
Fターム[2F129BB49]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282)
Fターム[2F129BB49]の下位に属するFターム
パターンマッチング (131)
投影法 (42)
上下判定 (41)
車線・道路幅データの利用 (62)
Fターム[2F129BB49]に分類される特許
201 - 220 / 2,006
表示制御装置及び車載表示システム
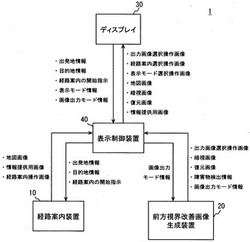
【課題】前方視界改善画像の視認性の低下を防止しつつ、前方視界改善画像及び情報提供用画像の双方を1つのディスプレイに表示することのできる表示装置及び車載表示システムを提供する。
【解決手段】車載表示システム1では、表示制御装置40は、前方視界改善画像及び地図画像を表示可能なディスプレイ30の表示領域Aに、前方視界改善画像及び地図画像のうち少なくとも前方視界改善画像が表示されている間に、情報提供用画像が取得されたことに基づいて、前方視界改善画像上に、情報提供用画像の透過画像を重畳表示する。
(もっと読む)
ナビゲーション装置

【課題】運転手の特性を考慮に入れた到着予想時刻を算出する。
【解決手段】制御部10は、車両が過去に走行した道路に対応したリンクについて、リンク長を合計した特性リンク長と、実所要時間を合計した特性実時間を算出する。そして、算出した特性リンク長と特性実時間とを利用して、車両の運転手の特性に応じた特性速度を算出する。制御部10は、経路探索処理により探索された推奨経路に含まれるリンクについて、そのリンク長と特性速度とに基づいて、推奨経路の所要時間を算出する。これにより、車両の運転手の特性に応じた推奨経路の所要時間を算出でき、その結果運転手の特性に応じた到着予想時刻を算出することができる。
(もっと読む)
インフラ協調車載機およびインフラ協調車載機用のプログラム
【課題】道路上または道路近傍の通信装置と連動したインフラ協調システムにおいて、インフラ協調に適した方法で、マップマッチング機能を利用せず、逸脱判定を行う。
【解決手段】ビーコンからデータを取得してサービスインした後に経路を逸脱したと判定した場合、注意喚起の報知をせずサービスアウトする。逸脱したか否かは、自律航法用のセンサの出力に基づいて、車両の現在の走行方位、および、データを取得してから現在まで車両が走行した距離を算出し(ステップ141)、走行した距離と当該データに含まれる当該経路中の各区間の長さの情報とに基づいて、車両が現在走行中の現在走行区間を特定し(ステップ142)、当該データに含まれる経路中の各区間が向いている方位の情報に基づいて、現在走行区間の向いている方位を特定し(144)、算出した走行方位と、現在走行区間が向いている方位との乖離量に基づいて、逸脱したか否かを判定する(146)。
(もっと読む)
ナビゲーション装置
【課題】 表示が煩雑になることなく、自車の運転の状態を表示するナビゲーション装置を得る。
【解決手段】 自車位置を特定する自車位置特定手段1と、地図データを記録した地図データベース11と、車両データを取得する車両データ取得手段6と、地図データ上に自車位置を示す自車マークを表示する表示手段5と、車両データを用いて運転の状態を判断し、これに基づいて自車マークを変更するデータ処理手段13とを備え、自車マークにより車両の運転状態を表すものである。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】地図データ内に区域情報が存在しない目的地に対しても、目的地を範囲として捉えた経路案内を行う。
【解決手段】地図データ15内に目的地の区域情報が存在しなくとも、既存の地図データ15の情報から目的地の範囲を示す区域情報を作成することができる。よって、地図データ15の増大を招くことなく、目的地を範囲として捉えた経路案内を行うことができる。これにより、ユーザは意図した目的地点を含む範囲の境界に案内されたことを認知することができる。
(もっと読む)
ナビゲーション装置および行程ガイド表示制御方法
【課題】面倒な操作を行うことなく、現在地から高速道路を降りるまでに存在する道路区間の渋滞状況の全容を把握することが可能な「ナビゲーション装置および行程ガイド表示制御方法」を提供する。
【解決手段】誘導経路に沿って高速道路を走行中のとき、渋滞情報に基づいて、高速道路上のインターチェンジ、ジャンクション、サービスエリアおよびパーキングエリアに対応する地点間の道路区間のうち、渋滞中の道路区間を渋滞道路区間として特定する。そして、特定した渋滞道路区間が全て含まれるように行程ガイド画像を生成して表示することにより、従来の行程ガイド画像において画面枠外に存在していた渋滞道路区間も一画面内に表示されるようにし、ユーザがスクロール操作等の面倒な操作を行わなくても、現在地から高速道路を降りるまでに存在する道路区間の渋滞状況の全容を把握することができるようにする。
(もっと読む)
車載ナビゲーション装置
【課題】充電池による電動車両の走行可能距離をより精度良く算出することのできる車載ナビゲーション装置を提供する。
【解決手段】車載ナビゲーション装置1では、制御部20は、現在地天気情報、目的地天気情報、設定温度情報、及び現在地外気温情報を用いて、車載空調機の経路上における駆動状況の変化を予測し、その予測結果に基づいて走行可能距離Lを補正するとともに、電動車両の現在地を中心とし、その補正された走行可能距離Lを半径とした円を道路データに重ねて表示部16に表示する。
(もっと読む)
ナビゲーション装置およびネットワークデータのデータ構造
【課題】歩行の自由度が高い通路については歩行者の感覚に合わせた案内情報を生成して案内するナビゲーション装置およびネットワークデータのデータ構造を提供する。
【解決手段】ナビゲーション装置1は、リンクが表現する通路の幅に対して実際に歩行可能な領域の幅が広いことを示す情報が付与されている形状鈍化対象リンクを含むネットワークデータ19を用いて経路を案内するための案内情報を生成して案内するナビゲーション装置1であって、ネットワークデータ19を用いて設定された設定経路を案内するための案内情報であって、形状鈍化対象リンクの形状を鈍化させて反映させた修正線を案内情報として生成する案内情報生成部14と、修正線基づいて強調表示させた誘導線を用いて案内する案内部16とを備える。
(もっと読む)
地図表示装置
【課題】移動先地点が表示部の画面の枠外に存在している場合に、移動元地点と移動先地点との位置関係を把握できる態様で地図を表示し、しかも、その表示処理を精度良く実行する。
【解決手段】地図表示装置10は、地図データに基づいて表示部16の画面に表示された地図において、移動元領域抽出部20により移動元領域を抽出し、移動先領域抽出部21により移動先領域を抽出し、移動先領域位置変更部22により移動元領域を表示部16の画面に表示した状態を維持しつつ表示部16の画面上における移動先領域の位置を変更し、現在位置抽出部23により車両の現在位置を抽出し、基準点抽出部24により車両の現在位置に基づいて定められる基準点を抽出し、縮尺変更部25により移動元領域と移動先領域との間における地図の縮尺を基準点を起点として変更して表示する。
(もっと読む)
車両用表示装置および車両用映像表示制御方法
【課題】狭路や狭い屈曲路を走行中に最も接触の危険性が高い車体部分を含んだ範囲の映像に自動的に切り替えて表示する車両用表示装置を提供する。
【解決手段】表示コントローラ11は、ナビゲーション装置13により取得した車両の現在位置周辺の道路地図情報、車両周囲センサ14により測定された車両周辺の障害物までの距離を用いて、狭路または屈曲路へ接近または進入したことを判別し、さらに、車両情報収集手段12により収集された車両情報を用いて、判別された狭路またはクランクにおける走行状況を識別し、車載カメラ15で撮影した車両周辺の映像の表示内容を指示する表示制御指令を出力することにより、カメラ映像切替装置16は、該表示制御指令の表示内容が指示する通り、仮想カメラの視点位置と視点方向と表示範囲とを変更した映像に切り替えて表示装置17へ表示する。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSで現在位置が測位できないときに好適な表示を行う。
【解決手段】GPS受信機が受信したGPS信号に基づいて、移動体の現在位置が検出されると(S200:Yes)、検出された現在位置に応じて、表示部の地図画像上に現在位置を表示させる(S202)。GPS信号に基づいた位置検出ができないとき、位置検出が不能になる以前の移動体の状態及び位置検出が不能になった以降のジャイロスコープの出力に基づいて、移動体の現在位置を推定する(S206)。推定された現在位置と道路との乖離が所定距離以上であれば、前記推定された現在位置に応じた現在位置の表示を行わない(S212)。
(もっと読む)
位置情報提供装置、位置情報提供方法、位置情報提供システム、及びプログラム
【課題】地図上における音の発信位置を提供する。
【解決手段】位置情報提供装置10は、音データの発信位置を示す音位置情報を取得する音位置情報取得部123と、上記音データの発信位置を示すアイコンを地図上に重畳した地図表示画面の表示を制御する表示制御部153とを有する。
(もっと読む)
車両駆動制御装置
【課題】目的地に至る経路を特定するための操作を必要とすることなく、エネルギー消費量の低減を図る。
【解決手段】制御指標のスケジュールを規定するための走行条件を区間毎に収集して耐久記憶媒体23に蓄積記憶させる。バッテリ残量が下限規格値または上限規格値となった場合、このバッテリ残量が下限規格値または上限規格値となった地点を含む前後の一定区間を計画制御対象候補区間とし、この区間について耐久記憶媒体23に蓄積記憶された走行条件を用いてバッテリ残量が規格範囲内となるように制御指標のスケジュールを計画する。車両が計画制御対象候補区間に進入した場合、この区間の制御指標のスケジュールに従って動力源の駆動制御を行う。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSの測位誤差による誤表示を防止する。
【解決手段】移動体位置を道路リンクに対応付けるリンクマッチングを行う(S300)。第1の時刻の移動体位置と対応付けられた第1の道路リンクと、第1の時刻以前の第2の時刻の移動体位置と対応付けられた第2の道路リンクとが、直進性を有しない不連続な位置関係にあるとき、第1の時刻と第2の時刻との間にジャイロスコープが出力した変位角に基づいて、第1の道路リンクへのリンクマッチングが適当であるか否かを判定する(S304)。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】ジャイロスコープを搭載した可搬型情報処理装置を用いて、表示精度の高い地図表示装置を実現するための技術を提供する。
【解決手段】地図データに基づく地図画像を表示するディスプレイ5と、移動体の向きの変位角を検出するジャイロスコープ7と、複数の異なる時刻における移動体の位置を示す移動体位置情報を記憶する車両データ記憶部12と、移動体位置情報に基づいて、移動体が進行している進行方位を検出する演算処理部11と、出発地と目的地の指定を受け付けて、前記出発地から前記目的地までのルートを設定するルート検索部16と、ルート検索部16が設定したルートに従うナビゲーションの開始時に演算処理部11が検出した進行方位を基準進行方位とし、基準進行方位及びジャイロスコープ7が検出した変位角に応じて、ディスプレイ5に地図画像を表示させる表示制御部13と、を備える。
(もっと読む)
地図画像表示装置、地図画像の表示方法及びコンピュータプログラム
【課題】ユーザにとって有用なエリアの地図データを優先的に案内することを可能とした地図画像表示装置、地図画像の表示方法及びコンピュータプログラムを提供する。
【解決手段】第1表示形態に基づく走行案内画面60を液晶ディスプレイ15に表示した状態で交差点拡大図67を消去する操作を受け付けた場合には、第1対象エリア71に隣接する隣接エリア72の地図データに基づいて表示対象とする地図データのエリアである第2対象エリアを設定し、交差点拡大図67の消去に応じて、地図画像の液晶ディスプレイ15に対する表示態様を、第1表示態様から特定エリア66を含む地図表示エリア65に対して、地図情報DB31より第2対象エリアの地図データを読み出して地図画像を表示する第2表示態様へと変更するように構成する。
(もっと読む)
車両用ナビゲーション装置
【課題】離脱領域を確実に判定してマップマッチング動作による不具合を防止する車両用ナビゲーション装置を提供する。
【解決手段】カーナビは、マップマッチング動作により道路を走行している場合に使用者が方向指示器を操作して分岐したときは(S1:YES)、その分岐点の情報を一時的に記憶し(S2)、その後に路側近接通信機から取得した道路情報が新規道路であることを示していた場合は(S10:YES)、マップマッチング動作を停止してGPSによるフリー軌跡モードに移行し(S11)、解除条件が成立した場合は(S13:YES)、マップマッチング動作に復帰し(S14)、分岐点から解除点までを解除領域として地図データとして登録し(S16)、次の走行時に離脱領域を走行する場合は、マップマッチング動作を停止する。
(もっと読む)
車載情報システム、車載装置、情報端末
【課題】情報端末において車両からの情報が必要なときにその情報を確実に取得しつつ、車両と情報端末との間で通信される情報量を低減する。
【解決手段】携帯端末2は、制御部20により車両情報が必要であるか否かを判定し、車両情報が必要であると判定したときには、インタフェース部25により要求データを車載装置1へ送信して車両情報の要求を行う。車載装置1は、携帯端末2からの要求に応じて、制御部10により車両から車両情報を収集し、携帯端末2へ送信する。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車両がUターンを行ったことを正確に判定することが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車両がUターンを行う場合に乗員に負担がかかることなく安全にUターンを行うことが可能な車両の横方向に生じる加速度の許容値(横加速度許容値)を設定し、設定された横加速度許容値や幅員曲率半径に基づいて“車両が道路でUターンする為の上限速度”を設定し、車両が一方通行区間の走行中にUターン可能な旋回を行った場合であって、その時の旋回速度が“車両が道路でUターンする為の上限速度”以下である場合に車両がUターンを行ったと判定するとともに、車両がUターンを行ったことによって逆走状態にあると認定し、車両が逆走していることを警告するように構成する。
(もっと読む)
201 - 220 / 2,006
[ Back to top ]