
Fターム[2F129BB39]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 加速度センサ (110)
Fターム[2F129BB39]に分類される特許
1 - 20 / 110
慣性航法演算方法及び慣性航法演算装置
【課題】慣性航法演算によって正確性の高い位置を算出するための新しい手法の提案。
【解決手段】第1演算システム1Aにおいて、運動に係る物理量を検出するセンサーとして、加速度センサー2A及びジャイロセンサー2Bの計測結果を用いて、INS演算部20が慣性航法演算を行う。この際、代表値算出部10は、所定の時間間隔毎に到来する時刻を跨ぎ、互いに時間的に重なり合うように設定される対象期間毎に、当該対象期間内に計測された計測結果の変動に基づいて算出方法を変更して計測結果を統計演算処理する。そして、INS演算部20が、代表値算出部10による統計演算処理の結果を用いて慣性航法演算を行う。
(もっと読む)
慣性航法演算方法及び慣性航法演算装置

【課題】ユーザーの移動状況を考慮した新たな慣性航法演算の手法の提案。
【解決手段】ユーザーの移動状況が移動状況判定部20によって判定される。そして、パラメーター値設定部40によって、INS10が実行する慣性航法演算に係る演算値に含まれる誤差を推定する所定の誤差推定処理に係るパラメーターの値が、移動状況の判定結果に基づいて設定される。そして、誤差推定処理部50により、設定されたパラメーターの値を用いて誤差推定処理が実行され、INS10により、誤差推定処理によって推定された誤差を用いて演算値が補正されて慣性航法演算が行われる。
(もっと読む)
情報処理装置及び制御方法
【課題】アプリケーション間の連携の結果、好適に情報を取得することのできる情報処理装置及び制御方法を提供する。
【解決手段】第1のアプリケーション500と、第1のアプリケーション500から起動可能な第2のアプリケーション600とを実行可能な携帯端末であって、第1のアプリケーション500は、施設情報を取得する施設情報取得部505と、施設情報に応じた画像を表示する画像表示制御部509dと、画像に付与された画像識別子をパラメータと渡して第2のアプリケーション600を起動させる第2アプリ起動部511とを備え、第2のアプリケーション600は、第1のアプリケーション500から渡された画像識別子を元に、解像度の高い画像を取得する画像取得部601と、画像を表示する画像表示制御部607bとを備える。
(もっと読む)
状態推定装置
【課題】高速且つ処理負荷の小さな非線形カルマンフィルタの演算を実現する。
【解決手段】状態推定装置は、3次元磁気センサ70を含む複数のセンサと、システムの状態を表す複数の状態変数を要素とする状態ベクトルxk及び複数のセンサからの出力値を要素とする観測値ベクトルykを用いて状態ベクトルxkを更新することによりシステムの状態を推定する複数のカルマンフィルタKFと、互いに異なる複数の初期ベクトルINIを生成し、状態ベクトルxkの初期値として複数のカルマンフィルタKFの各々に供給する初期値生成部200と、複数のカルマンフィルタKFの推定精度を各々評価することで、推定精度が最も高いカルマンフィルタを特定し、特定したカルマンフィルタKFを除く他のカルマンフィルタKFの動作を停止させるカルマンフィルタ制御部400とを備える。
(もっと読む)
加速度センサのゼロ点検出装置、ゼロ点検出方法、および、プログラム
【課題】加速度センサに作用する加速度がゼロとなった状態の感応軸毎の検出値を精度よく求めることを可能にする。
【解決手段】加速度検出装置は、車両が停止状態であると判定されたとき、加速度センサ111で検出された感応軸毎の検出値と、加速度センサ111の感応軸毎のゼロ点との、感応軸毎の差分から構成される合成ベクトルの大きさが、重力加速度と等しくなることを利用した方程式を最小二乗法、或いは、逐次最小二乗法を用いて解法することで、加速度センサ111の感応軸毎のゼロ点を求める。このため、求めた検出値に誤差が含まれる余地を低減することができる。よって、加速度センサ111の感応軸毎のゼロ点を精度よく求めることができる。これにより、加速度検出装置は、加速度センサ111に作用する加速度も精度よく求めることができる。
(もっと読む)
携帯型電子デバイスのための、磁場センサおよび加速度計を使用して姿勢および角速度を検知するシステムおよび方法
【課題】動的な物体の姿勢および角速度を含んだ動き情報を決定するシステムである。
【解決手段】3つの略直交する方向における磁場の強度および/または方向を、本体基準座標系において測定するための磁場検知デバイス71と、物体の全加速度を本体基準座標系において測定するために適合されている加速度検知デバイス72と、フィルタにおいて、全加速度の測定データおよび磁場の測定データと運動力学的モデルとを組み合わせることによって、姿勢および角速度を算出するために適合されているプロセッサ75とを備えている。
(もっと読む)
操作装置、操作方法、及びプログラム
【課題】操作性に優れた操作装置およびその方法ならびにプログラムを提供する。
【解決手段】本発明にかかる操作装置(ナビゲーション装置1)の制御部10は、タッチパネル22を介して受け入れたタッチに応じて、LCD20に表示される画像をスクロールし、タッチが最終的にいずれかのシールボタン240に対して行われたときに、そのシールボタン240に設定された機能を実現し、連続的なタッチがタッチパネル22の画面領域26からシール領域24に移行した後で終了したときに、LCD20に表示される画像を、タッチが開始されたときにLCD20に表示されていた画像に戻す。
(もっと読む)
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
(もっと読む)
ナビゲーション装置およびその案内方法
【課題】 本発明の目的は、進行してはならない方向を直感的に把握できるナビゲーション装置の技術を提供することにある。
【解決手段】
本発明に係るナビゲーション装置は、分岐ごとに、分岐先のそれぞれの道路の規制情報に基づいて、進行が規制される分岐方向を特定する規制特定手段と、前記規制特定手段により特定した規制のある分岐方向に応じ、進行方向の規制を表示する標識を特定する標識特定手段と、前記標識特定手段により特定した標識を地図に重畳して出力する標識出力手段と、を備えることを特徴とする。
(もっと読む)
ナビゲーションデバイスの位置を決定すること
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
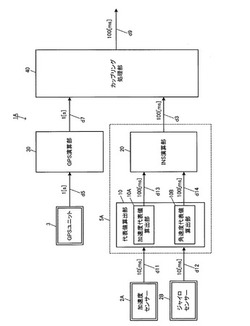
位置算出方法及び位置算出装置
【課題】 移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】 GPSユニット3とINSユニット5とを備えた位置算出装置1において、位置算出精度判定部6は、位置算出精度を判定する。影響度合設定部7は、位置算出精度判定部6により判定された位置算出精度に基づいて、GPS計測結果のINS計測結果に対する影響度合を設定する。カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
情報提示装置、情報提示方法、情報提示プログラムおよび情報提示プログラムを格納した記録媒体
【課題】例えば、使用者が方向感覚を掴むことができるような目標物を提示することができる情報提示装置、情報提示方法、情報提示プログラムおよび情報提示プログラムを格納した記録媒体を提供する。
【解決手段】端末部10から現在地と進行方向の情報をサーバ部20へ送信し、サーバ部20の目標物情報検索部22で現在地Xと進行方向Yの情報に基づいてランドマーク検索エリアZ内の進行方向と、進行方向Yの左右方向のランドマークと地形を検索して、それらの表示するための画像および表示位置の指示情報と、ランドマークと地形を表示する際の位置関係を示す情報と、を目標物情報として端末部10へ送信し、端末部10では、目標物情報に基づいて制御部14が表示用画像蓄積部13から表示するアイコン等の画像情報を読み出して表示部16へ表示させる。
(もっと読む)
姿勢判定方法、位置算出方法及び姿勢判定装置
【課題】移動体に対するセンサーの姿勢を判定するための新たな手法を提供する。
【解決手段】移動体に設置されたセンサー3により移動ベクトルが計測される。そして、移動体が移動を開始した際にセンサー3が計測した移動ベクトルを用いて、移動体に対するセンサー3の姿勢が判定され、移動体が停止している場合に、移動体の速度に関する制約条件を用いて、センサー3の計測結果が補償される。
(もっと読む)
測位装置、測位方法
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含む。
(もっと読む)
車両位置検出装置、車両位置検出方法
【課題】本発明では、当該車両位置検出装置のシステム構成を複雑にすることなく、自車両が駐車場等の開けた場所に存在するか否かを判定する車両位置検出装置、及び当該車両位置検出装置による車両位置検出方法を提供することを目的とする。
【解決手段】本発明に係る車両位置検出装置では、複数のGPS衛星から送信される測位信号に基づいて車両位置を検出する車両位置検出装置であって、前記測位信号を検出する測位信号検出手段と、前記測位信号検出手段により検出される前記測位信号に関するマルチパス信号の検出状況に基づいて、前記車両が開けた場所に存在するか否かを判定するオフルート判定手段と、を有することを特徴とする。
(もっと読む)
移動体測位方法、移動体測位装置
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータをバッファリングすることと、バッファリングされた前記慣性センサーデータを用いてINS測位演算を行うことと、現在時刻に対するGPS測位の遅延時間を計算することと、GPSデータの出力時刻とGPS測位結果とをバッファリングすることと、バッファリングされた前記GPS測位結果とINS測位結果との時刻同期をとることと、バッファリングされた前記慣性センサーデータと、前記慣性INS測位結果と、バッファリングされた前記GPS測位結果と、をカップリングし、位置・速度・姿勢の誤差を推定することと、前記位置・速度・姿勢の誤差を前記INS測位結果にフィードバックし、補正する。GPSデータと慣性センサーデータの時刻同期をとり、正確なINS測位結果の誤差補正を行うことによって、高精度な移動体測位を行うことができる。
(もっと読む)
道路情報学習装置
【課題】 道路情報の学習を効率よく確実に行うことを可能とした道路情報学習装置を提供する。
【解決手段】 学習する道路情報を選択し(ステップS1)、走行状態に応じた道路情報の算出精度を定め、指標化する(ステップS2)。指標に基づいて評価関数を求め(ステップS4)、それに基づいて道路情報推定に適した走行計画を生成する(ステップS4)。走行計画にしたがった走行時の走行情報を取得し(ステップS5)、道路情報を推定して、学習し(ステップS6)、地図情報データベース3にデータを格納する(ステップS7)。
(もっと読む)
携帯型電子装置、スタンド、及び、落下防止方法
【課題】スタンド又は携帯電子装置の取付け状態を監視し、脱落しそうな状態であれば報知する。
【解決手段】被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、前記携帯型電子装置に加わる振動値を検出するセンサ部と、前記振動値と基準値記憶部に記憶された基準値とに基づいて前記被設置面への前記携帯型電子装置の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを報知部を介して出力する制御部と、を備えることを特徴とする。
(もっと読む)
測位システム、測位方法
【課題】慣性センサーデータとGPS測位データとを融合した高精度な測位方法を実現する。
【解決手段】測位方法は、慣性センサーデータとGPS測位データとを融合して移動体を測位する測位方法であって、慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、GPS測位データに基づき、拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、推定された位置誤差・速度誤差・方位角誤差・ジャイロバイアス誤差・加速度バイアス誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、を有する。
(もっと読む)
位置履歴管理装置、位置履歴管理システム、サーバ装置、位置履歴管理方法、および、プログラム
【課題】時系列において前の位置情報の履歴に基づいて補正する場合に比べて精度の高い補正必要性の判断を行うことができる、位置履歴管理装置、位置履歴管理システム、サーバ装置、位置履歴管理方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、位置情報を時系列に記憶し、道路網を規定する道路ネットワークデータを記憶し、位置情報に対応する道路ネットワークデータをマッチングにより特定し、対象とする位置情報について特定した道路ネットワークデータと、当該対象とする位置情報から時系列的に後または前後の位置情報について特定した道路ネットワークデータとを比較して、当該位置情報間の接続性を判定し、判定した接続性の判定結果に基づいて、対象とする位置情報の補正が必要か否かを判定する。
(もっと読む)
1 - 20 / 110
[ Back to top ]