
Fターム[2F129BB38]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 角速度センサ (105)
Fターム[2F129BB38]に分類される特許
81 - 100 / 105
位置検出装置、その方法、そのプログラム及びその記録媒体

【課題】
移動体の位置を精度良く求める。
【解決手段】
マップマッチング位置算出部221は、地図情報121における道路上を車両が走行することを想定しつつ、GPS受信ユニット170による測位結果及び走行センサユニットによる検出結果に基づいて、マップマッチング位置を算出する。また、センサ位置算出部222は、走行センサユニットによる検出結果に基づいて、センサ位置を算出する。このセンサ位置は、当該測位結果又はマップマッチング位置の精度が高いと判断される場合には、センサ位置初期化部223により初期化される。こうして適宜初期化が施されるセンサ位置の精度がセンサ位置精度評価部224により高いと評価され、かつ、センサ位置とマップマッチング位置とがある程度以上離れている場合に、マップマッチング位置補正部225が、センサ位置を基準としてマップマッチング位置を補正する。
(もっと読む)
カーナビゲーション装置、自立航法用誤差補正係数算出方法および誤差補正係数算出プログラム

【課題】 長時間自立航法で走行した後に、GPSレシーバを用いることなく自動車の正確な位置、方向および速度を検出することを可能とすること。【解決手段】 自動車の速度および角速度を使用して自立航法に基づいて自動車の座標を推測し、自動車が道路上の第1の位置および第2の位置に到達したかどうかを検知し、自動車が該第1の位置から該第2の位置に移動する間自立航法に基づいて推定された自動車の座標を所定のタイミングで記録し、この記録された座標および予め記憶されている道路の座標に基づいて、自立航法に使用される速度および角速度の誤差を補正する誤差補正係数を演算する。 (もっと読む)
測位装置及び測位方法
【課題】電波航法により絶対位置、絶対速度を得ることができない場合、或いは、電波航法による測位精度が低い場合でも、自律航法における測定誤差を的確に推測する。
【解決手段】電波を受信している衛星の数や配置等に基づいて、電波航法で得られる絶対測位情報が高信頼度であるかを判定し(ステップS2)、高信頼度であるときには、電波航法による絶対測位情報を利用して、自律航法による測位結果の測定誤差を推定する(ステップS4)。電波航法による絶対測位情報が高信頼度でない場合は、捕捉衛星の中から受信パワーや仰角がしきい値よりも大きい高信頼度衛星を選択し(ステップS5)、この高信頼度衛星との間の擬似距離及びドップラ周波数を算出しこれを利用して、自律航法による測位結果の測定誤差を推定する(ステップS6)。そして推定した測定誤差を用いて自律航法による測位結果を補正し、測位装置10本体の測定位置を得る。
(もっと読む)
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部220による探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置が得られると、再ルート探索条件設定部231が、センサデータ処理部210から報告された移動状況情報を検出するセンサの検出結果精度に基づいて、マップマッチング位置の精度が低いと評価できるか否かを判定する。この判定の結果が否定的であった場合には、再ルート探索条件設定部231は、通常の再ルート探索条件である第1再ルート探索条件を設定する。一方、当該判定の結果が肯定的であった場合には、再ルート探索条件設定部231は、第1再ルート探索条件よりも条件満足までに時間がかかる第2再ルート探索条件を設定する。設定された再ルート探索条件が満足されると、再ルート探索が行われる。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】AHRSとINSで構成を共通化し、温度計を使わずジャイロの温度ドリフト誤差を補正し、基準となる姿勢・方位データを使わずジャイロセンサ誤差と加速度計誤差を補正する慣性航法装置。
【解決手段】推定センサ誤差データからジャイロと加速度計の出力を補正するセンサ誤差補正計算部と、補正後の移動体の位置や姿勢を計算し、推定姿勢/方位誤差データより移動体の位置や姿勢を補正する航法・姿勢方位計算部と、補正後の位置や姿勢の情報と移動体上のGPSセンサの絶対位置と絶対速度と比較して、ジャイロにおける温度ドリフトの影響を分離する温度誤差推定部と、分離後の温度ドリフト等の影響よりジャイロと加速度計の出力の誤差を推定しセンサ誤差補正計算部で使用するセンサ誤差データを校正し、補正後の位置や姿勢の出力の誤差を推定し航法・姿勢方位計算部で使用する姿勢/位置誤差データを校正するセンサ固有誤差推定部とを有する。
(もっと読む)
たて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法
【課題】本発明は、地球の自転角速度・重力を利用し、前記ドリルの旋回により生じる方位角誤差を除去し、抗掘削の方位精度を向上させることを目的とする。
【解決手段】本発明によるたて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法は、方位検出部(20)が検出する地球の自転角速度・重力を利用し、ドリル(2)の旋回により生じる方位角誤差を除去する構成と方法である。
(もっと読む)
移動体のセンサ補正装置、停止判定装置およびその方法
【課題】従来の速度センサを用いて、移動体が停止していることを判定し、停止判定をしている間に閾値を用いて、自立センサのバイアスやドリフト等の誤差を補正する方法では、センサの個体差から適切な閾値を設定することが難しい。
【解決手段】移動体の加速度を検出する加速度センサ11と、加速度センサ11のデータ系列のランダム性を判定する独立性判定手段12と、移動体が走行している路面の傾斜角を算出する傾斜角演算手段13と、加速度センサの補正値を格納する記憶媒体14と、加速度センサの補正値を算出する加速度センサの補正値演算手段15とを備え、移動体の走行状況を正確に判定し、路面の傾斜角を算出することで、閾値を用いなくともセンサを補正することが可能となる。
(もっと読む)
カーナビゲーション装置
【課題】カーナビゲーション装置において、経由地或いは目的地へ行く意味を失ったような場合、その経由地或いは目的地を案内経由から消去する。
【解決手段】案内経路に沿って走行中に、例えば用を済ませるために途中で立ち寄った施設があると、その立ち寄り施設が経由地または目的地として設定された施設と同じカテゴリーに属する施設であるか否かを判断し、同じカテゴリーであった場合、その経由地または目的地を案内経路の経由地または目的地から削除する。
(もっと読む)
移動体の水平走行判定装置及び方法
【課題】移動体が走行している路面の状態を正確に判定することのできる移動体の水平走行判定装置を提供する。
【解決手段】移動体に搭載される機器の取付け角度を算出及び検証することにより、移動体が走行している路面の状態を判定することが可能となる。具体的には、移動体が直進している場合に加速度センサ12で検出される値から筐体が取付けられている角度の候補を算出する。そして、ある程度のデータ量の取付け角度の候補を蓄積させ、正規性の検定を行うことにより、取付け角度の範囲を設定する。次に、角速度センサ10で検出される値から筐体が取付けられている角度の候補を算出し、その値が設定した範囲内にある程度のデータ量蓄積されたとき設定した取付け角度の信頼性は高く、その後に算出した取付け角度の候補から移動体が走行している路面の状況を判定することができる。
(もっと読む)
車両の走行状態検出装置、ナビゲーション装置、及びプログラム
【課題】加速度センサや角速度センサを用いて車両の走行状態を検出する装置において、センサからの検出信号に車両の上下振動による振動ノイズが重畳されたときに、その旨を速やかに検出して検出信号から振動ノイズを除去できるようにする。
【解決手段】加速度センサ及び角速度センサを備えたナビゲーション装置において、これら各センサからの検出信号は、ノイズ除去用のフィルタリング処理を行う前に振動ノイズ除去処理を行う。この処理では、各センサからの検出信号を周期的にサンプリングし(S120、S130)、過去n回分のサンプリングデータの最大値と最小値との差Da、Dbを求め(S150、S180)、その差が共に判定値Ta、Tbを越えると、各検出信号に車両の上下振動による振動ノイズが重畳されていると判断して、各サンプリングデータから振動ノイズ成分を除去する(200,210)。
(もっと読む)
車両の挙動制御装置
【課題】 走行中と停車時にそれぞれヨーレートセンサのゼロ点補正を可能とした車両の挙動制御装置において、適切なゼロ点補正を行うことを可能とした車両の挙動制御装置を提供する。
【解決手段】 車両走行中で走行中のヨーレート補正値(YR0)演算条件が成立した場合には、走行中ヨーレート補正値YR0Mを求め(ステップS11、12)、停止中に停止中のヨーレート補正値(YR0)演算条件が成立した場合には、停止中ヨーレート補正値YR0Sを求める(ステップS15、17)。直近のYR0M補正時点からの経過時間を示すカウンタ値CTが所定のしきい値Thxを越えている場合には、YR0MをYR0Sで置き換える(ステップS18、19)。そして、YR0MとYR0Sとの差の絶対値Ydiffがしきい値Aを越えている場合には、車両挙動制御(ステップS26)の制御しきい値をかさ上げする(ステップS23、24)。
(もっと読む)
位置評定装置、位置評定方法および位置評定プログラム
【課題】 都市部などGPSの衛星補足数が十分確保できない条件下でも測位精度の劣化を防ぐことを目的とする。
【解決手段】 天空画像カメラ部110が撮影して撮像データを生成し、天空画像変換部120が撮像データを仰角・方位角面に投影する。また、DSM取得部140が各地点において天空画像カメラ部110が撮影するであろう範囲の地理データをDSMデータベース190から取得し、DSM変換部150が地理データを仰角・方位角面に投影する。そして、位置・姿勢推定部160が仰角・方位角面に投影した撮像データと各地点における地理データとを比較し、地理データが撮像データと一致する地点を天空画像カメラ部110の撮影時の位置評定装置100の位置とする。
(もっと読む)
車載装置
【課題】 演算処理の効率化と低コスト化が実現された車載装置を提供すること。
【解決手段】 車両において、車両挙動状態を検出する車載装置が、自車両の現在位置を検出する位置検出手段と、位置検出手段により検出された自車両現在位置の履歴に基づいて自車両の挙動状態(車速、ヨーレート、又は、加速度)を表す第一の値を算出する算出手段と、自車両の挙動状態を検出し、該挙動状態を表す第二の値を出力する出力手段(車速センサ、ヨーレートセンサ、又は、加速度センサ)と、算出手段により算出された上記第一の値を用いて、出力手段により出力された上記第二の値に対する補正係数を決定する決定手段とを備える。
(もっと読む)
角速度センサの零点補正装置および補正方法
ロボット等の運動体に角速度センサ(10)が設けられる。第1設定器(14)は角速度の変化幅が所定幅以下であるか否かで静止状態を判定し、静止判定器(20)は判定時間を超えて静止状態が継続しているか否かを判定する。総和平均器(34)は、静止状態と判定された期間のn個のデータのうち、終了タイミング直前のi個のデータを除いた(n−i)個のデータの総和平均を算出して零点オフセットとする。零点補正器(36)は、出力値を零点補正して出力器28に出力する。 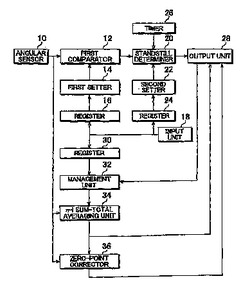 (もっと読む)
(もっと読む)
車両挙動制御装置
【課題】ヨーレートセンサのゼロ補正ずれによる不適切な挙動制御を防止しつつ、ヨーレートセンサのゼロ補正出力が得られない場合でも適切な挙動制御が行える車両挙動制御装置を提供すること。
【解決手段】ヨーレートセンサ5を用いて車両の挙動制御を行う車両挙動制御装置であって、車両の停止中にヨーレートセンサ5のゼロ点出力を演算し(S30)、車両の走行中にヨーレートセンサ5のゼロ点出力を演算し(S26)、停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超える場合には停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超えない場合に比べて挙動制御開始しきい値を高く設定する(S48)。これにより、ヨーレートセンサ5のゼロ点補正が適切に行われていないおそれのある場合には、挙動制御開始しきい値が高く設定され挙動制御に入りにくくなり、不適切に挙動制御が行われることを防止できる。
(もっと読む)
航法装置における連続的、不連続的慣性計器測定値の積分装置と方法
二種の慣性航法機器(12、14)の出力が、連続的に航法を提供する間、精度改善のため組み合わされる。本発明は光原子機器出力の性質を利用して、光原子機器(12)の「休止時間」中の従来型慣性センサーのドリフトの影響を和らげる一方、加速度と角速度情報の直接抽出を強いることなく高められた航行能力を提供する。 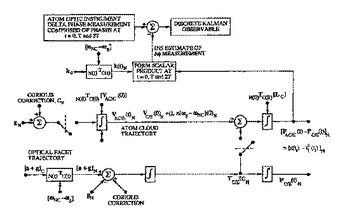 (もっと読む)
(もっと読む)
船舶用自動航法援助システム
【課題】潮流の有無に関わらず、船舶を予定航路に沿って正確に航行させることを可能とする船舶用自動航法援助システムを提供する。
【解決手段】命令半径演算部16は、予定航路データ記憶部12より入力された予定航路データと、GPS航法装置14より取得した対地速度・方位情報と、ジャイロ装置20より取得した対水方位及び船速測定器22より取得した対水速度(対水速度・方位情報)とから潮流速度・方位情報を算出し、オートパイロット装置18は、命令半径演算部16より入力された前記潮流速度・方位情報と、取得した前記対水速度・方位情報とに基づいて舵角量を算出し、算出した前記舵角量を舵器24に出力する。これにより、舵器24は、入力された前記舵角量に基づいて船舶を所定方位に旋回させ、この結果、該船舶を予定航路に沿って正確に航行させることができる。
(もっと読む)
補正値記憶装置および補正装置
【課題】補正値の精度を高めることができる補正値記憶装置を提供すること。
【解決手段】温度センサ13およびジャイロセンサ14とバッテリ15との間には、バッテリ15に対してイグニションスイッチ10を介さずに接続される端子16が設けられている。すなわち、温度センサ13およびジャイロセンサ14とバッテリ15とは、端子16を通る回路およびイグニションスイッチ10に接続された端子17を通る回路の2系統で接続可能である。そして、温度センサ13およびジャイロセンサ14と端子16および端子17との間には、温度センサ13およびジャイロセンサ14を端子16および端子17の何れに接続するかを切り換えるスイッチ18が設けられている。出力IF6には、CPU4からの命令に応じてスイッチ18に接続を切り換えさせるスイッチ制御回路20が接続されている。
(もっと読む)
傾斜角算出装置及びナビゲーション装置
【課題】 車両自体の傾斜角を求めて、道路のみの傾斜角を正確に算出可能とする。
【解決手段】 ナビゲーション装置1は、車両の前後に取り付けるステレオカメラ10、11を具備し、水平的な姿勢における各ステレオカメラ10、11による算出距離に対応した基準距離D1、D2及び各ステレオカメラ10、11のレンズ中心間の水平距離を記憶部9に予め記憶している。各ステレオカメラ10、11が撮像した画像情報に基づき画像演算処理部8は地面までの距離を求め、求めた距離と基準距離との差及びレンズ中心間の水平距離等より三角関数を用いて車両自体の傾斜角(車両傾斜角)を算出する。算出した車両傾斜角で3Dジャイロセンサー5の検出結果より求めた傾斜角を補正して道路のみの傾斜角を得る。
(もっと読む)
ナビゲーション装置
【課題】 自律航法で位置検出する場合の測位誤差を低減することができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置には、車両の方位変化量および移動距離を検出する自律航法センサ5と、検出された方位変化量および移動距離を累積して車両位置を計算する車両位置計算部20と、車両が特定施設へ進入したことを検出する進入検出部7と、特定施設に進入したことが検出された後の車両の走行軌跡を記録する走行軌跡記録部24と、記録された走行軌跡に基づいて同一の走行軌跡上を車両が繰り返し走行しているか否かを判定する同一軌跡走行判定部26と、同一の走行軌跡を繰り返し走行していると判定されたときに、2周目以降の走行軌跡に対応して車両位置計算部20によって計算される車両位置を1周目の走行軌跡に合わせて補正する車両位置補正部22とを備えている。
(もっと読む)
81 - 100 / 105
[ Back to top ]