
Fターム[2F129BB45]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075)
Fターム[2F129BB45]の下位に属するFターム
Fターム[2F129BB45]に分類される特許
61 - 80 / 86
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 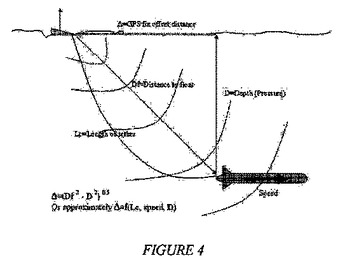 (もっと読む)
(もっと読む)
干渉および電波妨害に対する感受性を低減したナビゲーションシステムのための方法および装置
ナビゲーションシステムは、GPSへのあらゆる形の干渉または電波妨害に対する著しいレベルの保護を、コスト効率のよい方法で提供する。このシステムは、GPSと組合せた地上基準局および地球低軌道(LEO)衛星のネットワークを採用する。基準局とユーザとをリンクする、GPS衛星への共通視野測距ジオメトリが、設定される。同じ対の基準局とユーザとの間のLEO衛星への第2の共通視野ジオメトリも設定される。地上局は、GPS、LEO衛星の信号の搬送波位相測定を行なうことにより、リアルタイムの支援信号を合成する。この支援情報はLEO衛星を介して、周囲の電波妨害を貫通するように高出力でユーザ受信機に送信される。ユーザ受信機は、LEO衛星の搬送波位相を追尾し、支援情報を復調して、次に、GPS信号の拡張された一貫した測定を可能にするように搬送波位相測定値および支援情報を適用する。このシステムはそれにより、電波妨害で失われたであろうGPS信号を復元させる。 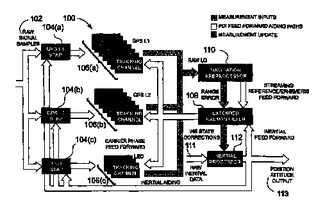 (もっと読む)
(もっと読む)
ナビゲーション装置、その制御方法及びプログラム
【課題】ナビゲーションの技術において、映像素子からの画像をもとに簡明な解析手法で道路上の信号機を高精度に検出すること。
【解決手段】高さ取得手段42が、30秒毎、10秒毎のように複数の時点について、映像素子15から得たそれぞれの画像を解析することにより、信号機の点灯色を抽出し、その画像中における高さ情報を取得する(高さ取得処理)。信号機検出手段44が、前記複数の時点について、高さ取得手段42で得たそれぞれの前記高さ情報と、その時点の間における自車の走行距離と、に基いて信号機を検出する(信号機検出処理)。
(もっと読む)
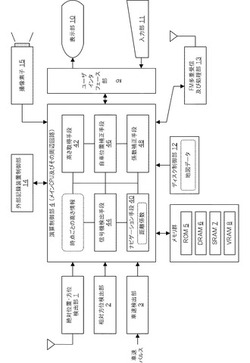
車両方位補正システム

【課題】方位を適切に補正することが可能な「車両方位補正システム」を提供する。
【解決手段】車両方位補正システム100−1は、車両の近傍範囲と、該近傍範囲よりも遠方の遠方範囲とを周期的に撮影するカメラ102と、車度を検出する車速センサ108と、車両の角度変化を検出するジャイロセンサ110と、撮影タイミングの異なる2つの近傍範囲の画像の相関、及び、撮影タイミングの異なる2つの遠方範囲の画像の相関と、車速とに基づいて、車両が停止、回転及び走行のいずれかの状態であるかを判定し、回転及び走行のいずれかの状態である場合に、車両の角度変化に基づいて、車両の方位を補正する仮判定部104及び判定・補正部112とを有する。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 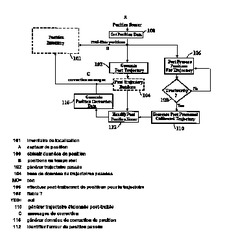 (もっと読む)
(もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム
【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】静止時及び微速移動時において、信頼性を有し、かつ、精度の高い位置を出力することができる測位装置等を提供すること。
【解決手段】測位衛星からの信号である衛星信号に基づいて、測位を行う測位装置20であって、参照位置Pを保持する位置保持手段と、測位装置20の移動状態を判断する移動状態判断手段と、移動状態に基づいて、参照位置Pと、測位によって算出した現在の測位位置Pg(n)を平均化して平均位置を算出する平均位置算出手段と、平均位置を出力する位置出力手段と、平均位置を参照位置Pとして位置保持手段に格納する位置格納手段と、を有する。
(もっと読む)
移動体位置推定システム、及び、移動体位置推定方法
【課題】 移動体の位置を高い精度で推定可能な移動体位置推定システム及び移動体位置推定方法を提供する。
【解決手段】 移動体位置計測装置から移動体の位置情報を取得すると、当該位置情報を用いて地図データの座標系に分散するパーティクルをサンプリングするパーティクルフィルタを備え、当該パーティクルフィルタによりサンプリングしたパーティクルから当該移動体の位置を推定する移動体位置推定システム及び移動体位置推定方法であり、当該地図データの座標系上の各領域に当該移動体が存在する確率を示す確率データを有し、当該確率データに従って当該地図データの座標系にパーティクルを分散させることにより、移動体の位置を高い精度で推定する。
(もっと読む)
位置データ取得装置
【課題】取得した現在地の位置データを的確に補正する。
【解決手段】ユーザ携帯電話2のシャッタボタン6を操作すると、制御部3は、撮影を行うとともに、GPS算出部8にプログラム起動信号を出力し、GPS算出部8は、ユーザ位置データを算出する。そして、制御部3は、アンテナ7を介して、ユーザ携帯電話2の外部に向けて位置データ取得指令信号を発信する。現在地の位置データを取得する機能を有する第1,第2周辺携帯電話11,12は、位置データ取得指令信号を受信すると、得した第1,第2周辺位置データを第1,第2取得データ信号に変換して外部に向けて発信する。アンテナ7で第1,第2取得データ信号を受信すると、制御部3は、第1,第2周辺位置データとユーザ位置データとの平均値を算出し、算出した平均位置データを撮影した画像データに記憶した後、画像データをメモリ9に記憶する。
(もっと読む)
車載用ナビゲーション装置
【課題】安定的に、しかも安価な方法で自車位置を修正できる車載用ナビゲーション装置を提供する。
【解決手段】自車の位置および方位を計算する自車位置方位計算部4と、地図データを格納した地図データベース6と、路面を撮影するカメラ10と、カメラからの路面の映像に含まれる交差点前後の道路標示に基づき交差点への進入位置および交差点からの離脱位置を認識する交差点進入離脱認識部12と、認識された進入位置および離脱位置と、地図データベースからの地図データで示される、該交差点において自車の直進方向に交差する道路リンクとの幾何学的計算により自車位置の前後方向のずれを計算する交差点道路比較部13と、地図データと計算されたずれとに基づき、自車の位置および方位を修正する自車位置方位修正部5と、自車位置方位修正部で修正された自車の位置および方位に基づきナビゲーションを行うナビゲーション制御部7とを備えている。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム
【課題】前回の測位位置が現在位置と大きく異なる場合であっても、マルチパスを確実に排除することができる測位装置等を提供すること。
【解決手段】高信頼度衛星HSVを含む基準衛星群BSを生成する基準衛星群情報生成手段と、基準衛星群BSを使用して基準位置BPを示す基準位置情報を生成する基準位置情報生成手段と、第1擬似距離と第1近似距離との差分である第1差分を算出する第1差分算出手段と、第1差分が、直接波に対応する範囲として予め規定した第1測位使用可能範囲内か否かを判断する第1測位使用可能性判断手段と、第1測位使用可能範囲内の第1差分に対応する通常衛星と高信頼度衛星を構成要素とする第1測位使用衛星群を生成する第1測位使用衛星群生成手段と、第1測位使用衛星群を使用して測位を行い、出力用の測位位置を示す測位位置情報を生成する第1測位位置情報生成手段等を有する。
(もっと読む)
経路案内システム及び経路案内方法
【課題】車両を円滑に走行させることができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、前記自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、前記探索経路に基づいて、走行するのが推奨される推奨レーンを設定する推奨レーン設定処理手段と、自車が走行しているレーンを特定する走行レーン特定処理手段と、推奨レーン及び走行レーンに基づいて、レーン単位の案内を行うレーン案内処理手段と、レーン案内に従って、自車が推奨レーンに進入したかどうかを判断する推奨レーン進入判定処理手段と、自車が推奨レーンに進入したかどうかによって、異なる経路案内を行う経路案内処理手段とを有する。レーン案内が開始された後、車両の走行状態に対応させて経路案内を行うことができる。
(もっと読む)
固体の移動を推定するための方法
本発明は、3つの変数ベクトルによって定義される外乱を生成しうる媒体における固体移動体による方法であり、移動は、6つの変数ベクトルによって定義され、固体は、少なくとも3つの感度軸を有する加速度を感知する少なくとも1つのセンサと、少なくとも3つの感度軸を有する磁界を感知する少なくとも1つのセンサと、を備える。固体の移動を推定するための本発明の方法は、6つの変数の移動ベクトルと、3つの変数の外乱ベクトルからなる9つの変数ベクトル(Λ)を計算するステップ(B6)と、9つの変数ベクトルを推定されることになっている最大で5つの変数を有するベクトルに変換することができる9つの変数ベクトル(Λ)に重み付けを行うステップ(B6)と、を含む。 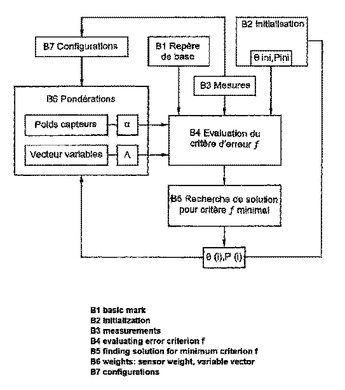 (もっと読む)
(もっと読む)
位置測位装置、および位置測位方法
【課題】車両に搭載されるシステムにおいて、高精度に現在位置を算出する。
【解決手段】位置測位システムに、道路標示を示すパターン情報と、パターン情報に対応付けられた道路標示の特徴点をワールド座標で示した位置情報とを登録する道路標示情報DB105と、車両の暫定現在位置を算出する測位処理部103と、車両の前方を撮像する車載カメラ107と、撮影した画像および道路標示情報DB105に登録されているパターン情報を用いて撮影した画像の中に道路標示が在るか否かを判定し、画像の中にある道路標示の特徴点を抽出する画像処理部104と、車両を基準に特徴点の座標を算出し、車両を基準にした特徴点の座標、および道路標示情報DB105の中の抽出した特徴点に対応する特徴点の位置情報を用いて現在位置を算出する位置計算部102と、を設ける。
(もっと読む)
車両停止検出装置、カーナビゲーション装置
【課題】 車両停止検出装置において、従来よりも高精度に車両の停止を検出する。
【解決手段】 領域抽出部2が、バックカメラ20で撮像された時系列の複数の画像S0のうち、所定の近傍画像Sをそれぞれ抽出し、特徴量算出部3が、この時系列の複数のうち最新の近傍画像Sについてコントラストを表す特徴量J1を算出し、また、複数の近傍画像S間での差異を示す特徴量J2を算出し、判定部4が、両特徴量J1,J2に基づいて、車両200の停止を判定することにより、車両の停止を精度よく検出する。
(もっと読む)
ナビゲーション装置
【課題】旋回動作の多い駐車場内でも、精度よく車両方位を求めるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、駐車場内の誘導路や駐車スペースが、一般的に、隣接する道路方位αに対して同じ向きか、又はα+90°、α+180°若しくはα+270°であることを利用して車両方位を修正する。具体的には、ナビゲーション装置は、方位の変位を積算して車両方位を求める車両方位算出手段と、現在位置が駐車場内に在るか否かを判定する手段と、現在位置が駐車場内に在ると判定された場合、当該駐車場に入る前に現在位置が存在した道路の方位α、α+90°、α+180°及びα+270°のうち車両方位算出手段で算出した車両方位に最も近い方位に当該車両方位を修正する手段とを備えている。
(もっと読む)
車両の走行支援装置
【課題】運転者の所望する走行軌跡に沿った目標進行路を比較的簡単に構築することができるようにする。
【解決手段】基準局4を駐車スペースの近くに設置し、基準局4の通信可能エリア内で自車両1を走行させることで駐車スペースまでの走行データを取得し(S2)、取得した走行データに基づいて生成したノード列βと前回の生成したノード列αとのノード数αn,βnを比較し、少ないノード数αn(或いはβn)のノード列α(或いはβ)を基本ノード列κとして設定し(S5)、基本ノード列κのノード点を基準に他方のノード列β(或いはα)の距離差が最小のノード点を選択し(S7)、この両ノード点の平均値で、基本ノード列κのノード点を学習し(S8)、学習ノード列γを生成する(S9)。そして、この学習ノード列γに基づいて駐車スペースまでの目標進行路を生成し自車両1を自動操縦制御させる。
(もっと読む)
移動体測位システム
【課題】高い測位精度と高い測位率を備えた移動体測位システムを得る。
【解決手段】GPS衛星からのC/Aコードを用いて測位する測位方式により周期的にコード受信機測位情報を出力する1周波コード受信機と、前記GPS衛星からの搬送波位相を観測する測位方式により前記コード受信機測位情報と同期してキャリア受信機測位情報を出力する2周波キャリア受信機と、前記コード受信機測位情報と前記キャリア受信機測位情報を入力し測位データを出力するデータ補完処理装置とを備え、前記データ補完処理装置は、ある測位時刻において前記キャリア受信機測位情報に基いて測位データを測位することが不能であるときに、測位データを測位することができた直近の測位時刻における前記キャリア受信機測位情報に基く測位データと前記コード受信機測位情報とを用いて、測位データを補完するようにした。
(もっと読む)
車載用情報処理装置、その制御方法及び制御プログラム
【課題】 自車両の位置精度を向上できる車載用情報処理装置、その制御方法及び制御プログラムを提供すること。
【解決手段】 検出された自車両の位置精度を示す精度評価指標を算出(ステップS1)し、この精度評価指標が所定の閾値を超えた場合、車両間通信手段を介して、位置精度の高い他車両から、この他車両の位置と、当該他車両と自車両との車両間距離とを取得(ステップS4、S5)し、これら他車両の位置及び車両間距離に基づいて、自車両の位置を推定し(ステップS6)、この推定した位置を自車両の位置として更新する(ステップS7)。
(もっと読む)
位置検出システム、携帯端末、位置検出方法及びプログラム
【課題】歩行者が屋外にいる場合であっても屋内にいる場合であっても正確な位置情報を取得することができる位置検出システム、携帯端末、位置検出方法及びプログラムを提供する。
【解決手段】データベース10は無線タグ2、5のタグIDとその無線タグ2、5が設置されている位置の位置情報とを対応付けて記録するとともに、位置情報と地図情報とを対応付けて記録する。また、携帯端末6はGPS衛星7からの電波を受信して位置情報を取得する。また、携帯端末6は無線タグ2、5からタグIDを取得してデータベース10を参照することにより位置情報を取得する。携帯端末6は、GPS衛星7から受信した電波により求めた位置情報と、無線タグ2、5から受信したタグIDにより求めた位置情報の少なくとも一方の位置情報に基づいてデータベース10から地図情報を取得し表示する。
(もっと読む)
61 - 80 / 86
[ Back to top ]