
Fターム[2F129BB41]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | オフセット (104)
Fターム[2F129BB41]に分類される特許
21 - 40 / 104
車載用ジャイロのオフセット補正装置
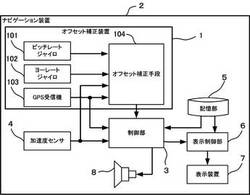
【課題】車両が走行中であってもピッチレートジャイロのオフセットを補正できる車載用ジャイロのオフセット補正装置を提供する。
【解決手段】オフセット補正手段104が、ピッチレートジャイロ101により検出された回転角から求めた角速度のうちヨーレートジャイロ102が検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値をピッチレートジャイロ101のオフセット値として補正を行うものである。
(もっと読む)
磁気データ処理装置、方法及びプログラムならびに磁気測定装置

【課題】蓄積された磁気データ群からオフセットを正確に導出できる磁気データ処理装置、方法及びプログラム、並びに磁気測定装置を提供する。
【解決手段】磁気センサから出力される磁気データqiを順次入力する入力手段(92)と、前記磁気データのオフセットを導出するために複数の前記磁気データを母集団データ群として蓄える蓄積手段(92)と、前記母集団データ群を構成する前記複数の磁気データのそれぞれを重み付けしたデータ群を母集団とする統計的手法により前記オフセットを導出する導出手段(94)と、を備える磁気データ処理装置。
(もっと読む)
磁気センサ制御装置および方法
【課題】オフセットの算出に統計処理を用いる必要のない磁気センサ制御装置を提供する。
【解決手段】3次元磁気センサから順次出力される、3成分を有する複数の磁気データを入力する入力手段と、入力された複数の前記磁気データから、予め決められた4点選抜条件を満たす4つの前記磁気データを選抜する選抜手段と、選抜された4つの前記磁気データを成分とする4点から等距離にある点である中心点を算出する算出手段と、前記中心点の成分を前記磁気データのオフセットとして設定する設定手段と、を備え、前記4点選抜条件は、選抜候補の4つの前記磁気データを成分とする4点を頂点とする四面体の正四面体に対する歪みに相関する条件を含む、磁気センサ制御装置。
(もっと読む)
ナビゲーションシステムおよび車載装置
【課題】自車両の状態変化によって自車位置の予測精度が低下することを防止しつつ、車載装置によって表示される自車位置と実際の自車位置とのずれを低減すること。
【解決手段】車載装置の走行距離算出部が、自車両から出力される車速パルスと車速算出用係数とを用いて算出される自車速度に基づき、所定区間における第1の走行距離を算出し、携帯端末装置の走行距離算出部が、所定区間における自車両の第2の走行距離を測位衛星から提供されるGPS情報に基づき算出し、学習部が、第1の走行距離と第2の走行距離との比較結果に基づき、車速算出用係数を補正し、携帯端末装置の自車位置予測部が、車速パルスと補正された車速算出用係数とを用いて算出された自車速度に基づき、自車位置を予測するようにナビゲーションシステムを構成する。
(もっと読む)
傾斜角検出装置、傾斜角検出方法、および傾斜角検出プログラム
【課題】加速度センサのオフセットを高精度に算出することによって、傾斜角を高精度に検出する技術を提供する。
【解決手段】加速度センサ12は、加速度信号を取得し、速度センサ10は、速度信号を取得する。誤差設定部14は、加速度センサ12の観測誤差を設定する。ゲイン演算部24、状態変数更新部26は、加速度センサ12の観測誤差と、加速度信号と、速度信号とをもとにカルマンフィルタ処理を実行することによって、車両の傾斜角と加速度センサ12のオフセットとを更新する。ここで、誤差設定部14は、速度信号と、既に更新した車両の傾斜角とをもとに、加速度センサ12の観測誤差を設定する。
(もっと読む)
方位角計測装置
【課題】ホール素子を用いて検出された地磁気に基づいて、方位を計測する。
【解決手段】補正値記憶部7には、x軸ホール素子HExおよびy軸ホール素子HEyの基準値Lx、Lyが記憶され、補正計算部6は、x軸ホール素子HExおよびy軸ホール素子HEyの出力増幅値Dx、Dyから回路的にキャンセル可能なオフセットを減じ、さらに基準値Lx、Lyを減算することにより、地磁気の各軸成分に比例した値α、βだけを取り出す。
(もっと読む)
多次元センサのオフセット、感度、および非直交性の較正
多次元センサ、磁気計、または加速度計が、センサによって提供される生データに基づいて較正される。生データが収集されると、これを使用して2次元センサまたは3次元センサのそれぞれ楕円パラメータまたは楕円体パラメータを生成することができる。例えば決定された楕円パラメータまたは楕円体パラメータなど、生データに基づいてオフセット較正係数が計算される。次いでこのオフセット較正計数および生データに基づいて、感度較正係数が計算される。次いでこの計算されたオフセットおよび感度較正係数に基づいて、非直交性較正係数を計算することができる。オフセット、感度、および非直交性較正係数を使用して生データを補正し、較正されたデータを生成することができる。  (もっと読む)
(もっと読む)
車両経路判定方法およびナビゲーション装置
【課題】走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供すること。
【解決手段】自車両の現在位置がランプ区間に入っていると、そのランプ区間の分岐道路の分岐経路傾斜属性101と、前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す。そして、分岐経路傾斜属性101、本線経路傾斜属性102および判定される傾斜属性103に対応して判定結果104が設定されたテーブルTBLを、傾斜算出部6で判定された傾斜属性103と、記憶部13から読み出した分岐経路傾斜属性101と本線経路傾斜属性102とをもとに参照し、現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果104を取得する。
(もっと読む)
磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム
【課題】3次元地磁気センサから出力される地磁気データのオフセット誤差を補正する磁気データ処理装置を提供する。
【解決手段】3次元磁気センサ20から出力される磁気データを順次取得しながら前記磁気データを母集団として繰り返し蓄積する蓄積手段91と、前記母集団が蓄積される度に、球面の方程式から導かれる目的関数f(p)の最小値を前記母集団の信頼指数Sとして導出し、前記母集団を十分信頼できるか否かを前記信頼指数Sを用いて判定する判定手段92と、前記母集団を十分信頼できる場合、前記母集団に基づいて前記磁気データのオフセットを導出するオフセット導出手段94a、94bと、を備える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
加速度センサのオフセット誤差を補正する携帯型情報機器、方法及びプログラム
【課題】加速度センサのオフセット誤差を自動的に補正する携帯型情報機器、方法及びプログラムを提供する。
【解決手段】携帯型情報機器は、加速度センサと、地磁気ベクトルと、地磁気ベクトルを用いて加速度センサのオフセット誤差を決定し、そのオフセット誤差によって加速度センサに対して補正する加速度補正手段とを有する。加速度補正手段は、少なくとも4つの時点について、加速度ベクトルにおける地磁気向き加速度を算出する地磁気向き加速度算出手段と、複数の地磁気向き加速度の変動差分値が、所定閾値よりも大きい場合に、加速度センサのオフセット補正が必要であると判定する補正可否判定手段と、加速度センサのオフセット補正が必要であると判定された際に、4つの地磁気向き加速度が一致するように、加速度ベクトルのオフセット誤差を算出するオフセット誤差算出手段とを有する。
(もっと読む)
慣性航法装置、飛翔体及び航法データ算出方法
【課題】飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供する。
【解決手段】本発明の慣性航法装置Aは、慣性計測器11の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機12と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部14と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部13と、を有するという構成を採用する。
(もっと読む)
携帯電子機器及び地磁気センサ較正方法
【課題】電磁結合による非接触通信に伴う地磁気の検出精度の低下等に起因する方位に関する表示制度の低下を抑制できる携帯電子機器とその地磁気センサ較正方法を提供する。
【解決手段】非接触通信機能部(111)において非接触通信が行われた場合、その通信の終了後に地磁気センサ(110)のキャリブレーションに関わる処理および方位の算出する処理を実行することにより、非接触通信に伴う方位に関する表示精度の低下を抑制する。
(もっと読む)
計算機装置
【課題】GPS方位計において、整数値バイアスを少ない計算負荷により短時間で導出する。
【解決手段】GPSアンテナ9および10のアンテナ間距離を、GPS衛星11からの測位信号の搬送波の1/2波長以下とするとともに、GPS信号受信部7および8が用いる基準クロックを共通にすることによって、方位計算部12は、GPS信号受信部7および8から得られる信号を用いて、搬送波位相観測値の一重差方程式に含まれる整数値バイアスを簡単な代数計算だけで解ける。
(もっと読む)
ナビゲーション装置及びナビゲーション用プログラム
【課題】より誤マッチングを少なくすると共に、走行軌跡の補正を適切に行う。
【解決手段】GPSの測定精度から求めた最大想定誤差eを半径とする信頼度円を求め、対応する推測位置と候補地点から信頼度円までの距離の二乗値を両地点の地点相関値sとし、推測軌跡、候補軌跡上の各地点の地点相関値を累計した値を、推測軌跡の相関値Sp、候補軌跡の相関値Sqとする。推測軌跡の相関値Spが、候補地点による推測軌跡(候補軌跡)の相関値Sqよりも悪く(大きな値)なる場合、推測軌跡の補正を行わず、相関値が良く(小さく)なる場合に推測軌跡の補正、すなわち候補軌跡を補正後の推測軌跡とする。このように、GPSの測位位置に対する信頼度だけではなく、所定区間のGPS軌跡に対する補正前後の推測軌跡の相関値を考慮することで、より推測軌跡をより正確な位置に残すことが可能となり、結果として自車位置精度の向上が可能となる。
(もっと読む)
自律測位装置、および自律測位プログラム
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】(A)の状態から三角形△abcを平行移動し、点gを点Gに一致させる。(B)で重心gを中心として三角形△abcを回転角φ分回転させる。回転角φは0°≦φ≦360°であり、所定量Δφずつ加算されていく。この状態が(C)である。回転前に、頂点Pa,PA間距離aA、頂点Pb,PB間距離bB、頂点Pc,PC間距離cCの和を算出する。(D)は回転後の状態を示している。回転角φの回転後においても、頂点Pa,PA間距離aA、頂点Pb,PB間距離bB、頂点Pc,PC間距離cCの和を算出して、回転前の距離aA〜cCの和と比較する。回転後のほうが小さいときの回転角φを保存する。そして、最終的に得られた回転角φと地点Pcに到達する移動軌跡Vbcの最終ベクトルvendにおける移動回転角とを加算することで初期方位が算出される。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
角速度センサ補正装置、角速度算出装置、角速度センサ補正方法、角速度算出方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】GPS測位部20は、GPS衛星からの信号を受信して、対象物の方位が少なくとも含まれたGPS測位データ200を出力する。角速度センサ26は、対象物における角速度を出力する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、角速度センサの仮のオフセット値を逐次導出する。オフセット値演算部28は、角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサのオフセット値を導出する。ここで、統計処理の際の忘却係数は、対象物の走行状態に応じて変更される。
(もっと読む)
21 - 40 / 104
[ Back to top ]