
Fターム[2F129BB41]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | オフセット (104)
Fターム[2F129BB41]に分類される特許
81 - 100 / 104
測位装置、ナビゲーションシステム
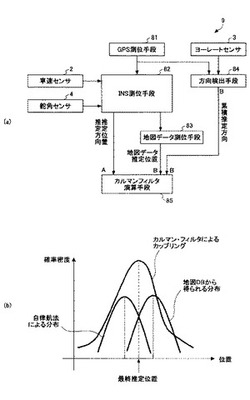
【課題】GPS衛星が捕捉困難な状態であっても、従来の地図データを使用して、精度よく測位することができる測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段81により移動体の位置を検出する測位装置9において、移動体の挙動情報を検出する第1及び第2の自律センサ2、4、3と、測位結果に第1の自律センサによる検出情報を累積して推定位置及び推定方向を検出する位置検出手段82と、推定位置に基づき地図データ記憶手段5を参照し対応するリンクから所定距離の地図データ推定位置を検出する地図データ測位手段83と、測位結果に第2の自律センサによる検出情報を累積して累積推定方向を検出する方向検出手段84と、推定位置及び地図データ推定位置並びに推定方向及び累積推定方向をカルマンフィルタに適用して移動体の位置を推定する最尤位置推定手段85と、を有することを特徴とする。
(もっと読む)
位置検出装置、その方法、そのプログラム及びその記録媒体

【課題】
移動体の位置を精度良く求める。
【解決手段】
マップマッチング位置算出部221は、地図情報121における道路上を車両が走行することを想定しつつ、GPS受信ユニット170による測位結果及び走行センサユニットによる検出結果に基づいて、マップマッチング位置を算出する。また、センサ位置算出部222は、走行センサユニットによる検出結果に基づいて、センサ位置を算出する。このセンサ位置は、当該測位結果又はマップマッチング位置の精度が高いと判断される場合には、センサ位置初期化部223により初期化される。こうして適宜初期化が施されるセンサ位置の精度がセンサ位置精度評価部224により高いと評価され、かつ、センサ位置とマップマッチング位置とがある程度以上離れている場合に、マップマッチング位置補正部225が、センサ位置を基準としてマップマッチング位置を補正する。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】AHRSとINSで構成を共通化し、温度計を使わずジャイロの温度ドリフト誤差を補正し、基準となる姿勢・方位データを使わずジャイロセンサ誤差と加速度計誤差を補正する慣性航法装置。
【解決手段】推定センサ誤差データからジャイロと加速度計の出力を補正するセンサ誤差補正計算部と、補正後の移動体の位置や姿勢を計算し、推定姿勢/方位誤差データより移動体の位置や姿勢を補正する航法・姿勢方位計算部と、補正後の位置や姿勢の情報と移動体上のGPSセンサの絶対位置と絶対速度と比較して、ジャイロにおける温度ドリフトの影響を分離する温度誤差推定部と、分離後の温度ドリフト等の影響よりジャイロと加速度計の出力の誤差を推定しセンサ誤差補正計算部で使用するセンサ誤差データを校正し、補正後の位置や姿勢の出力の誤差を推定し航法・姿勢方位計算部で使用する姿勢/位置誤差データを校正するセンサ固有誤差推定部とを有する。
(もっと読む)
走行路区別方法及び走行路区別装置
【課題】双曲線航法の原理を利用し区別対象の走行路に対して固定局を適切に配置することで、移動局の存在する走行路の検出精度を向上する。
【解決手段】移動局(列車)2A,2Bが走行する走行路(線路)4A,4Bの各中心線上で、受信時刻差がそれぞれ零となるように、走行路4A,4Bを挟んで固定局1A〜1Cを配置し、移動局2A,2Bから送信した信号を各固定局1A〜1Cで受信し、走行路判定部3により、固定局1Aと1Cの受信時刻差及び固定局1Bと1Cの受信時刻差を算出し、受信時刻差の正負に基づいて送信元の移動局が存在する走行路を判定する。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
移動体の水平走行判定装置及び方法
【課題】移動体が走行している路面の状態を正確に判定することのできる移動体の水平走行判定装置を提供する。
【解決手段】移動体に搭載される機器の取付け角度を算出及び検証することにより、移動体が走行している路面の状態を判定することが可能となる。具体的には、移動体が直進している場合に加速度センサ12で検出される値から筐体が取付けられている角度の候補を算出する。そして、ある程度のデータ量の取付け角度の候補を蓄積させ、正規性の検定を行うことにより、取付け角度の範囲を設定する。次に、角速度センサ10で検出される値から筐体が取付けられている角度の候補を算出し、その値が設定した範囲内にある程度のデータ量蓄積されたとき設定した取付け角度の信頼性は高く、その後に算出した取付け角度の候補から移動体が走行している路面の状況を判定することができる。
(もっと読む)
車両の挙動制御装置
【課題】 走行中と停車時にそれぞれヨーレートセンサのゼロ点補正を可能とした車両の挙動制御装置において、適切なゼロ点補正を行うことを可能とした車両の挙動制御装置を提供する。
【解決手段】 車両走行中で走行中のヨーレート補正値(YR0)演算条件が成立した場合には、走行中ヨーレート補正値YR0Mを求め(ステップS11、12)、停止中に停止中のヨーレート補正値(YR0)演算条件が成立した場合には、停止中ヨーレート補正値YR0Sを求める(ステップS15、17)。直近のYR0M補正時点からの経過時間を示すカウンタ値CTが所定のしきい値Thxを越えている場合には、YR0MをYR0Sで置き換える(ステップS18、19)。そして、YR0MとYR0Sとの差の絶対値Ydiffがしきい値Aを越えている場合には、車両挙動制御(ステップS26)の制御しきい値をかさ上げする(ステップS23、24)。
(もっと読む)
磁気センサ制御装置、方法及びプログラム
【課題】オフセットの算出に統計処理を用いる必要のない磁気センサ制御装置、方法及びプログラムを提供する。
【解決手段】3次元磁気センサから順次出力される、3成分を有する複数の磁気データを入力する入力手段と、入力された複数の前記磁気データから、予め決められた4点選抜条件を満たす4つの前記磁気データを選抜する選抜手段と、選抜された4つの前記磁気データを成分とする4点から等距離にある点である中心点を算出する算出手段と、前記中心点の成分を前記磁気データのオフセットとして設定する設定手段と、を備える磁気センサ制御装置。
(もっと読む)
加速度センサのオフセット検出装置、加速度センサのオフセット検出方法及び加速度センサのオフセット検出プログラム並びにナビゲーション装置
【課題】本発明は、加速度センサのゼロ重力オフセットを高精度に検出できるようにする。
【解決手段】速度検出ユニット2は、GPS処理部4から位置情報PSを取得できる場合、(15)式に従い、実際に加速度センサ11から得られた実検出加速度αGrと、位置情報PSに基づく車両加速度αP、距離Dm、気圧PRに基づく高度変化量Dh及び重力加速度gを用いた演算を行うことにより、オフセット加速度αoを高精度に算出することができ、当該オフセット加速度αoを換算したゼロ重力オフセット値Vzgoを基に、加速度検出信号SAを精度良く検出加速度αGに換算することができる。
(もっと読む)
ナビゲーション装置及び方位算出方法
【課題】磁気センサの周囲の磁性体の影響により、磁気センサを用いた走行方位の検出の精度が悪化することを防ぎ、GPS信号を受信できない場合であっても、磁気センサを用いて走行方位の検出を行うことにより、走行位置を正確に特定することができるナビゲーション装置を提供する。また、磁気センサの出力値から精度よく走行方位を算出する方位算出方法を提供する。
【解決手段】GPS信号を受信可能である場合は、GPSの位置情報及びジャイロセンサの出力値から走行方位を算出する。GPS信号を受信不可能である場合は、磁気センサの出力値から方位算出テーブルを参照して走行方位を算出する。GPSの位置情報及びジャイロセンサの出力値から走行方位を算出した場合には、算出した走行方位及び磁気センサの出力値を磁気センサの算出テーブルの更新用データとして記録する。データが所定数蓄積された場合には、算出テーブルの更新を行う。
(もっと読む)
ナビゲーション装置
【課題】0点電圧の検出精度を向上させて車両の現在位置を正確に推定させることを可能とし、しかも特別な機構の追加を要さず、簡易に実現可能なナビゲーション装置を提供する。
【解決手段】車両の後退時にバックギアチェンジを検出する車両後退検出手段と、車速パルスから車両の走行状態を検出する走行検出手段と、車両の方位を検出する方位検出手段と、車両の現在時位置を推定する自車位置推定手段とを備え、前記車両後退検出手段でバックギアが入っていないことを検出し、かつ、前記走行検出手段で一定時間車速パルスが発生しないことを検知した場合に、前記方位検出手段の出力を基準値として記憶するように構成されている。
(もっと読む)
キャリア位相相対測位装置及び方法
【課題】
整数バイアス解の再決定時のみならず、電源投入直後における最初の整数バイアス解の決定時においても、移動体の姿勢情報を用いて整数バイアス候補解の検定を行うことができるキャリア位相相対測位装置及びその方法を提供することを目的とする。
【解決手段】
衛星から送信される測位用信号を受信するために、移動体上に固定された複数のアンテナ1と、加速度及び角速度を計測する慣性センサ3を備えたキャリア位相相対測位装置において、少なくとも最初の整数バイアス解の決定前に、慣性センサ3の観測量を用いて移動体の姿勢情報を算出する基準姿勢演算部6を設け、整数バイアス検定部7により、基準姿勢演算部6で算出した姿勢情報を用いて、整数バイアス推定部4で推定した整数バイアス候補解の検定を行うことを特徴とする。
(もっと読む)
無線装置
【課題】 測位地点の周辺環境の影響やGPS衛星の配置の影響等によって、測位座標点が、真の座標点に対してオフセット値を有する場合であっても、また、無線装置が、移動状態である場合であっても、十分な測位精度で当該無線装置の存在位置を決定する。
【解決手段】 本発明に係る無線装置30は、位置情報を取得する位置情報取得部31と、取得した位置情報についての推定誤差値を取得する推定誤差値取得部33と、無線装置の移動状態を決定する移動状態決定部34と、取得された推定誤差値と決定された移動状態とに基づいて、無線装置の存在位置を決定する位置決定部36とを具備する。
(もっと読む)
リアルタイムバイアス推定器に基づく慣性機器のための自己較正
1つの例示的な慣性測定装置が、自己較正バイアス補正信号を組み込む。第1の慣性機器及び第2の慣性機器が、測定される慣性属性を表す、それぞれの入力信号を生成する。バイアス推定器が、第1のバイアス補正信号及び第2のバイアス補正信号を生成する。第1の加算ノード及び第2の加算ノードが、それぞれの入力信号と、それぞれの第1のバイアス補正信号及び第2のバイアス補正信号とを受信する。第1の加算ノード及び第2の加算ノードは、それぞれの加算された信号を、第1の慣性機器及び第2の慣性機器に提供する。第1の慣性機器及び第2の慣性機器は、それぞれの加算された信号に基づいて、慣性属性の値を表す、それぞれの出力信号を生成する。バイアス推定器が、それぞれの第1の時間間隔中及び第2の時間間隔中に行われる第1の測定及び第2の測定に基づいて、第1のバイアス補正信号及び第2のバイアス補正信号を計算し、第1のバイアス誤差信号及び第2のバイアス誤差信号のうちの一方の符号が、第1の時間間隔中の一方の状態から、第2の時間間隔中の他方の状態に変化する。 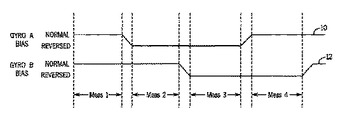 (もっと読む)
(もっと読む)
角速度センサの零点補正装置および補正方法
ロボット等の運動体に角速度センサ(10)が設けられる。第1設定器(14)は角速度の変化幅が所定幅以下であるか否かで静止状態を判定し、静止判定器(20)は判定時間を超えて静止状態が継続しているか否かを判定する。総和平均器(34)は、静止状態と判定された期間のn個のデータのうち、終了タイミング直前のi個のデータを除いた(n−i)個のデータの総和平均を算出して零点オフセットとする。零点補正器(36)は、出力値を零点補正して出力器28に出力する。 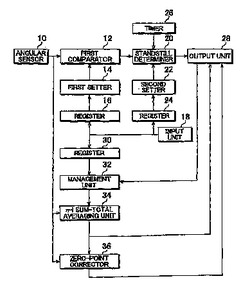 (もっと読む)
(もっと読む)
加速度センサの補正装置および加速度センサの出力値補正方法
姿勢角演算器(14)は、加速度センサ(10)の出力値からロボットの姿勢角を演算する。姿勢角比較器(16)は、レジスタ(20)に設定された特定姿勢における姿勢角と検出された姿勢角とを比較し、その差を補正値演算器(18)に出力する。補正値演算器(18)は差を解消するように零点補正器(26)あるいは感度補正器(28)に補正値を出力する。レジスタ(20)に設定される姿勢角は、入力器(22)から設定してもよい。  (もっと読む)
(もっと読む)
車両挙動制御装置
【課題】ヨーレートセンサのゼロ補正ずれによる不適切な挙動制御を防止しつつ、ヨーレートセンサのゼロ補正出力が得られない場合でも適切な挙動制御が行える車両挙動制御装置を提供すること。
【解決手段】ヨーレートセンサ5を用いて車両の挙動制御を行う車両挙動制御装置であって、車両の停止中にヨーレートセンサ5のゼロ点出力を演算し(S30)、車両の走行中にヨーレートセンサ5のゼロ点出力を演算し(S26)、停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超える場合には停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超えない場合に比べて挙動制御開始しきい値を高く設定する(S48)。これにより、ヨーレートセンサ5のゼロ点補正が適切に行われていないおそれのある場合には、挙動制御開始しきい値が高く設定され挙動制御に入りにくくなり、不適切に挙動制御が行われることを防止できる。
(もっと読む)
携帯端末装置、携帯端末システム、キャリブレーション方法
【課題】 方位センサのキャリブレーションを正確に行うことができる、携帯端末装置および携帯端末システムを提供する。
【解決手段】 方位センサを有する携帯端末装置1は車内に設置したホルダ3に固定し、カーナビゲーション装置2と通信ケーブル4で接続する。携帯端末装置1はカーナビゲーション装置2で検出した方位情報を受信し、受信した方位情報が90度以上になった時点で方位センサのキャリブレーションを開始する。また、キャリブレーションでは、携帯端末装置1の方位センサで検出した磁場データだけでなく、カーナビゲーション装置2から受信した信頼性の高い方位情報も使用する。
(もっと読む)
携帯情報端末および地磁気センサの補正用プログラム
【課題】 本体を回転させることなく、搭載される地磁気センサのオフセットの補正を行うことができる携帯情報端末および携帯情報端末の制御装置に組み込まれる地磁気センサの補正用プログラムを提供する。
【解決手段】 図(a)に示すように、表示部18aにおいて、現在地の景観に対して傾斜して地図MAPaが表示されている携帯電話機MPがユーザに携帯され、左回転の指示の機能が割り当てられているカーソルキー9aが押下され、地図MAPaが左に回転する。その後、地図MAPaが、図(b)に示す地図MAPbのように、現在地の景観と一致して表示されるようになる。そして、地図と現在地の景観とが一致したことがユーザに確認されると、カーソルキー9aが開放され、確認ボタン10が押下され、地図が回転した量がオフセット値として採用される。
(もっと読む)
加速度の較正方法、及びナビゲーション装置
【課題】 加速度センサの出力値と基準値とに基づいて加速度を求めるナビゲーション装置で、加速度センサの出力値の基準値を精度良く得ることによって加速度を較正する方法、及びナビゲーション装置を提供する。
【解決手段】 加速度測定部2を備えるナビゲーション装置1は、略水平に作られていることが多い交差点に自動車が停止したときに加速度センサ21の出力値を取得し、取得した出力値を記憶し、記憶した複数の出力値を平均することによって、自動車が水平に静止している状態での加速度センサ21の出力値である基準値を計算する。またナビゲーション装置1は、同一の交差点で自動車の進行方位が互いに対向する方位である状態で取得した二つの出力値に対して重み係数を設定しておき、基準値を計算する際に重み係数で重み付けした出力値の重み付け平均を行う。
(もっと読む)
81 - 100 / 104
[ Back to top ]