
Fターム[2F129BB47]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | ハイブリッド (898)
Fターム[2F129BB47]に分類される特許
201 - 220 / 898
ナビゲーションシステムおよび車載装置
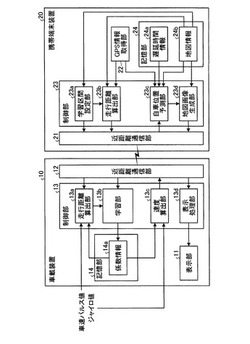
【課題】自車両の状態変化によって自車位置の予測精度が低下することを防止しつつ、車載装置によって表示される自車位置と実際の自車位置とのずれを低減すること。
【解決手段】車載装置の走行距離算出部が、自車両から出力される車速パルスと車速算出用係数とを用いて算出される自車速度に基づき、所定区間における第1の走行距離を算出し、携帯端末装置の走行距離算出部が、所定区間における自車両の第2の走行距離を測位衛星から提供されるGPS情報に基づき算出し、学習部が、第1の走行距離と第2の走行距離との比較結果に基づき、車速算出用係数を補正し、携帯端末装置の自車位置予測部が、車速パルスと補正された車速算出用係数とを用いて算出された自車速度に基づき、自車位置を予測するようにナビゲーションシステムを構成する。
(もっと読む)
停車判定装置

【課題】取り付ける車両によらず適切な停車判定を行うことが可能となる停車判定装置を提供する。
【解決手段】フラッシュメモリ28に閾値が設定されていなければ、ROM16bから初期値の閾値を読み出し、ジャイロセンサ12および加速度センサ13の各軸について検出された動き量が読み出された閾値以下の状態が所定時間継続した場合、停車していると判定し、検出された動き量に基づき閾値を決定し、決定された閾値をフラッシュメモリ28に更新記憶させ、次回はフラッシュメモリ28から閾値を読み出して停車判定を行う。
(もっと読む)
参照位置に対する位置の対応を決定するための装置および方法
参照位置(24)に対する位置(21)の対応を決定するための装置(30)であって、固定の無線送信機(22)の無線信号をその位置で受信できることを特徴とし、特定の無線送信機(22e)の識別子を決定するための、そして、第1の時刻(t1)にその特定の無線送信機の無線信号の信号特性を決定するための手段(32)であって、特定の無線送信機の識別子および無線信号の信号特性が、位置(21)のための測定パケット(MP)の少なくとも一部を示すことを特徴とする手段(32)と、位置(21)のための後処理された測定パケット(MP’)を得るために、測定パケット(MP)を後処理するための手段(36)であって、後処理するための手段は、第1の時刻(t1)が、特定の無線送信機(22e)の識別子が決定できた第2の時刻(t2)の前の最後の時間であって、そして、0.5秒以上の第1の時間(Δt)が、第1の時刻と第2の時刻の間にあり、その間特定の無線送信機(22e)の識別子を決定できない、第1の時刻(t1)から第1の時刻(t1)の後の第2の時刻(t2)までの間、特定の無線送信機(22e)の信号特性を少なくとも一時的に合成するために実行されることを特徴とする手段(36)と、対応を決定するために、参照位置(24)のための少なくとも1つの前に決定された参照測定パケット(RP)と、後処理された測定パケット(MP’)を比較するための手段(38)とを含むことを特徴とする装置(30)。 (もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】追加のセンサを用いることなく正確な推定航法を行うことができる車両用推定航法装置を提供する。
【解決手段】走行車両に搭載されたGPS受信機によるGPS情報から当該車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、前記車両に装着されたタイヤ回転情報検出手段から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを算出する第2パラメータ算出手段とを備えている。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
慣性測定ユニット(IMU)のための空間整合判断
本明細書で開示する主題は、慣性測定ユニット(IMU)の空間整合を判断するためのシステムおよび方法に関する。例として、第1のビークルベース方向を識別し、第1のビークルベース方向を地球ベース座標フレームに変換可能な第1の方向に関連付ける方法について説明する。第1の方向に少なくとも部分的に基づいてIMUの空間整合を判断する。 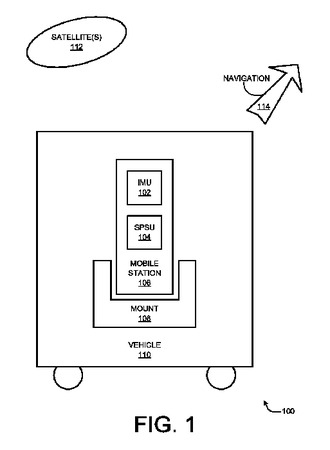 (もっと読む)
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
方位検出装置、方位検出方法および方位検出プログラム
【課題】地磁気を検出して算出された方位情報の精度を判定する。
【解決手段】移動中の方位角を検出する方位検出装置において、地磁気を検出して方位情報を求める磁気センサ2と、この磁気センサ2の移動方向と交差する方向の加速度を検出する加速度センサ3と、この加速度センサ3の検出した加速度データと磁気センサ2の求めた方位情報との整合性を判断し、その整合性の判断により移動する進行方向を決定する方位角決定処理部4とを有する。
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の関数関係を決定。関数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する関数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
車載用電子機器
【課題】スタンバイ状態の暗電流を低減して車両への実装を容易化できる自車方向補正機能を有する車載用電子機器を提供する。
【解決手段】自車方向を検出する機能を有し、回転角度検知部と自車方向補正部とを備えた車載用電子機器において、さらに振動検出部を備え、アクセサリ電源がオフになった後、前記回転角度検知部への電源供給がオフとされてスタンバイ状態となり、前記振動検出部が振動を検出せず前記アクセサリ電源がオフの間はスタンバイ状態が継続され、スタンバイ状態において前記振動検出部が振動を検出すると、前記回転角度検知部へ電源が供給されて前記回転角度検知部が起動し、前記回転角度検知部が回転角度を検知し、前記アクセサリ電源がオンになると、前記自車方向補正部は、前記検知された回転角度に基づき前記アクセサリ電源がオフになった際の自車方向を補正する構成とした。
(もっと読む)
測位システム、測位方法及び測位プログラム
【課題】 GPSによる位置測位が成功しない場合等であっても、高精度の測位結果を得る
【解決手段】 測位サーバ10は、位置と当該位置おけるGPS衛星40からの信号の受信が可能か否かとの関係を示す情報をGPS衛星40毎に保持したGVMデータベース12と、セルラ端末20において信号が受信されたGPS衛星40を示す受信GPS情報を取得するGPS情報取得部13と、GVMデータベース12に保持された情報に基づき、受信GPS情報からセルラ端末20の位置の候補を推定する候補推定部14と、セルラ端末20におけるセルラ基地局30からの電波の受信状態を示す受信状態情報を取得する受信状態情報取得部15と、候補推定部14によって推定されたセルラ端末20の位置の候補、及び受信状態情報からセルラ端末20の位置を推定する基地局測位演算部17と、を備える。
(もっと読む)
車載用ナビゲーション装置
【課題】環境照度が高い場合に、ナビゲーションに必要な画像の視認性を特に高めることにより、車両の運転を円滑化することができる車載用ナビゲーション装置を提供する。
【解決手段】照度センサと表示部とを有する車載用ナビゲーション装置において、前記照度センサが検出した検出信号のレベルが所定の閾値を超えた場合に、ナビゲーションに必要な画像を強調表示したナビゲーション画面を、通常のナビゲーション画面に代えて前記表示部に表示させるよう制御する制御部を備えた構成とした。
(もっと読む)
角速度算出装置、ナビゲーション装置、角速度算出方法
【課題】ロール方向の角速度を計測しない状況で、ロール方向の傾斜によるヨー方向の角速度計測値の誤差を補正することが可能な角速度算出装置を提供する。
【解決手段】車両2のヨー方向の角速度を計測した後に、車両2の旋回走行により発生する遠心力f1を算出し、その遠心力によるロール方向のモーメントを外力とする運動方程式からロール角θを算出する。そして角速度の計測値をcosθで除算することで角速度を補正する。
(もっと読む)
ナビゲーション装置
【課題】画面の多くのエリアにユーザにとって有用な情報を表示できるナビゲーション装置を提供する。
【解決手段】前方を撮影するカメラ7と、カメラで撮影された前方の映像を取得する映像取得部8と、映像取得部で取得された映像の一部を切り取って拡大または縮小する拡大縮小処理部16と、拡大縮小処理部で拡大または縮小された映像に、該映像上に存在する案内対象物を説明するための図形、文字列またはイメージを含むコンテンツを重畳させて合成する映像合成処理部14と、映像合成処理部で合成された映像を表示する表示部10を備えている。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】現在位置を測定して位置データを記録していく測位装置において、一連の位置データにより詳細な移動軌跡を表すことができ、且つ、位置データの全体の記録量がさほど大きくならないようにする。
【解決手段】現在位置の測定を行う測位手段と、この測位手段の測定によって順次取得される一連の位置データの記録制御を行う記録制御手段とを備えた測位装置、並びに、その位置データの記録方法およびプログラムにおいて、一連の位置データにより示される移動軌跡の曲り箇所(D2,D3,D4,D5)の判別を行って、曲り箇所と判別されない部分の位置データを省いて、曲り箇所と判別された部分の位置データのみを記録させる。
(もっと読む)
ナビゲーション装置、補正値初期化方法及びナビゲーション機能付携帯電話機
【課題】地磁気センサによる方位の検出精度を高め得るようにする。
【解決手段】PND1の制御部11は、サスペンド状態から電源オン状態に切り替えられた際、地磁気センサ8から得られた地磁気データTMDを補正するための補正値を含む学習値LN及びその変動幅を制限する学習レベルLLについて、方位算出部28により初期化処理を行う。これにより方位算出部28は、サスペンド状態への移行直前と比較して周囲の磁場が大きく異なる場合や、サスペンド中にPND1内の金属部品等における磁化が変化した場合にも、学習値LNおよび学習レベルLLを確実に最初の値に戻し、学習し直すことができる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーション機能付携帯電話機
【課題】本発明は、GPS信号を受信できない環境下においても移動体の現在位置を高精度に通知できるようにする。
【解決手段】本発明は、GPS信号に基づいて現在位置を測位し、現在位置を示す自車マークPMを周辺地図に重ねて表示し、現リンクに対する次リンクの属性情報を読み出し、当該次リンクに対して衛星信号の受信感度が悪いと想定されるエリアであると判断した場合、現リンクから次リンクへ移った後はGPS信号に基づく現在位置を用いるのではなく、自律的に推測した現在位置に従って自車マークPMを止めることなく周辺地図に表示し続けるようにする。
(もっと読む)
ナビゲーション装置、動作制御方法及び携帯端末装置
【課題】電力消費を低減する。
【解決手段】PND1は、当該PND1に作用する地磁気値Mを検出する地磁気センサ8を設けると共に、当該PND1がクレードル3に装着されているか否かをクレードル検出部17により判定する。PND1がクレードル3に装着されている場合、動作制御部29は、地磁気センサ8、方位算出部28及び姿勢角検出部27を動作させる。一方PND1がクレードル3に装着されていない場合、動作制御部29は、地磁気センサ8、方位算出部28及び姿勢角検出部27の動作を停止させる。これによりPND1は、車両9から取り外された場合は地磁気センサ8を動作させると共に、正しい方位を表す地磁気値Mを検出することが困難である車両9に取り付けられた場合は地磁気センサ8の動作を停止させることができる。
(もっと読む)
測位組み合わせ決定システム
【課題】目標とする測位精度を達成可能な走行環境に合わせた好適な測位組み合わせを、対象とする走行環境内での実機実験なしに選択可能とする、即ち、低コストで目標とする測位精度を達成可能な測位組み合わせを決定する。
【解決手段】ビークルで用いる複数測位手段の組み合わせを決定するシステム(1)であって、走行環境中の場所毎に決定される測位精度影響パラメータを記憶する手段(7)と、測位精度影響パラメータと複数測位手段の測位精度との関係を記憶する手段(9)と、測位精度影響パラメータと複数測位手段との対応情報を記憶する手段(6)と、走行環境における測位精度影響パラメータを取得する手段(8)と、その測位精度影響パラメータの対応情報を取得し、その対応情報に基づいて前記関係を参照して走行環境中の各位置における複数測位手段の測位精度を予測する手段(10)と、を備え、複数測位手段の組み合わせに対する測位精度を予測する。
(もっと読む)
201 - 220 / 898
[ Back to top ]