
Fターム[2F129BB47]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | ハイブリッド (898)
Fターム[2F129BB47]に分類される特許
61 - 80 / 898
自位置特定システム、自位置特定プログラム及び自位置特定方法
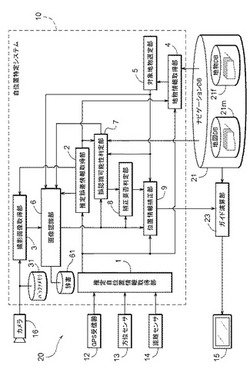
【課題】データベースに整備されていない地物に基づいて自位置が特定されることを抑制し、データベースに整備されている地物に基づいて適切に自位置を特定する。
【解決手段】推定自位置情報を取得する推定自位置情報取得部1と、撮影画像取得部3と、地物データベース21fから、画像認識の対象となる対象地物の対象地物情報を取得する地物情報取得部4と、対象地物の画像認識を行なう画像認識部6と、画像認識結果と対象地物情報とに基づいて推定自位置情報を補正する位置情報補正部9と誤認識可能性の有無を判定する誤認識可能性判定部7と、位置情報補正部9による補正の要否を判定する補正要否判定部8とを備え、補正要否判定部8は、誤認識可能性が有ると判定された場合に、位置情報補正部9による補正が不要と判定する。
(もっと読む)
ナビゲーション装置

【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、エスカレータや動く歩道やエレベータを通過することで発生する推定位置と実際の位置との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置がエスカレータ又は動く歩道又はエレベータに到達し(S41:Yes)、歩数計のカウントが一定時間停止したとき(S42:Yes)、推定位置をエスカレータ又は動く歩道又はエレベータの終点に設定する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】GPSユニット3とINSユニット5とを備えた位置算出装置1において、影響度合設定部7は、位置算出を開始してから所与の条件が成立するまでの間は、GPS計測結果のINS計測結果に対する影響度合を第1の度合に設定し、所与の条件が成立した後は、影響度合を第1の度合よりも低い第2の度合に設定する。そして、カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
航法計算システム
【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
異常値判定装置、測位装置、及びプログラム
【課題】GPS情報とINS情報とを統合して測位を行う場合に、GPS情報の異常値を精度良く判定する。
【解決手段】区間幅決定部22で、速度情報の累積誤差と擬似距離誤差との差が所定範囲の値となるように、INS情報とGPS情報とを統合する区間幅を決定する。区間幅内の各時刻で観測された速度情報及び擬似距離を、N点観測値記憶部24に記憶する。初期値設定部26で、N点観測値記憶部24に記憶されたINS情報に基づいて方位角及び移動ベクトルの初期値を設定し、最適解推定部28で、観測値(ρ,Δx)から推定初期値からの変位で表される状態(dx,Cb,dθ)を推定する方程式を立て、最小二乗法により推定初期値を更新しながら収束するまで繰り返して状態を推定し、収束したときの状態及び推定初期値から測位解を推定する。異常値判定部30は、測位解と擬似距離から得られる位置との残差γが閾値を超える擬似距離を異常値と判定する。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車両が逆走状態にあると誤検出されることを防止した運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】GPS21や車速センサ22等の各種センサを用いて車両の現在位置と方位を検出し、車両の走行する道路に規定された走行方向である規定走行方向を取得し、車速パルスを所定間隔で取得している状態においては、検出された車両の現在の方位と規定走行方向とに基づいて、車両が逆走状態にあるか否かを検出するとともに、車速パルスを取得できない状態においては、検出された車両の現在の方位に基づいて、車両が逆走状態にあるか否かを検出しないように構成する。
(もっと読む)
測位装置、測位システム、測位方法、プログラム
【課題】周囲環境の影響によるセンサの信頼度低下に対して高い精度で測位が行えるようにする。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
(もっと読む)
位置測定システム、位置測定装置および位置測定プログラム
【課題】受信可能なTDOA測定が4つよりも少ない状態において、十分に良好な位置推定ができる位置測定システム、位置測定装置および位置測定プログラムを提供する。
【解決手段】3つ以上のランドマーク装置と、前記ランドマーク装置から送信される情報であって該ランドマーク装置の位置を示す位置情報を有する信号を受信する移動端末とを有する位置測定システムであって、前記移動端末は、該移動端末に内蔵されたセンサであって、該移動端末の移動運動を検出するセンサと、前記3つ以上のランドマーク装置のそれぞれから受信した前記位置情報と、前記センサの検出値とに基づいて、該移動端末の位置を算出する位置推定手段とを有する。
(もっと読む)
相対位置推定装置及びプログラム
【課題】少ないデータ通信量で、他の装置との相対位置を精度良く推定することができるようにする。
【解決手段】位置・速度ベクトル算出部24によって自車両の位置及び速度ベクトルを算出する。無線通信部18によって、相手車両の位置及び速度ベクトルを受信する。位置差分相対位置算出部26によって、受信された相手車両の位置から、各時刻について相手車両の相対位置を算出する。軌跡算出部32によって、自車両の速度ベクトルを積算して軌跡を算出する。相手軌跡算出部34によって、受信された速度ベクトルを積算して相手車両の軌跡を算出する。軌跡利用相対位置推定部36によって、自車両の軌跡と、相手車両の軌跡と、各時刻について算出された相対位置とに基づいて、相手車両の軌跡の最適値を推定し、軌跡上の特定点における相対位置を推定する。
(もっと読む)
経路登録装置及び経路登録方法
【課題】日常的に走行する走行経路以外の他の走行経路の登録を抑制することができる経路登録装置及び経路登録方法を提供する。
【解決手段】制御部は、今回の車両走行開始時における出発地及び予め設定された規定値Nth以上の走行回数Nを含む管理データがデータ記憶領域に記憶済みである場合(ステップS28,S31:YES)、自車両の走行ルートの取得を開始し(ステップS32)、当該管理データに含まれる到着地に自車両が到着した場合(ステップS33:YES)、走行ルートの取得を終了する。そして、制御部は、取得した走行ルートをルート記憶領域に記憶(登録)させる(ステップS41)。
(もっと読む)
移動端末及び移動経路算出プログラム
【課題】移動経路の算出精度を維持しつつ、消費電力を低減する。
【解決手段】絶対位置検出部30が移動端末100のアンカーポイントを検出し、リンク情報生成部22が、移動端末が曲がるまでの間に移動した線分(リンク)を取得し、移動経路算出部24が、リンク情報生成部22が取得したリンク上を移動端末が移動している間に絶対位置検出部30で検出されたアンカーポイントに基づいて、リンクの角度(所定方向)を算出するとともに、当該リンクの角度と直進距離とから移動端末の移動経路を算出する。そして、移動端末が1つのリンク上を移動している間に、絶対位置検出部においてアンカーポイントが複数検出された場合に、移動経路算出部は、遅いタイミングで検出されたアンカーポイントほどリンクの角度の算出において複数のアンカーポイントそれぞれの重み係数kjを大きくする。
(もっと読む)
移動端末及び移動経路算出プログラム
【課題】移動経路の算出精度を維持しつつ、消費電力を低減する。
【解決手段】絶対位置検出部30が移動端末100の絶対位置を検出した結果と、リンク情報生成部22が移動端末の直進距離を示す線分(リンク)を生成した結果と、に基づいて、移動経路算出部24が移動経路を算出する。この場合に、移動経路算出部は、移動経路を算出する際に、リンク情報生成部22が取得したリンクの長さを補正するための補正パラメータr1、r2、r3、…、と、リンクの方向(角度t1、t2、t3、…)とを絶対位置検出部30が検出した絶対位置と、絶対位置を検出したときに移動端末が移動していたリンク上の点との距離に基づいて算出する。
(もっと読む)
情報提供装置
【課題】ドライバに対しより確実に情報を伝えることができる車載用の情報提供装置を提供する。
【解決手段】ナビゲーション装置の制御部は、年齢,運転歴や、運転操作に基づき、ドライバの運転技量を判定すると共に、運転技量と、自車両の運転操作や自車両周辺の静的環境,動的環境に基づき、該ドライバにとっての運転負荷を推定する。そして、運転負荷が低い場合には、生成した各種メッセージを通知する(S1225)と共に、運転負荷が高い場合には、メッセージの提供を保留し(S1230)、運転負荷が低くなったときに、保留しているメッセージを提供する(S1245)。
(もっと読む)
運転支援装置
【課題】GPSモジュールから得られる情報に基づく自車両の位置等の検出精度を判定し、かつ当該判定の精度を高める。
【解決手段】GPSモジュール3により検出される自車両1の走行速度と車速検出部13により車速パルスに基づいて検出される自車両1の走行速度との速度差に基づいて、GPSモジュール3により検出される自車両1の位置、進行方位および走行速度の有効性を判定する。さらに、自車両1の加速度に基づいて上記速度差を補正することにより、車速検出部13の応答性とGPSモジュール3の応答性との相違によって上記速度差が過大となることを抑制し、GPSモジュール3により検出される自車両1の位置等の有効性の判定精度を高める。
(もっと読む)
端末装置及び地磁気環境判定プログラム
【課題】端末装置及び地磁気環境判定プログラムにおいて、観測地点の周囲の外乱磁気による影響を抑制して自律測位の信頼性の低下を防止可能とすることを目的とする。
【解決手段】互いに直交する3軸方向の地磁気を検出する地磁気検出部と、3軸方向の加速度を検出する加速度検出部と、検出した地磁気及び加速度に基づいて地磁気を表す地磁気ベクトルを鉛直方向に投射した鉛直成分を算出する鉛直成分算出部と、算出した鉛直成分の一定時間内における分散を算出する分散算出部と、前記分散と閾値との比較に基づいて前記地磁気の信頼性を示す地磁気尤度を判定して出力する地磁気尤度判定部を備えるように構成する。
(もっと読む)
現在位置表示装置
【課題】船舶や航空機などの移動する施設内にユーザが滞在している場合に、施設の位置および進行方向を認識でき、また、ユーザが施設内のいずれの位置にいるのかを把握することができる現在位置表示装置を提供する。
【解決手段】本発明の移動端末11は、移動施設の内部を表現する案内図データを記憶する記憶部と、移動端末の現在位置情報である端末位置情報を取得する端末位置取得部と、移動施設の現在位置情報および方向情報を含む施設位置情報を取得する施設位置取得部と、案内図データおよび施設位置情報に基づいて回転処理が施された移動施設の案内図を作成する案内図作成部と、作成された前記案内図上に端末位置情報に基づき移動端末の現在位置を表示する表示部とを備えることを特徴とする。
(もっと読む)
鉄道車両の位置検出装置および位置検出方法
【課題】駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置を提供する。
【解決手段】GPS計測機33により求められた保全車両Hの概略位置を入力すると共に移動距離を算出する距離算出部21と、データ取得部22で取得された保全車両Hの角速度ω及び角加速度ω´を入力して進行方向をファジィ推論により推定する進行方向推定部23と、距離算出部21で算出された移動距離及びGPS計測機33により求められた概略位置を入力し且つ進行方向推定部23から進行方向を入力して分岐点を推定する分岐点推定部25と、データ取得部22で求められた変位角θ及び進行方向推定部23で推定された進行方向を入力して分岐角を検出すると共に当該分岐角に対応する分岐線番を出力する分岐角検出部26とを具備したもの。
(もっと読む)
ナビゲーション装置
【課題】合流対象である移動体の位置を取得し、かつ、表示可能なナビゲーション装置を提供する。
【解決手段】移動体との合流場所への経路を表示手段29に表示して誘導を行うナビゲーション装置20において、前記移動体の位置を取得する取得手段32と、前記移動体との間の距離が所定距離より離れている間は、自己の位置と、前記移動体が位置する方向を表示し、前記移動体との間の距離が所定距離以下の間は、自己の位置と、前記移動体の位置とを所定時間毎に更新して表示するように前記表示手段の表示を切り替える表示切替手段24と、を備える構成とする。
(もっと読む)
電力分配支援装置、方法およびプログラム
【課題】電力需要がある地点に効率的に電力を分配する技術を提供すること。
【解決手段】車両が出発地点から目的地点まで走行する場合の消費電力量を取得し、前記車両に搭載されたバッテリの前記出発地点における残電力量を取得し、前記目的地点において前記車両によって運搬された電力の電力需要があるか否かを判定し、前記消費電力量が前記残電力量よりも少なく、かつ、前記目的地点において前記車両によって運搬された電力の前記電力需要があると判定された場合には、前記目的地点に到達するまでの間に前記バッテリへの充電を行うように促す案内を行う。
(もっと読む)
案内装置、案内方法、および、案内プログラム
【課題】目印対象物の認識精度を向上可能な案内装置、案内方法、および、案内プログラムを提供する。
【解決手段】目印対象物の画像認識に係る認識テンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する。また、案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断し、認識自信度が向上したと判断された場合(S120:YES)、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する(S121)。これにより、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
(もっと読む)
61 - 80 / 898
[ Back to top ]