
Fターム[2F129BB38]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 角速度センサ (105)
Fターム[2F129BB38]に分類される特許
1 - 20 / 105
移動経路推定システム、移動経路推定装置及び移動経路推定方法
慣性航法演算方法及び慣性航法演算装置
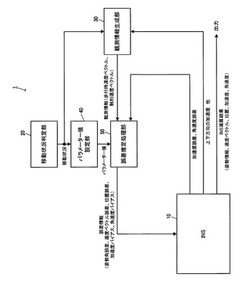
【課題】ユーザーの移動状況を考慮した新たな慣性航法演算の手法の提案。
【解決手段】ユーザーの移動状況が移動状況判定部20によって判定される。そして、パラメーター値設定部40によって、INS10が実行する慣性航法演算に係る演算値に含まれる誤差を推定する所定の誤差推定処理に係るパラメーターの値が、移動状況の判定結果に基づいて設定される。そして、誤差推定処理部50により、設定されたパラメーターの値を用いて誤差推定処理が実行され、INS10により、誤差推定処理によって推定された誤差を用いて演算値が補正されて慣性航法演算が行われる。
(もっと読む)
慣性航法演算方法及び慣性航法演算装置

【課題】慣性航法演算によって正確性の高い位置を算出するための新しい手法の提案。
【解決手段】第1演算システム1Aにおいて、運動に係る物理量を検出するセンサーとして、加速度センサー2A及びジャイロセンサー2Bの計測結果を用いて、INS演算部20が慣性航法演算を行う。この際、代表値算出部10は、所定の時間間隔毎に到来する時刻を跨ぎ、互いに時間的に重なり合うように設定される対象期間毎に、当該対象期間内に計測された計測結果の変動に基づいて算出方法を変更して計測結果を統計演算処理する。そして、INS演算部20が、代表値算出部10による統計演算処理の結果を用いて慣性航法演算を行う。
(もっと読む)
状態推定装置
【課題】高速且つ処理負荷の小さな非線形カルマンフィルタの演算を実現する。
【解決手段】状態推定装置は、3次元磁気センサ70を含む複数のセンサと、システムの状態を表す複数の状態変数を要素とする状態ベクトルxk及び複数のセンサからの出力値を要素とする観測値ベクトルykを用いて状態ベクトルxkを更新することによりシステムの状態を推定する複数のカルマンフィルタKFと、互いに異なる複数の初期ベクトルINIを生成し、状態ベクトルxkの初期値として複数のカルマンフィルタKFの各々に供給する初期値生成部200と、複数のカルマンフィルタKFの推定精度を各々評価することで、推定精度が最も高いカルマンフィルタを特定し、特定したカルマンフィルタKFを除く他のカルマンフィルタKFの動作を停止させるカルマンフィルタ制御部400とを備える。
(もっと読む)
操作装置、操作方法、及びプログラム
【課題】操作性に優れた操作装置およびその方法ならびにプログラムを提供する。
【解決手段】本発明にかかる操作装置(ナビゲーション装置1)の制御部10は、タッチパネル22を介して受け入れたタッチに応じて、LCD20に表示される画像をスクロールし、タッチが最終的にいずれかのシールボタン240に対して行われたときに、そのシールボタン240に設定された機能を実現し、連続的なタッチがタッチパネル22の画面領域26からシール領域24に移行した後で終了したときに、LCD20に表示される画像を、タッチが開始されたときにLCD20に表示されていた画像に戻す。
(もっと読む)
キャリブレーション方法、情報処理装置及びキャリブレーションプログラム
【課題】ジャイロの零点オフセットを簡易にキャリブレーションすることを課題とする。
【解決手段】サーバ装置30は、移動体端末10が第1の地点から位置または角度の誤差が特定量となる第2の地点へ移動した場合に、モーションセンサ11の出力を用いたデッドレコニングにより第2の地点で得られる位置または角度と特定量との差分を特定する。さらに、サーバ装置30は、特定結果として得られた差分から、当該移動体が静止状態である場合にジャイロ11bによって出力されるセンサ値である零点オフセットを算出する。
(もっと読む)
測位装置、測位方法
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含む。
(もっと読む)
道路情報学習装置
【課題】 道路情報の学習を効率よく確実に行うことを可能とした道路情報学習装置を提供する。
【解決手段】 学習する道路情報を選択し(ステップS1)、走行状態に応じた道路情報の算出精度を定め、指標化する(ステップS2)。指標に基づいて評価関数を求め(ステップS4)、それに基づいて道路情報推定に適した走行計画を生成する(ステップS4)。走行計画にしたがった走行時の走行情報を取得し(ステップS5)、道路情報を推定して、学習し(ステップS6)、地図情報データベース3にデータを格納する(ステップS7)。
(もっと読む)
ジャイロ用ゼロ点補正方法及び装置
【課題】ジャイロ出力のゼロ点補正値を停車時のジャイロ出力信号によって得る時、ターンテーブルに乗って回転しているときのジャイロの出力をゼロ点補正値としないようにジャイロ出力の閾値を設定する際に、高性能のジャイロを必要とせず、また車両停止時に方位マークが回転し続ける問題を解決する「ジャイロ用ゼロ点補正方法及び装置」とする。
【解決手段】車両の停止判定時に、ジャイロの出力によってそのゼロ点補正値を算出するとき、ジャイロの標準出力値の上下に、車両がターンテーブルに乗って回転している時のジャイロの出力以内の範囲に閾値を設定する。車両の停止判定時のジャイロの出力が、閾値の範囲外にあることを検出したときから継続して閾値を超えている経過時間を算出し、経過時間が1分等の所定時間を超えたとき、車両はターンテーブルに乗っていなかったと判定して、車両の停車判定開始時のゼロ点補正値を採用する。
(もっと読む)
旋回検出装置、端末装置及びプログラム
【課題】旋回検出装置、端末装置及びプログラムにおいて、ユーザが携帯する端末装置に適用した場合でも正確な旋回動作の検出を可能とすることを目的とする。
【解決手段】旋回検出装置は、ユーザに携帯される端末装置の加速度から偶数歩に相当する歩行周期を計測し、端末装置の角速度を歩行周期に応じた積分区間で時間積分することで、基準面に対する角度を示す現在の向きと歩行周期に相当する時間だけ前の向きとの差分を検出し、前記差分に基づいて端末装置の旋回を判定するように構成する。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSの測位誤差による誤表示を防止する。
【解決手段】移動体位置を道路リンクに対応付けるリンクマッチングを行う(S300)。第1の時刻の移動体位置と対応付けられた第1の道路リンクと、第1の時刻以前の第2の時刻の移動体位置と対応付けられた第2の道路リンクとが、直進性を有しない不連続な位置関係にあるとき、第1の時刻と第2の時刻との間にジャイロスコープが出力した変位角に基づいて、第1の道路リンクへのリンクマッチングが適当であるか否かを判定する(S304)。
(もっと読む)
ヨーレートのずれ検出装置
【課題】ヨーレートセンサにより検出されたヨーレート検出値のずれを正確に検出する。
【解決手段】自車両のヨーレートを検出するヨーレートセンサ30と、自車両の前方の物体を検知する前方物体検知センサ31と、前方物体検知センサ31により検知された物体が固定物であるのかを認識する前方物体認識部10と、前方物体認識部10により認識された固定物が自車両に対してその横方向に相対的に移動する横移動量を測定する横移動量測定部12と、横移動量測定部12により測定された横移動量に基づいて、自車両のヨーレートを推定するヨーレート推定部13と、ヨーレートセンサ30により検出されたヨーレート検出値の、ヨーレート推定部13により推定された推定ヨーレート値からのずれを検出するずれ検出部14とを設ける。
(もっと読む)
ヨー角初期化異常判定装置及び方法
【課題】慣性装置が搭載された車両が移動するような場合に、ヨー角初期化が異常であるか否かを容易に判定することができるヨー角初期化異常判定装置及び方法を提供すること。
【解決手段】ヨー角初期化異常判定装置200は、GPS受信機によって算出された方位角の平均値を算出し、IMUによって計測されたヨー角度の平均値を算出し、アルゴリズム速度によって移動体の移動方向が前進か後退かを判定し、判定した移動方向に基づいて、方位角の平均値と、ヨー角度の平均値との差分を算出し、算出した差分が閾値以上であるか未満であるかを判断する。さらに、算出した差分が閾値以上であると判断した場合にカウントをインクリメントし、算出した差分が閾値未満であると判断した場合にカウントをデクリメントし、計数したカウントが一定の値以上であるか否かを判断し、一定の値以上であると判断した場合に、異常状態と判定する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記自立航法軌跡と前記GPS軌跡との一致度を最も高くするための前記自立航法情報の第1補正量を取得し、当該第1補正量より小さい第2補正量によって前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
位置算出方法及び位置算出装置
【課題】慣性航法を利用した位置算出の正確性を向上させるための新たな手法を提案すること。
【解決手段】自動車に設置されたジャイロセンサーの検出結果を用いて、移動体である自動車の姿勢及び移動方向が検出される。そして、検出された姿勢に基づいて、自動車に設置された加速度センサーの検出結果が、相対座標系から絶対座標系に座標変換され、座標変換後の検出結果を用いて、速度ベクトルが算出・更新される。そして、算出された速度ベクトルが検出された移動方向を用いて補正され、補正された速度ベクトルを用いて、自動車の位置が算出・更新される。
(もっと読む)
位置算出方法及び位置算出装置
【課題】人間用搬送機器の搬送路にユーザーが乗った際のユーザーの位置を正しく求めるための新たな手法を提案すること。
【解決手段】位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
(もっと読む)
車載用ジャイロのオフセット補正装置
【課題】車両が走行中であってもピッチレートジャイロのオフセットを補正できる車載用ジャイロのオフセット補正装置を提供する。
【解決手段】オフセット補正手段104が、ピッチレートジャイロ101により検出された回転角から求めた角速度のうちヨーレートジャイロ102が検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値をピッチレートジャイロ101のオフセット値として補正を行うものである。
(もっと読む)
ヨーレート補正装置、及びその方法
【課題】ヨーレートセンサによって検出されるヨーレートを補正することのできるヨーレート補正装置、及びその方法を提供する。
【解決手段】自車両の走行方向の画像を撮像する撮像手段と、画像における自車両の旋回時の消失点を第1の消失点として検出し、当該画像における自車両の直進時の消失点を第2の消失点として検出する消失点検出手段と、第1の消失点と第2の消失点との画像上の水平方向の間隔に基づき、自車両のヨーレートを推定ヨーレートとして推定する推定手段と、自車両のヨーレートを検出する検出手段と、推定ヨーレートに基づきヨーレートを補正した補正ヨーレートを算出する補正手段とを備える。
(もっと読む)
1 - 20 / 105
[ Back to top ]