
Fターム[2F129BB48]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | カルマンフィルタ (189)
Fターム[2F129BB48]に分類される特許
1 - 20 / 189
慣性航法演算方法及び慣性航法演算装置
【課題】慣性航法演算によって正確性の高い位置を算出するための新しい手法の提案。
【解決手段】第1演算システム1Aにおいて、運動に係る物理量を検出するセンサーとして、加速度センサー2A及びジャイロセンサー2Bの計測結果を用いて、INS演算部20が慣性航法演算を行う。この際、代表値算出部10は、所定の時間間隔毎に到来する時刻を跨ぎ、互いに時間的に重なり合うように設定される対象期間毎に、当該対象期間内に計測された計測結果の変動に基づいて算出方法を変更して計測結果を統計演算処理する。そして、INS演算部20が、代表値算出部10による統計演算処理の結果を用いて慣性航法演算を行う。
(もっと読む)
ナビゲーションシステム、端末装置

【課題】処理時間を抑制しながら適切な誘導経路を探索することができるナビゲーションシステムおよび端末装置を提案する。
【解決手段】地図データに通過頻度が高い地点についての情報を登録しておき、その地点の中から経由地を選択する。そして、選択された経由地を経由する出発地から目的地までの誘導経路を探索する。地点の通過頻度は、予め経路探索することによって得られた経路に含まれる回数および/または車両の走行履歴に基づいて設定する。
(もっと読む)
状態推定装置
【課題】非線形カルマンフィルタを用いて高速且つ正確な状態推定を行う。
【解決手段】携帯機器1は、3次元地磁気センサ70、3次元加速度センサ80、CPU10、状態推定プログラム100を備え、状態推定プログラム100は、複数の磁気データq1〜qNの示す座標を近傍に有する球面の中心点cSの座標を算出する中心点算出モジュール300と、複数の加速度データa1〜aMに基づいて、携帯機器の動きが安定しているか否かを判定する安定性判定モジュール400と、安定性判定モジュール400が行う判定結果が肯定である場合に初期ベクトルINIを算出する初期ベクトル生成モジュール500と、初期ベクトルINIを初期値とする状態ベクトルxを観測値ベクトルyを用いて更新するカルマンフィルタモジュール600とを備える。
(もっと読む)
状態推定装置
【課題】高速且つ処理負荷の小さな非線形カルマンフィルタの演算を実現する。
【解決手段】状態推定装置は、3次元磁気センサ70を含む複数のセンサと、システムの状態を表す複数の状態変数を要素とする状態ベクトルxk及び複数のセンサからの出力値を要素とする観測値ベクトルykを用いて状態ベクトルxkを更新することによりシステムの状態を推定する複数のカルマンフィルタKFと、互いに異なる複数の初期ベクトルINIを生成し、状態ベクトルxkの初期値として複数のカルマンフィルタKFの各々に供給する初期値生成部200と、複数のカルマンフィルタKFの推定精度を各々評価することで、推定精度が最も高いカルマンフィルタを特定し、特定したカルマンフィルタKFを除く他のカルマンフィルタKFの動作を停止させるカルマンフィルタ制御部400とを備える。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
位置特定装置、位置特定方法、及びプログラム
【課題】ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定する。
【解決手段】自装置の位置を推定する位置推定部と、ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値Rcを、前記ビーコン位置Pbの重みとして、前記位置推定部が推定した推定位置Pcと前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置Pとして特定する位置特定部とを備える。
(もっと読む)
状態推定装置、オフセット更新方法およびオフセット更新プログラム
【課題】カルマンフィルタを用いて地磁気センサの正確なオフセット値を推定する
【解決手段】携帯機器1は、3次元地磁気センサ70、3次元加速度センサ80、3次元角速度センサ90、カルマンフィルタ演算部120及び初期値生成部140を備える状態推定部100、中心点導出部200、及び内部磁界Biを発生させる部品を備える。中心点導出部200は、3次元地磁気センサ70から順次出力される複数の磁気データqiで示される座標が内部磁界Biの成分を示す座標を中心点とする第1球面Sの近傍に確率的に分布すると仮定して、第1球面Sの中心点cOを算出する。カルマンフィルタ演算部120は、3次元地磁気センサ70のオフセットqOFFを推定する状態変数qOを含む複数の状態変数を要素とする状態ベクトルxkを更新し、中心点導出部200が中心点cOを算出した場合には、状態変数qOを中心点cOによって上書きする。
(もっと読む)
カルマンフィルタ、状態推定装置、カルマンフィルタの制御方法、及びカルマンフィルタの制御プログラム
【課題】カルマンフィルタの計算量を低減する
【解決手段】カルマンフィルタKFは、姿勢q+k−1及びベクトルβ+k−1を要素とする状態ベクトルx+k−1を、状態遷移モデルに適用して、姿勢q−k及びベクトルβ−kを要素とする状態ベクトルx−kを算出する推定状態ベクトル算出部140と、状態ベクトルx−kの推定誤差の共分散P−kを算出する共分散算出部125とを備える。推定状態ベクトル算出部は、ベクトルβ−kをベクトルβ+k−1と等しい値に設定し、共分散算出部125は、共分散P−kのうち、ベクトルβ−kの推定誤差の共分散を表す成分P−ββ,kを、状態ベクトルx+k−1の推定誤差の共分散P+k−1のうち、ベクトルβ+k−1の推定誤差の共分散を表す成分P+ββ,k−1、及び、状態遷移モデルのプロセスノイズの共分散(Qk)のうち、ベクトルβ+k−1のプロセスノイズの共分散を表す成分Qββの和として算出する。
(もっと読む)
走行軌跡記憶装置
【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法
【課題】車両における全地球測位システム(GPS)および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックを提供する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
(もっと読む)
衛星測位データおよび車両センサデータに基づく車両ナビゲーション
【課題】車両ナビゲーションの方法の提供。
【解決手段】車両ナビゲーションの方法であって、車両の衛星測位装置から衛星測位データを取得することと、車両センサから車両センサデータを取得することと、カルマンフィルタによって衛星測位データおよび車両センサデータを結合し、車両の結合された状態ベクトル推定値を取得することとを含み、カルマンフィルタが、衛星測位データを受信し車両の第1の状態ベクトル推定値および対応する第1の状態誤差共分散行列を生成する第1のフィルタと、車両センサデータを受信し車両の第2の状態ベクトル推定値および対応する第2の状態誤差共分散行列を生成する第2のフィルタと、第1の状態ベクトル推定値と第1の状態誤差共分散行列と第2の状態ベクトル推定値と第2の状態誤差共分散行列とを受信し、結合された状態ベクトル推定値および対応する結合された状態誤差共分散行列を生成する第3のフィルタとを備える、方法。
(もっと読む)
密結合GPSおよび推定車両航法
【課題】密結合GPSおよび推測航法システムは、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両範囲および方向を演算する。
【解決手段】推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。車輪半径の連続的なキャリブレーションおよび速度効果に対する補正は、GPS fixから演算され、それは、GPS信号受信の長い休止期間中の推測航法性能および精度を改善する。GPS信号が回復されるとき、本推測航法解は、周囲を探索するGPS受信器のための高品位な開始点を提供する。
(もっと読む)
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
(もっと読む)
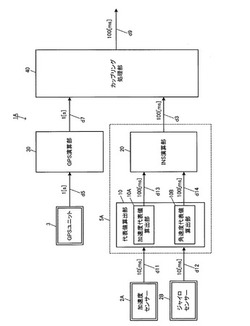
位置算出方法及び位置算出装置
【課題】慣性測位用ユニット及び衛星測位用ユニットそれぞれの計測結果を併用して、位置をより正確に算出するための手法の提案。
【解決手段】位置算出装置1において、移動体に設置された慣性測位用ユニット2の計測結果を用いて、少なくとも移動体の位置を演算する第1の演算処理が第1の演算処理部5により実行される。また、第1の演算処理の結果と、移動体に設置された衛星測位用ユニット3の計測結果とを用いて、移動体の位置を演算する第2の演算処理が第2の演算処理部7により実行される。そして、第1の演算処理の結果と、第2の演算処理の結果とを用いて、第1の演算処理に係る演算係数が演算係数調整部9により調整される。
(もっと読む)
ADS−B送信の受信からの状態ベクトル、タイミングおよびナビゲーション品質値の決定
【課題】空中、海上または地上ベースのプラットフォームにおけるモバイルデバイスの位置決定方法の提供。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
(もっと読む)
位置算出方法及び位置算出装置
【課題】 移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】 GPSユニット3とINSユニット5とを備えた位置算出装置1において、位置算出精度判定部6は、位置算出精度を判定する。影響度合設定部7は、位置算出精度判定部6により判定された位置算出精度に基づいて、GPS計測結果のINS計測結果に対する影響度合を設定する。カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】GPSユニット3とINSユニット5とを備えた位置算出装置1において、影響度合設定部7は、位置算出を開始してから所与の条件が成立するまでの間は、GPS計測結果のINS計測結果に対する影響度合を第1の度合に設定し、所与の条件が成立した後は、影響度合を第1の度合よりも低い第2の度合に設定する。そして、カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
状態推定装置、電子機器及びプログラム
【課題】 カルマンフィルターの内部状態変数と観測量の補正処理により、推定精度を維持することができる状態推定装置の提供。
【解決手段】 状態推定装置100は、観測信号に基づきシステムの内部状態をカルマンフィルターにより推定する状態推定部180と、観測信号を観測量に変換する信号変換部120と、観測量の補正処理を行う補正部160と、補正部160と状態推定部180を制御する制御部140とを含む。制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行う。補正部160は、補正指示が行われた場合に、観測量の補正処理を行う。状態推定部180は、補正指示が行われた場合に、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づき状態推定を行う。
(もっと読む)
姿勢判定方法、位置算出方法及び姿勢判定装置
【課題】移動体に対するセンサーの姿勢を判定するための新たな手法を提供する。
【解決手段】移動体に設置されたセンサー3により移動ベクトルが計測される。そして、移動体が移動を開始した際にセンサー3が計測した移動ベクトルを用いて、移動体に対するセンサー3の姿勢が判定され、移動体が停止している場合に、移動体の速度に関する制約条件を用いて、センサー3の計測結果が補償される。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】高精度でないIMUと1台のGPS受信機とを用いて車両の位置を高精度に標定できるようにすることを目的とする。
【解決手段】初期値算出部110は、車両の出発時に3自由度2次元航法により方位角の初期値を算出する。走行時標定部121は、車両が停車するまで、方位角の初期値または前回の方位角を用いて6自由度3次元航法により位置と姿勢と方位とを標定する。停車時標定部122は、車両が停車している間、方位角を拘束する拡張ZUPTアルゴリズムに基づいて6自由度3次元航法により位置と姿勢と方位とを標定する。
(もっと読む)
1 - 20 / 189
[ Back to top ]