
Fターム[2F129BB47]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | ハイブリッド (898)
Fターム[2F129BB47]に分類される特許
1 - 20 / 898
カーナビゲーションシステムを用いる車両走行制御装置
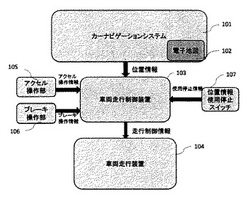
【課題】[0047]
近年、駐車場においてアクセルをブレーキと間違えて踏み、建物に突入したり、人身事故を起こしたりする事例が増えている。障害物を検知し自動停止する装置が自動車に実装されつつあるが、そもそもアクセルをブレーキと間違えて深く踏んでしまう事態には十分に対応できない。
【解決手段】[0048]
本発明によれば、駐車場のように建物の近くか内部にあり、人の往来も多い徐行すべき場所では、カーナビゲーションシステムの情報を用いて自動的に徐行になり、アクセルを過度に踏んでも徐行速度以上にはならず、車両自動停止装置が十分有効に機能することができる。
(もっと読む)
測位装置及びプログラム

【課題】一周波数GPS受信機を用いた場合でも、精度良く測位解を得る。
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
(もっと読む)
慣性航法演算方法及び慣性航法演算装置
【課題】慣性航法演算によって正確性の高い位置を算出するための新しい手法の提案。
【解決手段】第1演算システム1Aにおいて、運動に係る物理量を検出するセンサーとして、加速度センサー2A及びジャイロセンサー2Bの計測結果を用いて、INS演算部20が慣性航法演算を行う。この際、代表値算出部10は、所定の時間間隔毎に到来する時刻を跨ぎ、互いに時間的に重なり合うように設定される対象期間毎に、当該対象期間内に計測された計測結果の変動に基づいて算出方法を変更して計測結果を統計演算処理する。そして、INS演算部20が、代表値算出部10による統計演算処理の結果を用いて慣性航法演算を行う。
(もっと読む)
測位装置及びプログラム
【課題】GPS情報とINS情報とを統合して測位する場合に、測位解の信頼度を精度良く計算する。
【解決手段】走行軌跡算出部20で、Mエポック分のGPS情報及びINS情報に基づいて自車両の走行軌跡を算出し、初期値算出部24で、算出した走行軌跡に基づいて、Mエポック分の自車両の位置の初期値を算出する。誤差換算・方程式導出部26で、バンドルアジャストメント方式により、初期値に基づくGPS情報の観測方程式を導出すると共に、INS誤差を、各エポックにおける自車両から見たGPS衛星の方向に投影して擬似距離誤差に換算して、GPS誤差と統合する。測位解計算部28で、観測方程式から測位解を計算すると共に、統合された観測誤差に基づいて信頼度を計算する。
(もっと読む)
測位方法決定装置及び測位方法決定方法
【課題】 移動端末の状況に応じて適切な測位精度及び消費電力となるように測位方法を選択する。
【解決手段】 移動端末10は、移動体通信機能とGPS測位に用いられる信号の受信機能とを有すると共に自端末10の測位方法を決定する測位方法決定装置であって、自端末10が移動体通信機能によって受信した基地局からの電波の基地局送信電力を示す情報を取得する送信電力情報取得部13と、基地局送信電力を示す情報に基づいて測位方法を選択する測位方法選択部16と、選択された測位方法を示す情報を出力する出力部17とを備える。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびプログラム
【課題】複数の階層を有する場所での経路案内の利便性を向上させるナビゲーション装置を提供する。
【解決手段】入力された、出発地点から目的地点までの経路を探索する経路探索部112と、設定された選択位置が位置する階層を決定する階層決定部114と、表示装置13に出発地点から目的地点までの経路を表示する経路案内出力部115とを備え、経路案内出力部115は、経路が複数階層を通っている場合には、選択位置が位置する階層の経路部分を、選択位置の階層であることを示す第1の態様で表示し、他の階層の経路部分を、第1の態様と異なる第2の態様で表示する。
(もっと読む)
ナビゲーション装置および目的地リスト提示方法
【課題】目的地候補として提示されるリスト内から所望の施設を探して選択しやすい「ナビゲーション装置および目的地リスト提示方法」を提供する。
【解決手段】過去に目的地として設定したことのある施設を表す施設情報を、当該目的地に至る経路として設定された誘導経路中に有料道路が含まれているか否かを示す識別情報と共に記憶する履歴情報記憶部6と、ETC車載機200にETCカードが挿入されているか否かを検出するカード挿入検出部12と、履歴情報記憶部6を検索して目的地候補のリストを生成する履歴検索部10とを備え、ETCカードの挿入時は、誘導経路中に有料道路が含まれていることが示されている施設をリストの上位に掲載する一方、ETCカードの未挿入時は、誘導経路中に有料道路が含まれていないことが示されている施設をリストの上位に掲載した目的地候補のリストを生成して提示する。
(もっと読む)
評価表示システム、方法およびプログラム
【課題】ハイブリッド車両の運転者が自信の運転技術を向上させるための情報を案内する技術の提供。
【解決手段】表示部にハイブリッド車両の現在位置とともに当該現在位置の周辺の地図を表示し、前記ハイブリッド車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得し、前記今回の走行よりも過去における前記ハイブリッド車両の燃費の評価を前記単位区間毎に示す過去評価を取得し、前記地図上に前記単位区間毎の前記今回評価と前記過去評価とを併せて表示するとともに、EV走行とHV走行時の燃費の評価とを区別して表示する。
(もっと読む)
住所検索表示装置
【課題】住所の一部をなす、ある地名を表す地名文字列が入力されたとき、ユーザが選択する可能性が高い順に、地名文字列を含む住所をリスト表示すること。
【解決手段】 ユーザが入力した地名文字列を含む住所を、住所データベースより検索し、検索された候補住所を、行政区画単位で分割するとともに、分割した行政区画名と地名文字列が表す地名とを検索ワードとしてインターネット上で検索を行った場合にヒットする件数に基づいて、地名文字列が指し示す住所である確からしさを表す、当該住所の強度を算出する。そして、算出された強度に基づき、地名文字列が指し示す住所である確からしさが高い順に、検索された候補住所をリスト表示する。
(もっと読む)
情報処理装置、受信情報サーバ、情報処理方法、プログラム、及び記録媒体
【課題】測位する場所毎に、より適切な動作条件を用いることによって消費電力を低減することができる測位装置を提供する。
【解決手段】情報処理装置は、測位衛星から受信する測位信号に基づいて測位する衛星測位部と、現在地に固有な環境情報を取得する環境情報取得部と、上記環境情報に基づいて、上記現在地における上記測位信号の状態を示す受信情報を取得する受信情報取得部と、上記受信情報に基づいて、上記衛星測位部の動作条件を設定する動作条件設定部と、を有する。
(もっと読む)
ナビゲーション装置および電子ベル制御方法
【課題】ナビゲーション装置に警報機能を持たせるとともに、走行中のユーザに対して最低限の簡単な操作方法を提供して警報機能の操作を許可するようにしたナビゲーション装置を提供する。
【解決手段】ナビゲーション装置1が自転車に装着されたことを検出する装着検出部18と、前記自転車が走行中であることを検出する走行・停止判別部16と、警報または警報メッセージを音声データとして予め記憶した記憶部102と、音声出力部13から前記警報または警報メッセージを出力するよう制御する電子ベル制御部17と、を備え、前記走行・停止判別部16が、前記自転車が走行中であると判別した場合、前記タッチパネルのタッチ操作を検出すると、前記電子ベル制御部17は音声出力部13から前記警報または警報メッセージを出力するよう制御する。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
ナビゲーションシステム
【課題】携帯端末装置において車両位置検出および周辺地図描画を行って車載装置に地図表示を行う際に車両位置検出不能時に車両位置を更新することができるナビゲーションシステムを提供すること。
【解決手段】車載装置50と携帯端末装置10とが互いに接続され、携帯端末装置10において車両位置が検出されて車両位置周辺の地図画像が車両位置画像とともに描画され、この地図画像の描画データが車載装置50に送られて車載装置50において車両位置周辺の地図画像表示が行われる。車載装置50では、車両位置検出部54によって車両の位置が検出され、スクロール・回転指示部119によって、携帯端末装置10における車両位置検出が不能になったときに、車両位置検出部54によって検出された車両位置に対応する移動量の表示スクロール指示を携帯端末装置10に送るとともに、走行位置マーク描画部114によって、スクロール後の地図画像に走行位置マークを重ねて描画する処理が行われる。
(もっと読む)
ナビゲーションシステム
【課題】携帯端末装置において車両位置検出および周辺地図描画を行って車載装置に地図表示を行う際に車両位置検出不能時に車両位置を更新することができるナビゲーションシステムを提供すること。
【解決手段】車載装置50と携帯端末装置10とが互いに接続され、携帯端末装置10において車両位置が検出されて車両位置周辺の地図画像が車両位置画像とともに描画され、この地図画像の描画データが車載装置50に送られて車載装置50において車両位置周辺の地図画像表示が行われる。車載装置50では、車両位置検出部54によって車両の位置が検出され、走行位置マーク描画部114によって、携帯端末装置10における車両位置検出が不能になったときに、車両位置検出部54によって検出された車両位置に対応する走行位置マークを地図画像に重ねて描画する処理が行われる。
(もっと読む)
慣性航法システムのための誤差修正を備えた方法、装置、およびシステム
【課題】慣性航法システムのための誤差修正方法を提供する。
【解決手段】この方法は、移動対象の現在の位置決めパラメータ、航法マップに基づく基準位置決めパラメータ、およびGPSに基づく基準位置決めパラメータに基づいて慣性航法システムの動作状態を決定するステップと、慣性航法システムの初期パラメータをGPSに基づく基準位置決めパラメータに置き換えるステップと、慣性航法システムが異常動作状態にあると決定された場合、慣性航法システムを初期状態にリセットするステップとを有する。
(もっと読む)
測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システム
【課題】取得した軌跡から軌跡が位置する場所の状態を識別することができること。
【解決手段】測位場所識別システムは、ネットワークを介して相互に接続される端末11及びサーバ12を備える。端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数のGPS測位データを取得する。端末又はサーバは、端末11により取得された複数のGPS測位データに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】GPSの電波受信がなされていない状況下での移動経路の補正を適正に行う。
【解決手段】測位装置100であって、GPSアンテナ2aによる信号の受信の再開後、GPS処理部2により測定された測位再開地点の位置に基づいて、自律航法制御処理部4により測定された移動経路の各地点の位置データを補正する補正処理部6と、測位再開地点の位置データと、GPS測位が再開された時点での自律航法測位された移動経路の第2地点の位置データとの差異量が所定値よりも大きいか否かを判定する判定部c1と、当該差異量が所定値よりも大きいと判定された場合に、移動経路の第1地点から第2地点までの経路長に対する移動経路の各地点までの経路長に基づいて、移動経路の各地点の位置データを補正させる第1補正処理を実行させる補正制御部6cとを備えている。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が走行する道路の車線数から車両が走行中の道路で行うことができる最大の車線変更回数を特定し(S52)、特定された最大の車線変更回数に基づいて車両の検出位置の誤差範囲を推定する(S53)ように構成する。
(もっと読む)
車載カメラシステム及び画像表示装置
【課題】 車両のバッテリを無駄に消耗させることなく、車両を後退させる際に、リアカメラにより撮影した後方画像を速やかに表示させる。
【解決手段】 ドライブモード又はパーキングモードが選択されたとき、選択されたモードを示すモード信号を受信するモード信号受信部と、ドライブモードが選択されたことを示すモード信号に次いで、パーキングモードが選択されたことを示すモード信号を受信した場合に、ドライブモードからパーキングモードへのモード切替状態を示すモード切替データを記憶するモード切替データ記憶部と、車両のフットブレーキ操作信号を受信するフットブレーキ操作信号受信部と、フットブレーキ操作信号を受信したとき、モード切替データ記憶部にモード切替データが記憶されている場合、カメラをオン状態に設定し、カメラにより撮影された後方画像を表示部に表示させる制御を行う制御部とを備える。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の位置を正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点を直進して通過する場合に、バックカメラ19で撮像した画像に基づいて車両が走行する道路上に存在する地物を検出し(S13)、検出された地物の配置パターンである検出配置パターンが、分岐点へ進入する進入道路上に設けられた地物の配置パターンである進入側配置パターンと一致する場合に、分岐点の周辺に設けられた地物又は分岐点のノードとの相対位置によって移動体の位置を特定する(S18、S19)ように構成する。
(もっと読む)
1 - 20 / 898
[ Back to top ]