
Fターム[2F129BB38]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 角速度センサ (105)
Fターム[2F129BB38]に分類される特許
101 - 105 / 105
ナビゲーション装置
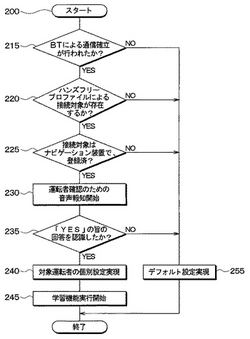
【課題】 ドライバ毎に設定を切り替えるナビゲーション装置において、ナビゲーション装置がドライバを特定するための手続きを簡略化する。
【解決手段】 車両用ナビゲーション装置が、ハンズフリー機能付き携帯電話とBluetoothによるハンズフリー機能のための無線接続が確立したとき(ステップ215、220)、接続対象の携帯電話機が携帯電話機−設定対応データに登録済みのものであれば(ステップ225)、携帯電話機−設定対応データにおいて当該携帯電話機の識別データに対応するユーザ名称と実際のドライバが合致しているか否かを音声対話でユーザに確認し(ステップ230、235)合致していれば、携帯電話機−設定対応データにおいてその携帯電話機に対応する個別設定データに従って、ハンズフリー機能のために接続した携帯電話機に対応する個別設定を実現する。
(もっと読む)
車載用ナビゲーション装置

【課題】車両位置マークの表示の有無にかかわらず誘導経路上での車両の進行方向を容易に判断できるようにすることができる「車載用ナビゲーション装置」を提供する。
【解決手段】車載用ナビゲーション装置は、画面上で案内情報を提供する表示手段と、地図データ及び各種施設に関する情報を格納したメモリ手段と、前記表示手段及びメモリ手段に動作可能に接続された制御手段とを有する。
前記制御手段は、前記表示手段の画面上で目的地までの誘導経路33の案内を行っている状態で、当該誘導経路33に有料道路が含まれているときに、前記メモリ手段から当該誘導経路に含まれる有料道路に付帯する施設の情報(35、36、40〜42)を取得し、当該取得した施設の情報を、前記誘導経路上で車両の進行方向の左側に位置するように前記表示手段の画面上に表示させる。
(もっと読む)
地理的軌道の軌跡を割り出すための方法
所定の出発位置と所定の終点位置とを有する地理的軌道の軌跡を割り出すための方法は、装置の移動の間に物理的測定データをサンプルとして収集する車載同期センサ一式を備えているデータ収集装置を、前記出発位置から前記終点位置まで移動させるステップと、収集した測定データにもとづき、方位プロファイル、ピッチ・プロファイル、距離プロファイルおよびロール・プロファイルを割り出すステップと、前記方位プロファイル、前記ピッチ・プロファイル、前記距離プロファイルおよび前記ロール・プロファイルにもとづいて前記軌跡を割り出すステップとを有している。出発位置から終点位置までの装置の移動の間、前記物理的測定データのすべてが記憶される。記憶された測定データの取り出し後でかつ前記プロファイルの割り出しの前に、この方法は、前記一式のうちの第1および第2のセンサの測定データにそれぞれもとづいて、第1および第2の軌道パラメータをそれぞれ割り出し、第1の軌道パラメータを第2のパラメータにマッピングするステップと、該マッピングにもとづいて、第1および第2のセンサの測定データの誤差補償を決定するステップと、誤差補償によって第1および第2のセンサの測定データを補正するステップをさらに有している。 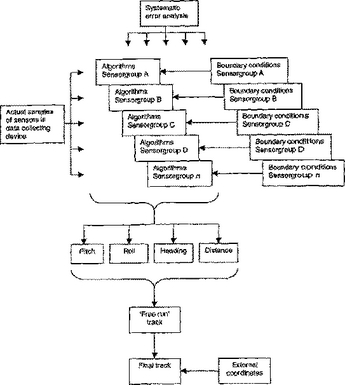 (もっと読む)
(もっと読む)
複数のナビゲーションコンポーネントの整合システム及び方法
一例示のナビゲーションシステムが、移動体(105)の第1のロケーションにおけるマスタナビゲーションコンポーネント(110)と、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネント(115)とを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器が、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブの補正されたナビゲーション測定データを変換する。一例示のナビゲーションシステムは、移動体の第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントは、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器は、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換する。 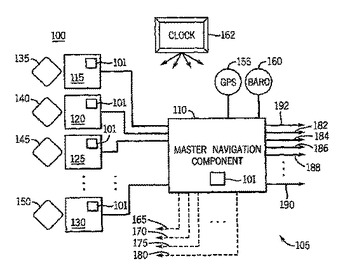 (もっと読む)
(もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
101 - 105 / 105
[ Back to top ]