴点と過去に抽出された過去特徴点との間の距離を測定する特徴点間距離測定部と、特徴点と予め記録装置に登録された登録特徴点に基づいて、自車位置を補正する自車位置補正部と、特徴点間距離測定部で測定された距離と、距離間を通過する時間と、に基づいて車速を測定し、補正する車速補正部と、を有する。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
(もっと読む)
速度検出装置及び方法
【課題】移動体の速度を自律航法手段により高精度に検出することのできる速度検出装置及び方法を提供する。
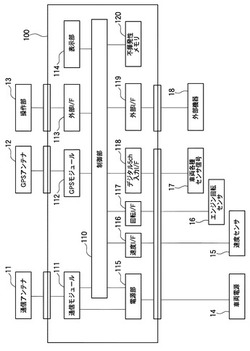
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
(もっと読む)
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
(もっと読む)
補正装置、補正方法及び補正装置用プログラム
【課題】例えば測位電波が受信できない状態において、道路の状態に応じて例えば加速度センサ等のセンサの機能に誤差が生じる場合でも、正確に当該誤差を補正することが可能な補正装置を提供する。
【解決手段】車両に印加されている加速度を検出し、加速度データを生成する加速度センサ1と、加速度データを用いて速度を算出する速度算出部2と、現在位置を検出する位置検出部3と、現在位置に対応する道路の半径データを取得する取得部4と、進行方位を検出するジャイロセンサ5と、進行方位の変化量を算出する変化量算出部6と、道路データと進行方位の変化量とを用いて補正用速度を算出する補正用速度算出部7と、補正用速度を用いて速度算出部2を補正する補正部8と、を備える。
(もっと読む)
地図表示装置および地図更新システム
【課題】ユーザに操作の繰り返しを要求することなく、更新情報を取得することができる。
【解決手段】 記憶手段内の地図情報よりも新しい更新地図情報の提供を要求するための更新要求信号を生成する生成手段と、前記地図情報の更新の要求を受け付けると、前記地図情報の更新が可能であるか否かを判定する判定手段と、前記地図情報の更新が不可であると判定した場合、前記更新の要求を受け付けた前記地図上の特定エリアを示すエリア情報を前記記憶手段に登録する登録手段と、を備え、前記生成手段は、前記記憶手段に前記エリア情報が登録されている場合、前記更新要求信号を生成する。
(もっと読む)
地図表示装置
【課題】ユーザは、周辺にある駅に関する情報を常に把握することができる。
【解決手段】 地図表示装置は、地図情報を記憶する記憶手段と、表示領域に前記地図情報を表示する表示手段と、前記表示領域の範囲外にある駅を特定する駅特定手段と、を備える。また、前記表示手段は、特定された駅に関する情報を前記地図情報と共に前記表示領域に表示する。
(もっと読む)
運転支援装置
【課題】GPSモジュールから得られる情報に基づく自車両の位置等の検出精度を判定し、かつ当該判定の精度を高める。
【解決手段】GPSモジュール3により検出される自車両1の走行速度と車速検出部13により車速パルスに基づいて検出される自車両1の走行速度との速度差に基づいて、GPSモジュール3により検出される自車両1の位置、進行方位および走行速度の有効性を判定する。さらに、自車両1の加速度に基づいて上記速度差を補正することにより、車速検出部13の応答性とGPSモジュール3の応答性との相違によって上記速度差が過大となることを抑制し、GPSモジュール3により検出される自車両1の位置等の有効性の判定精度を高める。
(もっと読む)
端末装置、地図表示変更方法、およびプログラム
【課題】従来の端末装置においては、装置本体の位置(緯度・経度)に合せて、地図をスクロールさせたり、装置本体の移動方向に合せて、地図を回転させたりするのみであった。
【解決手段】地図情報を格納し得る地図情報格納部と、移動体の走行に関する条件である走行条件を格納し得る走行条件格納部と、地図情報の出力指示を受け付ける受付部と、地図情報を出力する出力部と、移動体の走行に関する情報である走行情報を取得する走行情報取得部と、走行情報が走行条件に合致するか否かを判断する判断部と、出力部が出力している地図情報を、走行条件に対応するように変更するように指示する制御部とを具備し、出力部は、制御部の指示に従って、出力している地図情報の出力を変更する端末装置により、装置本体が備えられる移動体の走行に応じて、地図の表示を変更することができる。
(もっと読む)
移動体位置測定装置
【課題】車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供する。
【解決手段】本移動体位置測定装置の特徴検出部20は、実画像の領域から、道路領域(A)、路側領域(B)、及び他領域(C)を分割により検出し、当該A,B,Cを含む情報を出力する処理を行う領域分割部21と、実画像の領域から、直線や角点を含む特徴部群を抽出して特徴情報を出力する処理を行う特徴抽出部22と、実画像における道路領域(A)または路側領域(B)の少なくとも一方から、測位計算で用いないようにするための不要物に対応する特徴部を検出して除去し、当該除去後の特徴情報を出力する処理を行う不要物除去部23と、を有する。
(もっと読む)
道路情報学習装置
【課題】 道路情報の学習を効率よく確実に行うことを可能とした道路情報学習装置を提供する。
【解決手段】 学習する道路情報を選択し(ステップS1)、走行状態に応じた道路情報の算出精度を定め、指標化する(ステップS2)。指標に基づいて評価関数を求め(ステップS4)、それに基づいて道路情報推定に適した走行計画を生成する(ステップS4)。走行計画にしたがった走行時の走行情報を取得し(ステップS5)、道路情報を推定して、学習し(ステップS6)、地図情報データベース3にデータを格納する(ステップS7)。
(もっと読む)
車載用表示装置
【課題】 フロントカメラ起動登録地点として登録が必要な地点をピックアップし、ユーザへ提示することができる表示装置を提供する。
【解決手段】 制御手段は、現在位置に基づき、逐次第1の地点から第2の地点に至る走行軌跡を生成し、生成した該走行軌跡を走行軌跡記憶手段に記憶し、走行軌跡記憶手段に記憶された走行軌跡に基づいて、当該走行軌跡上で所定の条件を満たした地点を登録地点候補として表示手段に表示し、表示手段に表示された登録地点候補の中から選択された地点を登録地点として登録地点記憶手段に記憶し、現在位置が前記登録地点に到達したときに前記映像を前記表示手段に表示する制御を行う。
(もっと読む)
位置履歴管理装置、位置履歴管理システム、サーバ装置、位置履歴管理方法、および、プログラム
【課題】時系列において前の位置情報の履歴に基づいて補正する場合に比べて精度の高い補正必要性の判断を行うことができる、位置履歴管理装置、位置履歴管理システム、サーバ装置、位置履歴管理方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、位置情報を時系列に記憶し、道路網を規定する道路ネットワークデータを記憶し、位置情報に対応する道路ネットワークデータをマッチングにより特定し、対象とする位置情報について特定した道路ネットワークデータと、当該対象とする位置情報から時系列的に後または前後の位置情報について特定した道路ネットワークデータとを比較して、当該位置情報間の接続性を判定し、判定した接続性の判定結果に基づいて、対象とする位置情報の補正が必要か否かを判定する。
(もっと読む)
位置情報取得システム及びプログラム
【課題】車両の正確な位置情報を提供することが可能な位置情報取得システム及びプログラムを提供する。
【解決手段】車両用警報装置10には、車両のシガーソケットに接続されたシガープラグコードを接続するためのDCジャック21が設けられている。前記シガープラグコードをDCジャック21に接続することにより、車両用警報装置10は車両から電源供給を受けて動作を行うことができる。車両には、直流の電源とこれを充電するオルタネータが設けられており、走行時における電源からの電圧には、オルタネータノイズが重畳される。制御部は、オルタネータノイズを検出するノイズ検出部を備えており、車両から電源供給を受けて動作を行う場合、オルタネータノイズから車両のエンジン回転数を導出する。そして、GPS測位不可能となった場合には、エンジン回転数に基づいて車両の速度を導出し、車両の位置情報を表示する。
(もっと読む)
車載地図表示装置
【課題】環状交差点の先に繋がっている道路の様子を容易に把握できる地図を表示する。
【解決手段】ナビゲーション装置は、環状交差点に自車両が進入すると、その環状交差点に接続されている道路のうち自車両の直前に接続されている道路を地図データにおいて選択し、当該環状交差点と選択した道路との位置関係に基づいてオフセット方向を決定し、決定したオフセット方向に基づいて、当該環状交差点と選択した道路との接続点を少なくとも含む地図範囲を決定する。こうして決定した地図範囲を有する接続道路地図40を表示する。
(もっと読む)
運転支援装置
【課題】車両運転の安全性向上を図りつつ、運転者の運転技量の向上を促すことのできる運転支援装置を提供する。
【解決手段】本発明は、運転者による車両の運転操作を支援する運転支援装置1であって、車両の走行状況を検出する走行状況検出部13と、走行状況検出部13の検出した走行状況に基づいて、車両の操作許容範囲を算出する操作許容範囲算出部16と、運転者の運転操作量Dが操作許容範囲Aから逸脱した逸脱操作量であるか否かを判断する逸脱判断部17と、逸脱判断部17が運転者の運転操作量Dは逸脱操作量であると判断した場合、操作許容範囲A内で当該逸脱操作量に最も近い操作量である範囲限界操作量に基づいて車両を制御する車両制御部18と、を備える。
(もっと読む)
基準パターン情報生成装置、方法、プログラムおよび一般車両位置特定装置
【課題】車両の揺動によって車載カメラの視野方向が変化した場合であっても車両の位置を特定可能な技術の提供。
【解決手段】基準車両の周囲の地物を撮影した撮影画像から前記地物の像に含まれる複数の基準画像特徴点を抽出して前記撮影画像上での位置を示す座標値を取得し、前記地物を撮影した時点での前記基準車両の位置を基準位置として取得し、前記基準画像特徴点の前記座標値と前記基準位置とを対応づけて基準パターン情報として所定の記録媒体に記録し、前記基準パターン情報を所定の記録媒体に記録する際には、前記基準車両の揺動に応じた特定の座標成分の前記座標値の変化が複数の前記基準画像特徴点において所定量以下となる場合、前記特定の座標成分の前記座標値である基準座標値を前記基準画像特徴点の前記座標値とする。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
1 - 20 / 75
[ Back to top ]