
Fターム[2F129BB47]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | ハイブリッド (898)
Fターム[2F129BB47]に分類される特許
881 - 898 / 898
カーナビゲーション装置
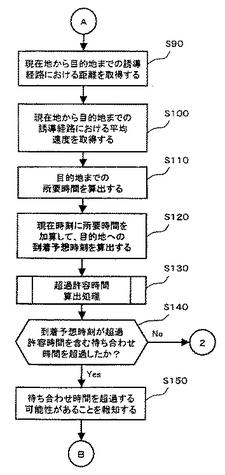
【課題】目的地への到着時間が、希望する時間よりも遅くなる場合、その旨をユーザに報知するカーナビゲーション装置を提供する。
【解決手段】現在地から目的地までの所要時間を算出し(ステップS110)、現在時刻にこの所要時間を加算して到着予想時刻を算出する(ステップS120)。そして、ユーザの設定した目的地での待ち合わせ時間と到着予想時刻とを比較し(ステップS140)、到着予想時刻が待ち合わせ時間を超過する場合には、到着予想時刻が待ち合わせ時間を超過する可能性があることを報知する(ステップS150)。これにより、ユーザは、例えば、目的地で待ち合わせの約束をしている相手に対し、到着が遅れる可能性があることを事前に連絡することが可能となる。
(もっと読む)
ナビゲーション装置

【課題】 オフロード判定及びオンロード判定を精度よくかつ時間遅れなく迅速に行えるようにする。
【解決手段】 地図データを記憶する記憶手段7と、記憶手段に記憶された地図データから車両の現在地近傍の情報を取得する現在地情報取得手段12と、車両の現在地近傍の情報から道路の路側帯部に関する情報を取得して路側帯部の跨ぎを判定する路側帯部判定手段14と、路側帯部判定手段14により道路の路側帯部跨ぎを判定したことを条件に車両の現在地がオンロード状態のときにはオフロードの判定を行い、車両の現在地がオフロード状態のときにはオンロードの判定を行うオン/オフロード判定手段11とを備え、車両のオフロード判定/オンロード判定を行う。
(もっと読む)
測位装置およびそれを用いる位置情報システム
【課題】 携帯電話の端末装置や携帯情報端末に組込まれるなどして、使用者によって所持され、GPS測位を行うとともに自律測位も併用するようにしたセキュリティ端末において、常に良好な測位結果を得られるようにする。
【解決手段】 GPS受信手段11およびGPS測位手段12によるGPS測位結果と、自律測位測位手段13による自律測位結果とを、制御手段15が選択的に採用して、無線通信手段14から通信ネットワーク2を介してセンター装置3へ送信するセキュリティ端末1において、前記制御手段15は、GPS測位を行う度に、GPS測位結果と自律測位結果とから、それぞれに予め設定されるエラー値判断基準に基づき、より正確と推定される方の測位結果を、前記自律測位手段13の初期位置に設定する。したがって、逐次更新され、しかもGPS測位結果をそのまま採用する訳ではなく、初期位置精度を向上できる。
(もっと読む)
車両用ナビゲーション装置及び道路地図配信システム
【課題】車両が地図データにない道路を走行した場合に、その走行軌跡を高精度に求め、また、その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成すること。
【解決手段】位置検出器1からの信号に基づいて算出される自車位置の位置情報、及びマップマッチング処理によって自車位置を道路上の位置に修正したマップマッチング位置の位置情報がメモリに記憶される。これら自車位置及びマップマッチング位置に関する位置情報を用いて、自車両が地図データに記憶されている記憶道路を逸脱した地点、及び記憶道路に復帰した地点を決定する。この結果、車両が記憶道路を逸脱してから記憶道路に復帰するまでの走行軌跡を高精度に求めることができる。その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成できる。
(もっと読む)
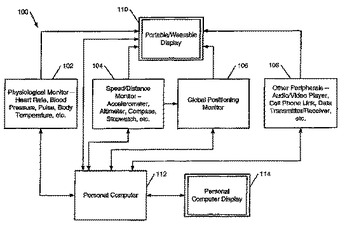
運動履行のマルチセンサ監視方法
運動履行監視システムおよび方法は、その多くが、何らかの方法で、全地球測位衛星(「GPS」)データを利用し、運動選手および/または運動競技中に運動選手によって使用される装備にデータおよび情報を提供する。このようなシステムおよび方法は、たとえば、競技前の計画、目標設定、および較正の目的のために運動選手および/または運動選手のトレーナーに経路情報を提供することができる。このようなシステムおよび方法は任意に、たとえば事前に設定された目標に到達するのを助けるために、競技が行われている間に運動選手にリアルタイム情報を提供することができる。さらに、このようなシステムおよび方法によって収集されたデータおよび情報は、たとえば、過去の履行を評価し、今後の履行を改善するのを助けるために、競技後の分析において運動選手および運動選手のトレーナーの助けとなることができる。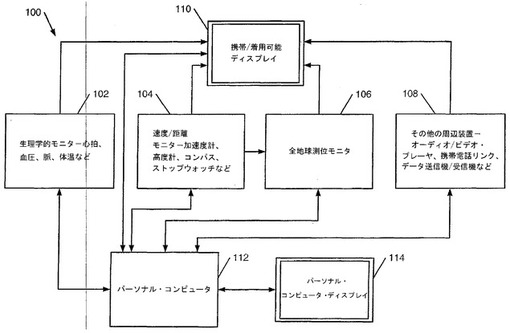
 (もっと読む)
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
ナビゲーション装置
【課題】 測位誤差の補正精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2による今回の測位タイミングにおける測位位置が含まれる予測誤差範囲を設定する誤差範囲設定部12と、今回の測位タイミングにおいてGPS受信機2から出力された実際の測位位置が予測誤差範囲に含まれるときに実際の測位位置を用い、実際の測位位置が予測誤差範囲に含まれないときに、実際の測位位置と予測誤差範囲との相対的な位置関係に基づいて測位位置の補正を行う相対位置判定部14および位置補正部16とを備えている。
(もっと読む)
携帯装置で使用するためのパーソナルナビゲーション装置
ユーザによって使用されるナビゲーションシステムは、ナビゲーションユニットと携帯装置とを含む。ナビゲーションユニットは、ナビゲーション関連出力を生成する。ナビゲーションユニットは、無線通信リンクを介して携帯装置にナビゲーション関連出力を送信する。携帯装置は、ナビゲーション関連出力を受信し、それによって実施される処理のためにナビゲーション関連出力の少なくとも一部を使用する。一実施形態では、携帯装置は、携帯装置のユーザからユーザ入力を受信するための入力インターフェースを含む。このような一実施形態では、携帯装置は、無線通信リンクを介してナビゲーションユニットにナビゲーション関連入力を送信し、ナビゲーションユニットは、ナビゲーション関連出力を生成するため、ナビゲーション関連入力の少なくとも一部を使用する。 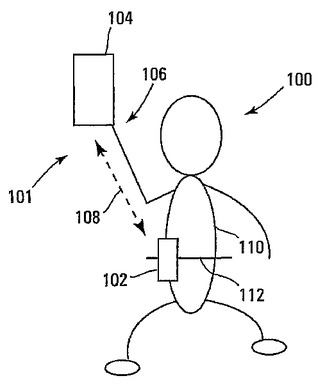 (もっと読む)
(もっと読む)
移動体案内装置
【課題】カーナビゲーション装置などの移動体案内装置の位置検出誤差に起因した誤認識を補正できるようにして正確な経路案内を行なえるようにする。
【解決手段】車載端末装置により有料道路の出入口に設けられる自動料金収受用の通信装置と通信を行なうと、ナビゲーション装置において、車載端末装置により料金収受処理を行なった有料道路の出入口の情報を利用することができる。これにより、現在位置を特定する際にどちらの有料道路かといった判定や有料道路か一般道路かの判定が困難となる場合でも、料金収受の履歴情報に基づいて確実且つ正確に現在位置の特定をすることができるようになる。
(もっと読む)
出発案内装置及び出発案内プログラム
【課題】余暇の範囲内での快適なドライブを実現する。
【解決手段】余暇としての行動予定時間を入力することにより(S100)、その行動予定時間で移動可能な範囲を算出し(S120,S130)、その移動範囲に存在するレジャースポットを検索する(S140)。そして、レジャースポットが選択されると(S150,S160)、選択されたレジャースポットに基づいたルートを探索し、ドライブプランを表示して(S170)、ドライブルートを設定する。
(もっと読む)
走行路の測定方法
本発明は、絶対座標系に対する軌道の実際の位置を含む軌道測定計画による軌道測定方法に関するものである。測定プラットホーム2は、慣性プラットホーム6を搭載し、軌道に沿って案内される。慣性プラットホーム6は、測定開始時に初期設定または較正され、かつ座標系に対して整合される。慣性プラットホーム6は、また測定プラットホーム2の走行中に座標系に対するその時々の測定プラットホーム位置を検出する。慣性プラットホーム6の位置データは、軌道近くに配置された固定点9,9´に基づいて周期的に点検され、座標系に対する偏差は、新たな較正または整合により修正される。 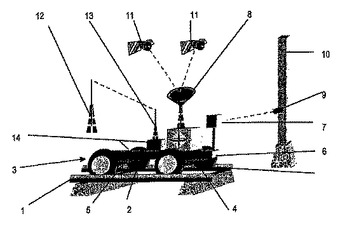 (もっと読む)
(もっと読む)
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
ナビゲーション装置
車両内に居る人に位置を分かりやすく提供可能なナビゲーション装置を提供することを課題とする。車両に搭載され、ターンバイターン方式により、又は音声のみを使って車両を案内するナビゲーション装置は、制御部(21)と、近距離無線通信部(14)とを備える。制御部(21)は、車両の位置を導出した後、導出された位置周辺の地図画像データを取得する。近距離無線通信部(14)は、車内空間をカバー可能な通信エリア内に電波を送出可能であって、制御部(21)により導出した位置と地図画像データとを、自身の通信エリア内に位置する移動体通信端末装置(30)に送出する。移動体通信端末装置(30)は、近距離無線通信部(14)により送出された位置及び地図画像データを受信し表示する。 (もっと読む)
ナビゲーション装置および方法、並びにナビゲーションプログラム
ユーザが表示画面等に視線を移すことなく安全に経路を事前に確認することができるナビゲーション装置および方法、並びにナビゲーションプログラムを提供する。 ナビゲーション装置は、出発地から目的地までの経路を探索する経路探索部(22)、探索された経路に基づいて音声により誘導する音声処理制御部(23)、および誘導前に報知する経路の概略を作成する経路概略作成部(25)を備える。音声処理制御部(23)は、音声処理部(19)およびスピーカ(6)を介して、誘導前に音声で経路概略を報知する。ユーザは、運転中等で視線を移せない状況においても安全に経路を事前認識することができる。 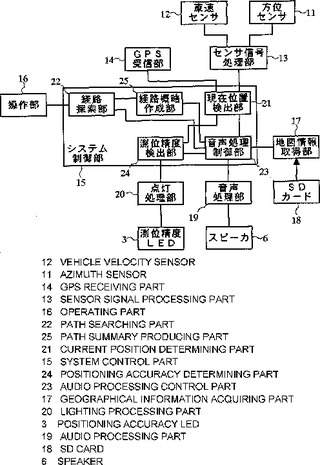 (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
ディープインテグレーション用GPS/IMUクロック同期
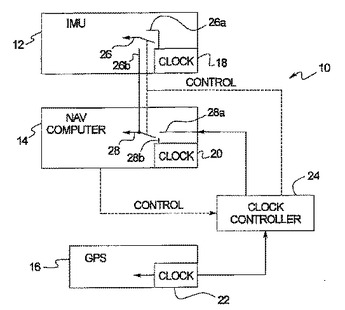
航法システムは慣性計測ユニット、航法コンピュータ、GPS受信機、クロックコントローラを備える。慣性計測ユニットは第1のクロックと第1のスイッチを備え、航法コンピュータは第2のクロックと第2のスイッチを備え、GPS受信機は第3のクロックを備える。第1と第2のスイッチはクロックコントローラで制御される。このため、慣性計測ユニット、航法コンピュータ、GPS受信機においてそれぞれ自身のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータにおいて第2のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータとGPS受信機において第3のクロックを使用することができる。
 (もっと読む)
(もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 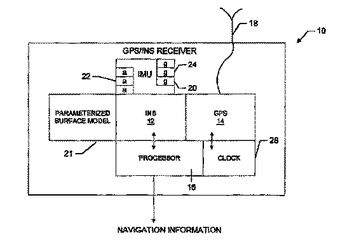 (もっと読む)
(もっと読む)
移動通信端末機の位置情報を用いたナビゲーションサービス提供方法
本発明による移動通信端末機の位置情報を用いたナビゲーションサービス提供方法は、(1)ユーザの第1端末機の位置情報を検出する段階と、(2)検出された前記第1端末機の位置情報を出発地情報として受け取る段階と、(3)所定の目的地情報を受け取る段階と、(4)前記出発地情報と前記目的地情報に基づいて所定の経路情報を出力する段階と、(5)前記出力された経路情報を前記ユーザの前記第1端末機に提供する段階と、(6)前記ユーザの第2端末機でのGPS信号の受信可否を判断する段階と、(7)GPS信号を受信することができる場合、前記GPS信号を介して出力される前記ユーザの位置情報に基づいて前記経路情報を補正する段階と、(8)前記補正された経路情報を前記第1端末機に提供する段階とを含む。 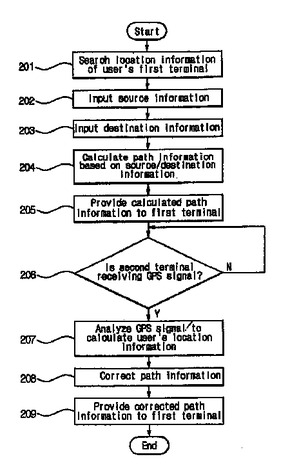 (もっと読む)
(もっと読む)
881 - 898 / 898
[ Back to top ]