
Fターム[2F129BB47]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | ハイブリッド (898)
Fターム[2F129BB47]に分類される特許
101 - 120 / 898
移動端末、システム及び方法
【課題】自律航法機能を有する移動端末における測位誤差の蓄積を解消するため、ルート上の各地点で適宜位置補正する。
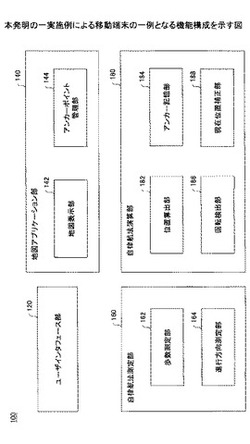
【解決手段】地図情報における移動端末のユーザの出発地から目的地までのルート上で前記ユーザが方位変更すると想定される方位変更地点を取得し、該取得した方位変更地点をアンカーポイントとして設定及び格納するアンカー管理部と、当該移動端末の動きを検知し、前記動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき、当該移動端末の現在位置を算出する位置算出部と、前記センサ情報に基づき、前記ユーザの回転動作を検出し、該検出した回転動作の回転地点を決定する回転検出部と、前記アンカー管理部により格納されているアンカーポイントから前記決定された回転地点に対応するアンカーポイントを決定し、該決定されたアンカーポイントの位置により当該移動端末の現在位置を補正する現在位置補正部とを有する。
(もっと読む)
移動スキル情報提供装置

【課題】移動中のトラブル発生を低減しながら、他の車両の移動スキルに関する情報を得られるようにした移動スキル情報提供装置を提供する。
【解決手段】センタ装置20の制御装置21は、登録された車両S,A,B,Cのランク付けを行うことで、最上級ランクの車両S,上級ランクの車両A、中級ランクの車両B、初級ランクの車両Cであることをランク付けする。センタ装置20の制御装置21は、最上級ランクの車両Sの車載端末1Sから得られた移動スキルに関する情報を上級ランクの車両Aの車載端末1Aに提供する。車両Aの車載端末1A側で移動スキルが確立されると、制御装置21は、上級ランクの車両Aの車載端末1Aの移動スキルに関する情報を当該車載端末1Aから受信し、中級ランクの車両Bの車載端末1Bに提供する。
(もっと読む)
移動端末、システム及び方法
【課題】自律航法機能を有する移動端末における進行方向の推定誤差の蓄積を解消するため、地図情報を利用することにより進行方向を補正する。
【解決手段】目的地までのルート上に移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、歩数及び進行方向を示すセンサ情報の測定部と、当該移動端末の現在位置を決定する位置算出部と、ユーザの進行方向の変化量が所定の期間に所定の範囲内にあるか判断することによって直進歩行状態にあると推定した場合、前記ルート上の前記直進歩行状態にある直進部分の方位により前記ユーザの進行方向を補正する進行方向補正部と、前記補正された進行方向と、前記直進歩行状態の開始時点及び開始地点とに基づき、当該移動端末の現在位置を前記開始地点から再計算し、該再計算された現在位置により当該移動端末の現在位置を補正する現在位置補正部とを有する。
(もっと読む)
車載機器、車載機器の制御方法、及び、プログラム
【課題】所望の交差点を容易に特定できるようにした上で、特定した交差点の周辺に存在する施設を検索するようにする。
【解決手段】車載ナビゲーション装1は、第1道路を示す情報、この第1道路と交差する第2道路を示す情報、及び、施設種別が入力される入力部14と、入力された第1道路を示す情報、及び、第2道路を示す情報に基づいて、第1道路と第2道路とが交差する交差点を検索する交差点検索部20と、入力された施設種別を有する施設であって、交差点検索部20により検索された交差点の周辺に存在する施設を検索する施設検索部21と、を備える。
(もっと読む)
車両用ナビゲーション装置
【課題】複数台の車両でグループ走行し、共通の目的地に向かう際、各車両の位置関係を容易に把握することのできる車両用ナビゲーション装置を提供する。
【解決手段】地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、を備える。
(もっと読む)
走行支援装置、走行支援方法、走行支援プログラム
【課題】利用者の不安を低減させて燃料の補充の必要性を報知することができる走行支援装置、走行支援方法、走行支援プログラムを提供する
【解決手段】内燃機関13とモータ14のうち少なくとも一方を動力源に利用して走行可能な車両11に搭載される走行支援装置21であって、給油施設を記憶する地図情報記憶部29と、車両11の現在地を示す現在地情報を取得すると共に、燃料タンク15内の燃料の残量を示す残量情報を取得し、燃料の残量が報知閾値となった場合に給油の必要性を報知する制御部25とを備え、制御部25は、点灯許可エリアと点灯禁止エリアを設定すると共に、点灯許可エリアにおいて燃料の残量が報知閾値となるように内燃機関が利用されずにモータ14が利用される区間と内燃機関13が少なくとも利用される区間とを設定することにより利用計画を作成し、車両11の現在地情報と利用計画とに基づいてモータ14と内燃機関13とを制御する。
(もっと読む)
車椅子利用者用ナビゲーション装置
【課題】GPSの受信不可能な駅構内でも、自車位置検知手段として、車いすに装着されたセンサでのみ行う自立航法で行い、これにより検知された自車位置に基づきバリアフリー経路を誘導案内することを可能とする。
【解決手段】駅の出入り口とホーム間、異なるホーム間バリアフリー経路を1つのリンクとして扱い、そのリンク上に設けられた誘導案内ポイント付近に接近した場合、当該誘導ポイント周辺光景の実画像情報を表示し、利用者が当該誘導ポイントに到着し、確認操作を行った時点で自車位置を誘導ポイントに設定補正する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 測位装置が異なる保持状態にされた場合でも、適宜に方式を切り替えて測位を行うことのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 歩行体に保持されて測位を行う測位装置において、動きと方位に関する検出を行う自律航法用センサと、測位用衛星から信号を受信して測位を行う衛星測位手段と、自律航法用センサの出力に基づき相対的な位置変化を求めて測位を行う自律測位手段(S4〜S6,S8〜S10)と、当該測位装置の保持状態を判別する保持状態判別手段(S3)と、前記衛星測位手段および前記自律測位手段を制御して前記歩行体の移動経路に沿った一連の位置データを作成するとともに、前記保持状態判別手段の判別結果に基づいて前記自律測位手段による測位の方式を切り替える測位制御手段とを備えている。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】車両が走行している道路を正確に特定できない場合に、自動制御を実行することができなかった。
【解決手段】車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定し、前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する。
(もっと読む)
方位角推定装置及びプログラム
【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
ナビゲーション装置
【課題】ユーザが所望の施設の検索を容易に行えるようにするナビゲーション装置を提供する。
【解決手段】ナビゲーション装置100は、ジャンル項目を複数の階層に分類して管理し、施設をジャンル項目に対応付けて記憶する施設情報記憶手段12Aと、各階層でジャンル項目を表示する表示手段10と、各階層でジャンル項目の選択を受け付ける選択受付手段11と、を備え、受け付けたジャンル項目の下位の階層に、所望の施設が対応付けられているジャンル項目がなかった場合に、受け付けたジャンル項目の下位の階層のジャンル項目に、所望の施設が対応付けられているジャンル項目を表示する構成とする。
(もっと読む)
測位装置、測位装置の調整方法およびプログラム
【課題】 較正処理の実行時期を判断するためだけに多大な負荷を要することなく、自律航法の測位に必要な較正処理を適切な時期に行うことのできる測位装置、測位装置の調整方法およびプログラムを提供する。
【解決手段】 測位衛星から信号を受信して測位を行う第1測位手段(S1,S2,S8,S9)と、相対的な移動方向および移動量の計測によって測位を行う第2測位手段(S5,S6)と、第2測位手段の連続的な測位により任意の移動過程の位置データが取得され、その後に第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記移動過程の各地点の位置データを補正する補正手段(S11)と、第2測位手段の較正処理を行う較正手段(S14〜S19)と、補正手段の補正量に基づいて較正処理の実行時期を制御する較正時期制御手段(S13)とを備えている。
(もっと読む)
ナビゲーション端末、ナビゲーション方法およびナビゲーションプログラム
【課題】案内経路上でGPS測位が困難な場所を通過する際のナビゲーション精度を向上
させることが可能なナビゲーション端末を提供する。
【解決手段】ナビゲーション端末は、サーバから経路案内データを取得する手段と、ナビ
ゲーション端末の現在位置を測位する手段と、ナビゲーション端末を携帯するユーザの歩
数を計測する手段と、測位位置と経路案内データとに基づいて経路案内及び現在位置を出
力するGPSナビモードと、計測した歩数と経路案内データとに基づいて経路案内及び現
在位置を出力する歩数計ナビモードとを有する手段と、経路案内データによる案内経路に
地上区間と地下街区間が含まれる場合に、現在位置が当該地上区間と当該地下街区間との
境界位置から所定距離内に含まれるか否かを判定し、判定結果に基づいてGPSナビモー
ドと歩数計ナビモードとを切り替える手段とを備える。
(もっと読む)
ナビゲーション装置
【課題】少なくとも駐車動作中は後方撮影カメラの映像を表示し続けることで、スムーズな駐車を支援するナビゲーション装置を提供することである。
【解決手段】車両に搭載されるナビゲーション装置であって、車両に搭載され該車両の後退時に該車両の後方映像を撮影する後方撮影カメラから画像信号を受け表示部に表示するナビゲーション装置において、現在地が予め登録された地点に位置する場合、受信した後退ギア信号に基づき、後方撮影カメラで撮影された画像の表示を開始し、受信した信号に基づき後退ギアから後退ギア以外に変更されたと判定しても後方撮影カメラで撮影された画像の表示を継続する制御部を備えた構成とする。
(もっと読む)
ナビゲーション端末、ナビゲーション方法およびナビゲーションプログラム
【課題】案内経路上でGPS測位が困難な場所を通過する際のナビゲーション精度を向上させることが可能なナビゲーション端末を提供する。
【解決手段】ナビゲーション端末は、ナビゲーションサーバから経路案内データを取得する手段と、前記ナビゲーション端末の現在位置を算出するための基礎情報を取得する手段と、前記取得した基礎情報と前記経路案内データとに基づいて経路案内及び現在位置を出力する手段と、前記ナビゲーションの対象となる対象経路にはGPS電波の受信レベルに応じて第1階層レベルと第2階層レベルとが設定されている場合に、前記現在位置の座標が前記経路案内の目的地の座標から所定範囲内に含まれるか否かを判定し、判定結果が是である場合は、当該現在位置の階層レベルと当該目的地の階層レベルとが一致することを条件に、前記ユーザが前記目的地に到着したと判定する手段とを有する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法測位と間欠的なGPS測位とを併用して移動経路中の各地点の位置データを取得していく場合に、間欠的にGPS測位を実行するタイミングを適切に決定することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS測位手段に間欠的に測位を行わせる(S11〜S14)一方、この間欠的な測位の間に自律航法測位手段に連続的に測位を行わせて(S5,S6)移動経路に沿った位置情報を取得していく測位制御手段を備え、前記測位制御手段は、基準地点と測位地点との二点間距離を算出する距離算出手段(S8)と、距離算出手段により算出された二点間距離に基づきGPS測位手段の間欠的な測位の実行タイミングを制御する測位タイミング制御手段(S10)とを有する。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】ユーザの移動状態に応じて、適切な表示形態で地図を表示させる。
【解決手段】デジタルカメラは、3軸加速度センサ20Bから出力される3軸加速度データに基づいて振動周期を求め、特にX成分に基づいて垂直方向の振動周期を求め、振動周期に基づいてユーザの移動状態を検出する。デジタルカメラは、検出された種類のユーザの移動状態に基づいて、表示部16に表示させる地図の表示形態を設定する。デジタルカメラは、設定された表示形態で地図を表示部16に表示させる制御を実行する。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSで現在位置が測位できないときに好適な表示を行う。
【解決手段】GPS受信機が受信したGPS信号に基づいて、移動体の現在位置が検出されると(S200:Yes)、検出された現在位置に応じて、表示部の地図画像上に現在位置を表示させる(S202)。GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、移動体の現在位置を推定する(S206)。推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない(S212)。
(もっと読む)
車載機器、車載機器の制御方法、及び、プログラム
【課題】ユーザーに煩雑な作業をさせることなく、ユーザーの好みに応じて、ユーザーにとって有益な施設の情報を表示可能とする。
【解決手段】車載機器11は、駐車場の利用履歴を記憶する駐車場利用履歴記憶部35と、駐車場利用履歴記憶部35に記憶された駐車場の利用履歴と、駐車場に関連する施設の施設情報とに基づいて、ユーザーが利用する施設の施設種別の傾向を検出する傾向検出部37と、ユーザーが利用する傾向にある施設種別を有する施設の施設情報を、表示部28に表示する制御部25と、を備える。
(もっと読む)
ナビゲーション装置
【課題】 ユーザが現在位置を、マッチング処理されたマッチング位置と誤解することなく容易に把握することを可能にするナビゲーション装置を提供する。
【解決手段】 表示制御手段は、ナビゲーション装置が車両内に載置して使用されている場合は、マッチング制御手段においてマッチング処理されたマッチング位置を地図データまたは経路に合成した表示データを作成し、ナビゲーション装置が車両内に載置して使用されていない場合は、マッチング制御手段においてマッチング処理されたマッチング位置、及び現在位置検出手段によって特定された現在位置を画面分割によって別々に表示された別々の地図上に表示する表示データを作成する。
(もっと読む)
101 - 120 / 898
[ Back to top ]