
Fターム[2F129BB37]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 方位センサ (111)
Fターム[2F129BB37]に分類される特許
1 - 20 / 111
状態推定装置
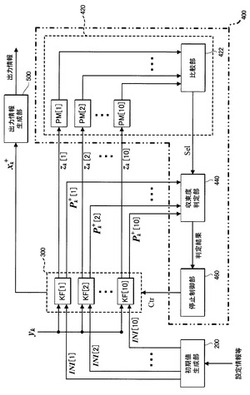
【課題】高速且つ処理負荷の小さな非線形カルマンフィルタの演算を実現する。
【解決手段】状態推定装置は、3次元磁気センサ70を含む複数のセンサと、システムの状態を表す複数の状態変数を要素とする状態ベクトルxk及び複数のセンサからの出力値を要素とする観測値ベクトルykを用いて状態ベクトルxkを更新することによりシステムの状態を推定する複数のカルマンフィルタKFと、互いに異なる複数の初期ベクトルINIを生成し、状態ベクトルxkの初期値として複数のカルマンフィルタKFの各々に供給する初期値生成部200と、複数のカルマンフィルタKFの推定精度を各々評価することで、推定精度が最も高いカルマンフィルタを特定し、特定したカルマンフィルタKFを除く他のカルマンフィルタKFの動作を停止させるカルマンフィルタ制御部400とを備える。
(もっと読む)
方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラム

【課題】少ない処理量で方位センサの補正を行うことができる方位補正システム、端末装置、サーバ装置、方位補正方法及びプログラムを提供する。
【解決手段】方位補正システム100は、道路を含む景観の撮影画像を取得する撮影手段101、前記撮影画像の撮影方位を検知する方位検知手段102、前記撮影画像の撮影位置を検知する位置検知手段103、道路の配置状況を含む地図情報を記憶する地図記憶手段104、及び誤差検出手段105を備える。誤差検出手段105は、前記撮影画像と前記撮影方位とに基づいて特定される前記撮影画像上の道路の配置方向と、前記地図情報と前記撮影位置とに基づいて特定される前記撮影位置における前記地図上の道路の配置方向とを比較し、前記方位検知手段の誤差を算出する。
(もっと読む)
進行方向判定装置、進行方向判定方法および進行方向判定プログラム
【課題】移動体の進行方向を精度良く判定すること。
【解決手段】進行方向判定装置100は、測位点選択部140bが、測位点Qa、Qb、Qc、Qdを選択する。測位点Qaと測位点Qbとの距離は、探索距離Th2以上とする。また、測位点Qaと測位点Qdとの距離は、探索距離Th2以上とする。また、測位点Qdと測位点Qcとの距離は、探索距離Th4以上とする。角度算出部140cは、測位点QaとQbを通る直線と、測位点Qcと測位点Qdを通る直線との角度を算出し、進行方向判定部140dは、角度に基づいて、進行方向を判定する。
(もっと読む)
方位情報取得方法
【課題】GPS衛星より送信される信号によりGPS受信機により方位情報を取得する方法に関して装置の使用文脈に適した廉価で効率的な方法で回折波の影響を弱化して正確な情報を得ることを可能にする。
【解決手段】体躯を用いて上空半天球の片側に存在するGPS衛星からの衛星信号の遮蔽を行うと同時に、体躯に沿い大地に垂直に設置されたGPS受信機に
他方の片側に存在するGPS衛星の衛星信号の探索を行わせつつ、捕捉した衛星信号を用いて方位を限定的に得る過程において、遮蔽物としての体躯の両脇からの回折波については、中空構造の容器中に充填された水又はそれに近い誘電損係数を備える物質を、前記GPS受信機の周囲に配備することで、廉価なGPS受信機を流用しているため影響を与えようとする回折波の弱化を効率的かつ必然性を有して所持している物質の有効活用を図りつつ実現し、GPS受信機が回折波の影響を排除し方位限定する事を助ける。
(もっと読む)
携帯型電子デバイスのための、磁場センサおよび加速度計を使用して姿勢および角速度を検知するシステムおよび方法
【課題】動的な物体の姿勢および角速度を含んだ動き情報を決定するシステムである。
【解決手段】3つの略直交する方向における磁場の強度および/または方向を、本体基準座標系において測定するための磁場検知デバイス71と、物体の全加速度を本体基準座標系において測定するために適合されている加速度検知デバイス72と、フィルタにおいて、全加速度の測定データおよび磁場の測定データと運動力学的モデルとを組み合わせることによって、姿勢および角速度を算出するために適合されているプロセッサ75とを備えている。
(もっと読む)
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
(もっと読む)
携帯端末、位置検出方法、プログラム
【課題】携帯端末の周囲の金属物の有無を考慮して位置検出動作を行う。
【解決手段】携帯端末は、地磁気を検出する地磁気検出部12と、位置を検出する位置検出部11と、前記地磁気検出部12の検出状態を判定する判定部13と、前記判定部13の判定結果に基づいて、前記位置検出部11の位置検出動作を切り替える制御部14と、を有する。前記制御部14は、前記地磁気検出部12の検出状態が有効または無効のいずれであるかに基づいて、該位置検出動作を開始してから停止するまでの時間であるタイムアウト時間を切り替える。
(もっと読む)
進行方位算出装置、進行方位算出方法及び進行方位算出プログラム並びにナビゲーション装置
【課題】進行方位を精度良く算出できるようにする。
【解決手段】本開示の進行方位算出装置は、使用者の歩行に伴い発生する加速度のうち、鉛直方向の加速度を表す鉛直加速度と、水平面内における加速度の方位及び大きさを表す水平加速度とを検出する検出部と、鉛直加速度のゼロクロス点を基に、使用者の2歩に相当する期間を歩行周期として設定する歩行周期設定部と、歩行周期内において、水平加速度の大きさが極小となる位相を基に、使用者の進行方向への加速と減速とが切り替わる加減速切替位相を設定する加減速切替位相設定部と、加減速切替位相毎に区切られた各区間を交互に加速区間又は減速区間として推定する加減速区間推定部と、減速区間では水平加速度が表す方位に基づき、加速区間では水平加速度が表す方位と反対の方位に基づき、使用者の進行方位を決定する進行方位決定部とを設けるようにした。
(もっと読む)
車載装置とその車両方位修正方法
【課題】 本発明の目的は、簡易な方法でより正確に車両方位を特定する技術を提供することにある。
【解決手段】
搭載される車両を基準とする所定の方向を撮影可能な撮影装置を備える車載装置であって、記憶手段と、現在地と車両方位とを特定する車両状態特定手段と、前記車載装置の停止処理において、前記撮影装置を用いて前記車両の周囲を撮影した停止時映像を前記記憶手段に記憶させる停止時映像取得手段と、前記車載装置の起動処理において、前記撮影装置を用いて前記車両の周囲を撮影する起動時映像取得手段と、前記停止時映像に含まれる第一の被写体と、前記起動時映像取得手段により取得された映像に含まれる第二の被写体と、を用いて、前記車両方位を修正する車両方位変更手段と、を備えることを特徴とする。
(もっと読む)
ナビゲーション装置
【課題】周辺の施設情報に含まれる方位誤差情報や過去に通過した際の方位誤差情報に基づいて、正確な方位を認識することができるナビゲーション装置を提供することを目的とする。
【解決手段】現在位置と移動速度と方位を取得しGPS情報検出手段と、前記GPS情報検出手段で検出された現在位置から目的地までの経路を探索する経路探索手段と、前記経路探索手段の探索結果に基づいて経路案内する経路案内手段と、現在位置における外乱磁界を検出する地磁気センサと、施設情報と共に外乱磁界の情報が地図データと共に保存された記憶手段と、前記GPS情報検出手段で検出された方位に対して前記地磁気センサで検出された外乱磁界と前記記憶手段に保存された前記外乱磁界の情報を用いて正確な方位を算出する方位算出手段と、前記方位算出手段で算出された方位を用いて前記GPS情報検出手段で検出された方位を補正する方位補正手段を備える。
(もっと読む)
状態推定装置、電子機器及びプログラム
【課題】 カルマンフィルターの内部状態変数と観測量の補正処理により、推定精度を維持することができる状態推定装置の提供。
【解決手段】 状態推定装置100は、観測信号に基づきシステムの内部状態をカルマンフィルターにより推定する状態推定部180と、観測信号を観測量に変換する信号変換部120と、観測量の補正処理を行う補正部160と、補正部160と状態推定部180を制御する制御部140とを含む。制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行う。補正部160は、補正指示が行われた場合に、観測量の補正処理を行う。状態推定部180は、補正指示が行われた場合に、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づき状態推定を行う。
(もっと読む)
移動端末及び移動経路算出プログラム
【課題】移動経路の算出精度を維持しつつ、消費電力を低減する。
【解決手段】絶対位置検出部30が移動端末100のアンカーポイントを検出し、リンク情報生成部22が、移動端末が曲がるまでの間に移動した線分(リンク)を取得し、移動経路算出部24が、リンク情報生成部22が取得したリンク上を移動端末が移動している間に絶対位置検出部30で検出されたアンカーポイントに基づいて、リンクの角度(所定方向)を算出するとともに、当該リンクの角度と直進距離とから移動端末の移動経路を算出する。そして、移動端末が1つのリンク上を移動している間に、絶対位置検出部においてアンカーポイントが複数検出された場合に、移動経路算出部は、遅いタイミングで検出されたアンカーポイントほどリンクの角度の算出において複数のアンカーポイントそれぞれの重み係数kjを大きくする。
(もっと読む)
端末装置及び地磁気環境判定プログラム
【課題】端末装置及び地磁気環境判定プログラムにおいて、観測地点の周囲の外乱磁気による影響を抑制して自律測位の信頼性の低下を防止可能とすることを目的とする。
【解決手段】互いに直交する3軸方向の地磁気を検出する地磁気検出部と、3軸方向の加速度を検出する加速度検出部と、検出した地磁気及び加速度に基づいて地磁気を表す地磁気ベクトルを鉛直方向に投射した鉛直成分を算出する鉛直成分算出部と、算出した鉛直成分の一定時間内における分散を算出する分散算出部と、前記分散と閾値との比較に基づいて前記地磁気の信頼性を示す地磁気尤度を判定して出力する地磁気尤度判定部を備えるように構成する。
(もっと読む)
車載用表示装置
【課題】 フロントカメラ起動登録地点として登録が必要な地点をピックアップし、ユーザへ提示することができる表示装置を提供する。
【解決手段】 制御手段は、現在位置に基づき、逐次第1の地点から第2の地点に至る走行軌跡を生成し、生成した該走行軌跡を走行軌跡記憶手段に記憶し、走行軌跡記憶手段に記憶された走行軌跡に基づいて、当該走行軌跡上で所定の条件を満たした地点を登録地点候補として表示手段に表示し、表示手段に表示された登録地点候補の中から選択された地点を登録地点として登録地点記憶手段に記憶し、現在位置が前記登録地点に到達したときに前記映像を前記表示手段に表示する制御を行う。
(もっと読む)
道路情報学習装置
【課題】 道路情報の学習を効率よく確実に行うことを可能とした道路情報学習装置を提供する。
【解決手段】 学習する道路情報を選択し(ステップS1)、走行状態に応じた道路情報の算出精度を定め、指標化する(ステップS2)。指標に基づいて評価関数を求め(ステップS4)、それに基づいて道路情報推定に適した走行計画を生成する(ステップS4)。走行計画にしたがった走行時の走行情報を取得し(ステップS5)、道路情報を推定して、学習し(ステップS6)、地図情報データベース3にデータを格納する(ステップS7)。
(もっと読む)
遊脚期の加速度データを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末をズボンのポケットのような衣服に入れている場合であっても、その携帯端末に搭載された加速度センサ及び地磁気センサを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末は、加速度センサと、地磁気センサと、歩行者の進行方向を決定する進行方向決定手段とを有する。進行方向決定手段は、各軸加速度データと、合成加速度とを用いて、遊脚期の加速度データを抽出する遊脚期抽出手段と、遊脚期の加速度データの中から、指定数分の加速度データを取得する指定数分加速度取得手段と、指定数分の遊脚期の加速度データに基づいて、右/左向きベクトルUを算出する右/左向きベクトル算出手段と、右/左向きベクトルUと、重力ベクトルGと、地磁気ベクトルMとを用いて、進行方向を算出する進行方向算出手段とを有する。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】マルチセンサ計測処理ユニット300が付随する加速度計340と、マルチセンサ計測処理ユニット300に接続される外部の幾何学センサ370を備え、マルチセンサ計測処理ユニット300が、加速度計340および幾何学センサ370からのセンサデータに基づいて動きを検出し、加速度計340からの横揺れおよび縦揺れのセンサデータに基づいて幾何学センサ370の傾きを補償する。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】プロセサ120と、プロセサに接続される1以上のセンサ130、140と、プロセサに接続され、外部センサからの計測情報を受信する無線インターフェースユニット110を備え、プロセサは計測情報に基づいて1以上のナビゲーション状態を評価することに用いられるマルチセンサ計測処理ユニット100。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記自立航法軌跡と前記GPS軌跡との一致度を最も高くするための前記自立航法情報の第1補正量を取得し、当該第1補正量より小さい第2補正量によって前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
1 - 20 / 111
[ Back to top ]