
Fターム[2F129BB46]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | DGPS (289)
Fターム[2F129BB46]に分類される特許
101 - 120 / 289
位置特定装置、コンピュータプログラム及び位置特定方法

【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性があるか否かを判定する。可能性の有無は、例えば、歩行の開始、歩行の停止、歩行速度の変動等により判定することができる。位置特定部174は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性がある場合、歩行挙動と交差点に設置された信号機の信号切替タイミング又は踏切に設置された警報タイミングとが合致するか否かを判定し、合致する場合には、歩行者の位置を横断歩道付近又は踏切付近に特定する。例えば、横断歩道を有する交差点に設置された信号機の青信号点灯開始時点に、歩行挙動が歩行開始であるとき、歩行者の位置を横断歩道付近に特定する。
(もっと読む)
方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法

【課題】歩行者の移動方向の方位を精度良く特定することができる方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法を提供する。
【解決手段】位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性(例えば、道路領域)と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、位置更新部175で歩行者の位置を道路上に特定した場合、測位方位をその特定位置の道路方位に補正することにより、歩行者の移動方向の方位を特定する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】位置推定部171は、前回に算出された推定位置又は検出位置から測位位置までの測位軌跡に沿った軌跡を求めることにより、推定位置の軌跡及び推定位置を算出する。誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。属性判定部173は、誤差算出部172で算出した推定位置の誤差範囲内に存在する地図上の領域の属性を判定する。位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。
(もっと読む)
改善されたナビゲーション装置及び方法
比較的弱いGPS信号のみが利用可能な場合の、ナビゲーション装置(500)の位置を決定する方法と、このような状況で自身の位置を決定できるナビゲーション装置とが説明される。この方法は、複数のGPS衛星(51−54)から複数のGPS信号(502)を受信する工程と、衛星のそれぞれに特有の識別情報とともに信号の一部を構成するタイミング情報から、距離情報を決定する工程と、信号のそれぞれの一部をさらに構成する、衛星のそれぞれに特有の軌道歴データペイロードの全体を受信及び格納することを試みる工程とを含む。この方法はさらに、無線通信プロトコルを用いて、近傍の装置(508)との通信(510)を確立する工程と、近傍の装置が、特定された衛星についての衛星位置に関する軌道歴データ又は軌道歴データの特定の部分を、既に格納していることを判定する工程と、特定された衛星についての軌道歴データ又は軌道歴データの特定の部分を、要求及び受信する工程と、ナビゲーション装置が続けて、距離情報と、距離情報が決定された衛星に特有の無線で受信された軌道歴データと、を用いてナビゲーション装置の位置を決定する工程と、を含むことを特徴とする。 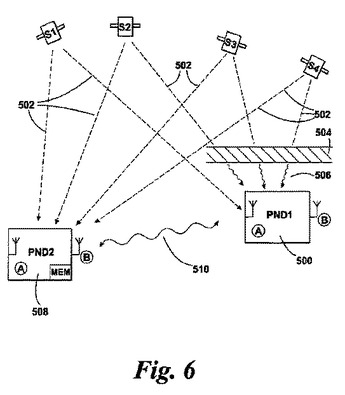 (もっと読む)
(もっと読む)
道路白線検出方法、道路白線検出プログラムおよび道路白線検出装置
【課題】道路白線を精度良く検出することの可能な道路白線検出方法を提供する。
【解決手段】時刻tiにおける観測値m(j)と、推定値Xd(j)および誤差共分散Cxd(j)の時刻tiにおける初期値と、時刻tiにおけるカルマンゲインKd(j)とを求める(ステップS107,S108,S109)。次に、観測値m(j)と、カルマンゲインKd(j)とに基づいて、時刻tiにおける推定値Xd(j)を更新すると共に(ステップS110)、カルマンゲインKd(j)に基づいて、時刻tiにおける誤差共分散Cxd(j)を更新する(ステップS111)。次に、更新した推定値Xd(j)および誤差共分散Cxd(j)を用いて上記のステップS109〜S111を複数回、繰り返し実行し、時刻tiにおける道路白線の位置座標としての推定値Xd(j)を導出する(ステップS112)。
(もっと読む)
ナビゲーション装置
【課題】景勝道路を経由する案内経路を探索する際に景勝道路の走行区間や出入口の設定等に対して煩雑な手間がかかることを防止して、容易かつ適切に案内経路を探索する。
【解決手段】ナビゲーション処理部42は、入力操作部14に対する操作者の入力操作に応じて目的景勝道路が設定されている場合には、目的景勝道路に対応する景勝道路の情報、および、景勝道路の出入口の情報からなる景勝道路情報を、景勝道路データ記憶部13から検索し、現在位置に近い入口(例えば、現在位置に最も近い入口)と目的地に近い出口(例えば、目的地に最も近い出口)とを取得し、これらの入口と出口との間の景勝道路の走行区間を経由して現在位置から目的地に到る経路を探索する。
(もっと読む)
GPS測位装置及びGPS測位方法
【課題】GPS受信機側に新旧の衛星情報が混在する場合であっても、適切な測位演算が可能なGPS測位装置及び測位方法を提供することを目的とする。
【解決手段】複数のGPS衛星から定期的に受信した前記複数のGPS衛星の各々の最新の衛星情報を記憶する衛星情報記憶手段と、前記衛星情報記憶手段により記憶された前記複数のGPS衛星の各々の最新の衛星情報に、最新の衛星情報と最新ではない前回受信時の衛星情報が混在して記憶されているか否かを判断する新旧混在判断手段と、前記新旧混在判断手段による判断結果に応じて、当該GPS測位装置の位置座標を測位演算する測位演算手段とを有することを特徴とするGPS測位装置。
(もっと読む)
交通規制回避区域提供装置、その制御方法及びその制御プログラム
【課題】自車位置が交通規制情報を有する区域内にある場合でも自動的に最寄の交通規制回避区域を通知し、案内可能な交通規制回避区域提供装置、その制御方法及び制御プラグラムを提供する。
【解決手段】自車位置検出部31は、自車の現在位置情報を測位部14や車両情報取得部12の車速センサ12aから逐次計算し検出する。駐停車禁止区域判定部32は、自車位置検出部31により検出した自車位置が駐停車禁止区域内にあるか否かを判定する。駐車場検索部33は、駐停車禁止区域判定部32により自車位置が駐停車禁止区域内にあると判断された場合に、当該自車位置近傍の駐車場を自動検索する。駐車判定部34は、車両が駐車しているか、又は駐車する意思があるかを判定する。経路計算部35は、駐車判定部34により車両の駐車、あるいは駐車の意思が判定された場合に、自車位置から検索された駐車場までの経路候補を算出する。
(もっと読む)
測位システムおよび車載装置
【課題】車両の走行時における測位精度を向上させること。
【解決手段】車載装置は、測位した座標を表す車載側測位座標を含む車載側測位データを取得する車載側測位手段と、車載側測位手段が取得した車載側測位データを携帯端末装置へ送信する送信手段とを備え、携帯端末装置は、測位した座標を表す携帯側測位座標を含む携帯側測位データを取得する携帯側測位手段と、車載側測位手段および/または携帯側測位手段を測位環境に基づいて選択する選択手段と、選択手段によって選択された測位手段に係る測位座標に基づいて前記車両位置を算出する車両位置算出手段とを備えるように測位システムを構成する。
(もっと読む)
地図表示装置、その制御方法及びその制御プログラム
【課題】車両が交通規制情報を有する区域内にあると判定された場合に、この交通規制情報を有する区域全体を地図上において識別性の高い態様で表示させることで当該区域内への駐停車を抑止可能な地図表示装置、その制御方法及び制御プログラムを提供する。
【解決手段】駐停車禁止区域判定部32は、現在位置検出部31により検出した現在位置が、駐停車禁止区域内にあるか否かを判定する。駐車判定部33は、車両が実際に駐車しているか、あるいは駐車する意思があるかを判定する。表示制御部34は、駐停車禁止区域判定部32により現在位置が駐停車禁止区域内にあると判定された場合に、当該現在位置が存在する駐停車禁止区域を他の区域と識別可能な表示態様で表示案内部7に出力し、表示させる。
(もっと読む)
衛星測位装置
【課題】途切れなく測位を行うことのできる「衛星測位装置」を提供する。
【解決手段】P1まで進行した時点で、ナビゲーション装置11によって、近い将来の上方閉塞空間への進入が予測されたならば、アシスト測位制御部15は、無線通信装置17とGPS受信機16を制御して、GPS受信機16と測位サーバ4との接続を確立する。そして、その後、地点Sで上空閉塞空間400に進入し、上空閉塞空間400内をP2まで進んだ時点で、GPS受信機16のCN比が劣化し所定のしきい値TH未満となったならば、アシスト測位制御部15は、GPS受信機16にアシスト測位モードを設定する。アシスト測位モードを設定された、GPS受信機16は、地点P1で既に接続が確立している測位サーバ4から補助データの取得を直ちに開始して、ネットワークアシスト方式の測位を行う。
(もっと読む)
ナビゲーション装置
【課題】目的地が設定されている状態で新たに追加される目的地を検索する際に、操作者の所望の目的地を適切に検索する。
【解決手段】ナビゲーション処理部42は、操作者による入力操作部14の入力操作等によって、既に取得された目的地に基づく検索範囲パラメータの近傍に存在する施設を新たに追加される目的地として検索する際に、既に取得された適宜の1つの目的地の位置を検索範囲パラメータとして設定する周辺検索、または、既に取得された適宜の2つの目的地の間の経路を検索範囲パラメータとして設定する地点間検索を実行する。
(もっと読む)
ナビゲーション装置
【課題】目的地を適切に設定する。
【解決手段】ナビゲーション処理部42は、入力操作部14に対する操作者の入力操作等に応じて、表示装置51の表示画面に表示されている地図におけるポリゴン上の任意の位置が目的地として操作者により指定された場合、予め地図データ記憶部12に記憶されたポリゴンに対応する施設名を用いて、予め施設データ記憶部13に記憶された施設名および施設名に対応付けられた施設位置(例えば、施設に具備される駐車場の座標、または、施設の入り口の座標等)を検索することで、操作者により指定されたポリゴンに対応する施設名に対応付けられた施設位置を抽出し、抽出した施設位置を目的地として設定する。
(もっと読む)
情報処理システム、情報処理方法および情報処理プログラム
【課題】作成した制御データに基づいて位置を測位し、表示する情報処理システムを安価かつ容易に提供する。
【解決手段】情報処理システム1は、制御データに基づいて測位衛星からの衛星信号を受信し、受信した衛星信号から測位データを取り出して出力するGPS受信手段54と、出力された測位データが示す位置を表示する位置情報表示手段18と、衛星信号の受信を制御するための制御データを作成し、作成した制御データをGPS受信手段54に送り設定するGPSアシストデータ取得・設定手段20と、位置情報表示手段18およびGPSアシストデータ取得・設定手段20の何れか1つとGPS受信手段54との間で、測位データおよび制御データの何れか1つを授受可能に接続するUSBホスト手段14と、GPS受信手段54との接続をUSBホスト手段14に対して指示する制御手段12とを備える。
(もっと読む)
ナビゲーション装置およびデータ更新方法
【課題】所望のナビゲーション動作を確保しつつ、ナビゲーションデータの更新に要する時間を短縮する。
【解決手段】更新処理部44は、ナビゲーション処理部42によるナビゲーション動作の実行を停止して、可搬記憶媒体からナビゲーションデータ取得部13により取得されるナビゲーションデータのうち、少なくとも現在位置検出部11によって検出された車両の現在位置周辺を含む第1の領域(全力更新領域)に係るナビゲーションデータにより、ナビゲーションデータ記憶部12に記憶されたナビゲーションデータを更新する第1の更新処理(全力更新)と、全力更新が終了した後に、全力更新領域以外の第2の領域(並列更新領域)に係るナビゲーションデータの更新を、ナビゲーション処理部42によるナビゲーション動作の実行と並行して行う第2の更新処理(並列更新)とを実行可能である。
(もっと読む)
ナビゲーション装置
【課題】複数の目的地の設定に要する時間が過剰に長くなることを防止しつつ、複数の目的地を設利する際の利便性を向上させる。
【解決手段】ナビゲーション処理部42は、操作者による入力操作部14の入力操作等によって、既に取得されている目的地に対して新たな目的地が追加された場合あるいは複数の経由地の経由順序が変更された場合に、経由順序に応じた経路の探索処理が実行されるより前のタイミングで、現在位置および全ての目的地の位置が表示された単一の地図画像を、各目的地の経由順序を示す数字等の画像と共に表示装置51の表示画面に表示させる。
(もっと読む)
測位システム、供給装置、端末装置、測位システムの制御方法及び測位システムの制御プログラム
【課題】端末装置を保持してユーザが海外など長距離を移動した場合、移動先において、位置情報衛星の捕捉や位置計算等に用いる初期位置等の情報を容易に得ることができる。
【解決手段】測位システム10では、供給装置40を例えば空港や駅等の施設に設置する。ユーザが、端末装置20を供給装置40のICチップリーダ/ライタに近づけると、供給装置40は測位サーバ60から、LTEモデル情報及び時刻により構成される第1の支援情報を受信する。そして、供給装置40において初期位置を付加して第2の支援情報を生成し、この第2の支援情報を端末装置20に備えたICチップに書き込む。
(もっと読む)
飛翔体の測位装置
【課題】飛翔体が長時間にわたって加速を続けると、信号処理の基準周波数を発生する基準発信器において加速度による周波数ドリフトが生じるという問題があった。
【解決手段】飛翔体に搭載され且つ複数のGPS衛星からの信号を受信して自己の位置を測位する飛翔体の測位装置であって、基準周波数を発生する基準発信器12と、飛翔体に生じた加速度を計測する加速度計13と、加速度計13で計測した加速度に対応する基準発信器の周波数ドリフトを算出する第1補正手段14を備え、第1補正手段14により、算出した周波数ドリフトに基づいて実際に生じた基準発信器12の周波数ドリフトをキャンセルすることで、加速度により生じる基準発信器12の周波数ドリフトを解消した。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】車線変更の走行制御又は情報提供を行うことにより、自車両が安全に交差点を通過することができる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】運転支援装置は、自車両の位置、前方車両又は後方車両との車間距離などを測位しつつ、通信装置20から受信した車両情報を探索して車両情報で示される車両の中から自車両、前方車両及び後方車両を特定する。運転支援装置は、自車両及び前方車両それぞれの交差点までの距離及び速度並びに信号情報に基づいて、自車両及び前方車両が交差点の手前に停止する停止条件及び交差点に進入する進入条件により決定される特定の状態にあるか否かを判定し、判定結果に基づいて、自車両の車線を変更するか否かを判定する。
(もっと読む)
車両位置特定システム、車載機及び送信機
【課題】自車の走行位置を精度良く特定することができる車両位置特定システム、車載機及び送信機を提供する。
【解決手段】車載機30は、送信機20から信号を受信した場合、信号の到達時間を算出し、到達時間に光速を積算して、送信機20からの距離を算出する。車載機30は、自車位置が送信機20の位置を中心とする球面上であることがわかる。車載機30は、自車両が走行する道路(リンク:交差点間の道路)の道路形状情報及び車載機30の高さ情報を組み合わせることで、仮想的な走行面を特定する。車載機30は、自車位置を球面と走行面とが交わる交線として特定する。
(もっと読む)
101 - 120 / 289
[ Back to top ]