
Fターム[2F129BB46]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | DGPS (289)
Fターム[2F129BB46]に分類される特許
281 - 289 / 289
ナビゲーション装置及びナビゲーション方法
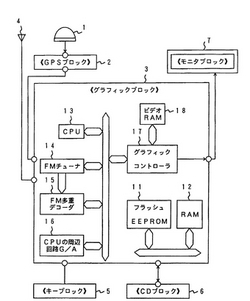
【課題】1台のFM多重チューナにより受信周波数が異なる場合でもD−GPSとVICSのデータをほぼ同時に受信する。
【解決手段】地図データを記憶したCD−ROMを装着したCDブロック6 と、GPSアンテナ1 を接続して現在位置を測位するGPSブロック2 と、FMアンテナ4 を接続してFM放送電波を受信するFMチューナ14と、FM放送電波に多重化されたデータをデコードするFM多重デコーダ15と、FMチューナ14及びFM多重デコーダ15により交通情報のデータ及び上記複数の衛星から受信される信号の誤差情報のデータの一方を受信させ、同一周波数で他方のデータも受信できない際には周波数を変えて該他方のデータを受信させるCPU13と、得た交通情報及び誤差情報のデータを用いてCDブロック6 からの地図データを加工してモニタブロック7 で表示させるグラフィックコントローラ17とを備える。
(もっと読む)
位置測位装置を有する移動体情報端末

【課題】 CPUの負荷に応じて測位部を選択し、CPU負荷の分散、軽減を図る。また、場面に応じて必要とする測位精度の測位部を選択する。
【解決手段】 GPS測位部20は、第1測位部21と第2測位部22とを備える。第1測位部21は準天頂衛星から高精度測位情報を受信し、高精度測位情報に基づき、第2測位部22よりも精度の高い高精度測位方式で測位する。第2測位部22はGPS単独測位を行なう。切替部24は2つの測位部を選択的に切り替える。切替部24は、判定部30が出力する判定信号に従い測位部を切り替える。判定条件設定部33は判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は入力した判定条件信号と車速検知部90等から入力される判定対象信号81等に基づきどちらの測位部を選択するかの判定を行う。選択判定部34は判定結果を判定信号として切替部24に出力する。
(もっと読む)
自動地上走行管理
【課題】
【解決手段】輸送体を所定の箇所に移動させる方法は、可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の箇所と所定の中継地との間で障害物がないかどうかを判断する工程と、可能性のある地上走行ルートに障害物がなければ、輸送体を中継地に地上走行させる工程を有する。本方法を実行する装置もまた、提供される。
(もっと読む)
施設表示装置
設定受付部1により設定された表示方法にしたがって施設特定部6により特定された施設の画像を広域地図に3次元表示してから、その施設の画像をズームアップする。また、ズームアップと同時、あるいは、ズームアップの完了後に施設の画像を回転させる。これにより、施設の位置を大まかに確認してから、施設の全体像を把握することができるようになる。 (もっと読む)
2周波数の一方で測定データが利用できない場合に短期間バックアップ2周波数ナビゲーションを行なう方法
本発明は、2周波数ナビゲーションが依存する2周波数の一方が利用できない場合に、短期間バックアップ2周波数ナビゲーションを実行する方法を含んでいる。本方法は、維持されている周波数上の搬送波位相測定値および電離層屈折効果のモデルを用いて、利用できない周波数上の符号および搬送波位相測定値を合成して、両方の周波数上の測定値が利用できる場合に更新するステップを含んでいる。 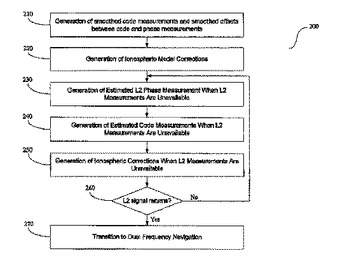 (もっと読む)
(もっと読む)
移動プラットフォームの衛星ベースの相対測位のための方法および装置
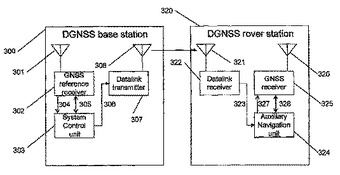
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
自動二輪車用の走行情報蓄積方法および走行情報蓄積システム
【課題】 自動二輪車の走行支援のために適切なバンク角を記憶できる自動二輪車用の走行情報蓄積方法を提供する。
【解決手段】 自動二輪車の走行情報を蓄積する方法であって、自動二輪車の座標データを得る工程(S10)と、自動二輪車の左右バンク角を算出する工程(S20)と、前記座標データと前記左右バンク角とをリンクして記憶する工程(S30)とを包含する、自動二輪車用の走行情報蓄積方法である。
(もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 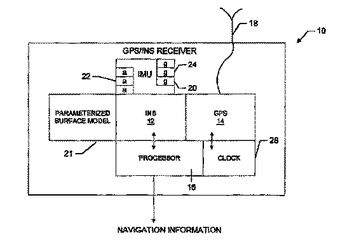 (もっと読む)
(もっと読む)
車両監視システム
【課題】複雑さや実質的なコスト増大をもたらすことなく、従来の欠点を克服する車両監視システムを提供する。
【解決手段】車両監視システムは、電子アクセスカード100と、カードリーダ312と、車両トランシーバ330とを備え、電子アクセスカード100は、電子アクセスカード100のユーザーと関連する情報を蓄積し、カードリーダ312は、電子アクセスカード100を受け入れて、関連する情報を読み出し、さらに車両トランシーバ330はカードリーダ312に接続される。この車両トランシーバ330は、関連する情報の少なくとも一部を、監視局416および携帯ユニット428の少なくとも一方に伝送する。さらに、監視局416および携帯ユニット428のそれぞれは、関連する情報を表示するコンピュータ419を備えている。
(もっと読む)
281 - 289 / 289
[ Back to top ]